|
55076| 25
|
[项目] 3D打印之进击四足(联机版)——详细教程篇(机械,电子) |
|
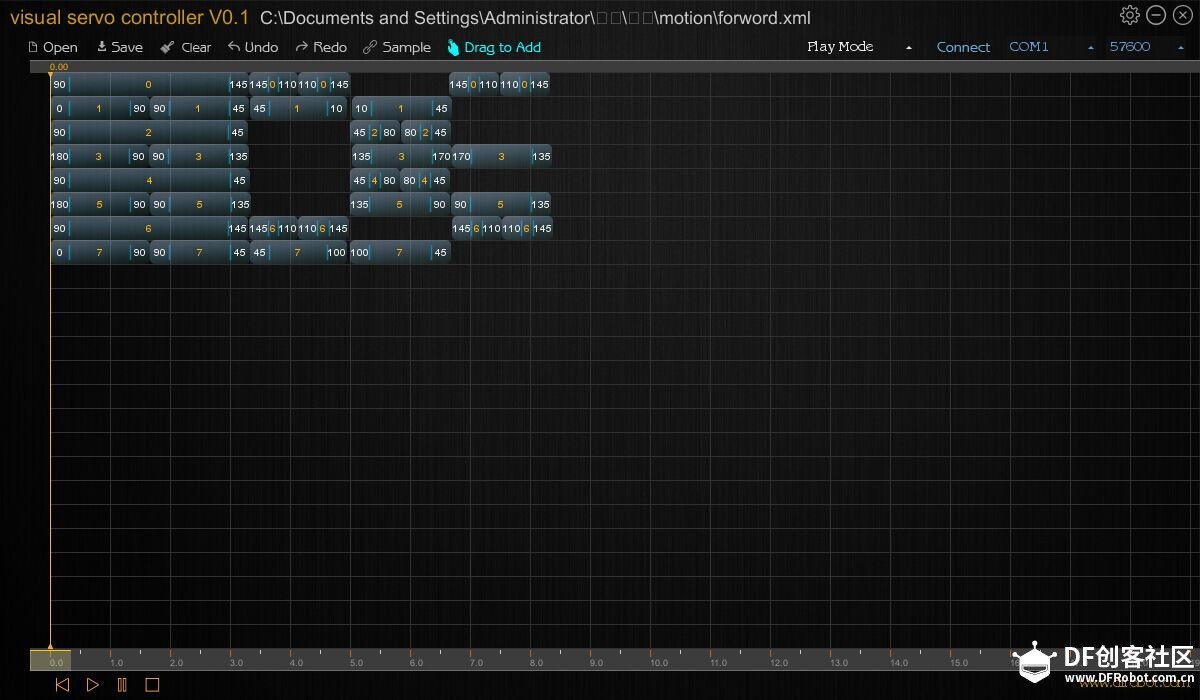
本帖最后由 hnyzcj 于 2015-6-12 11:27 编辑 在开始这篇教程前,我首先向一些小伙伴道歉,在我的“忽悠”下,他们购买了虫子套件,更是由于我没有事先自己测试一下,导致了一些不必要的麻烦。因此在这里奉献上详细教程,希望对大家的制作有所帮助。 【项目介绍】 使用3D打印机机打印出自己喜欢或者设计的个性化机器人,想必是创客都想做的事情。今天这里给大家分享案例是一只四条腿的爬虫机器人,这里只是一个提供一个移动的平台,具体功能希望大家能够继续做下去,拓展出更多有趣的玩法。来让我们一起来享受这造物的乐趣吧。本案例由由DF—LEE提供(在此表示感谢!)。 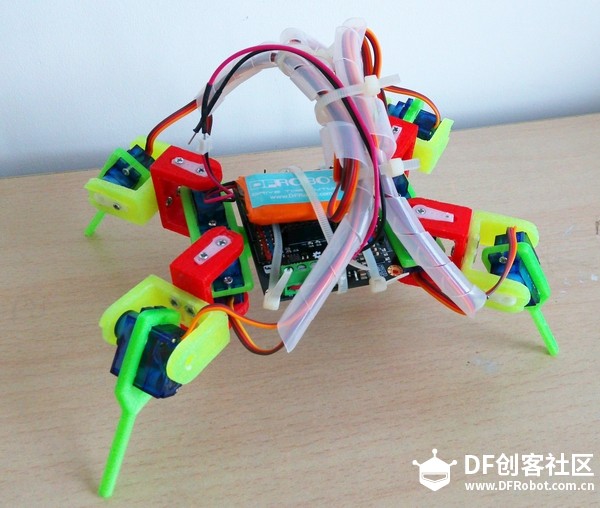 http://www.tudou.com/programs/view/jEUdo7OWZW0/ 【项目器材】 1.75mm PLA (1公斤) 3D打印耗材 (荧光绿、红色、黄色) DFrobot SG90舵机 8 DFrobot 24路舵机控制板 1 DFrobot 3.7V锂电池 1 DFrobot 3.7V锂电池充电器 1 【制作步骤】 A虫子的机械结构部分。 1.结构打印 用3D打印机打印出虫子的机械结构(3D模型在帖子附件)。这里要说明下有小伙伴反应:“提供的模型文件打印出的关节部分,舵机很难安装进去”。这里提供2中解决方案:一对打印后的关节部分进行修模,这个是苦逼的活,修模需要时间和耐心(我是这样做的);二对提供的模型文件进行优化,适当放大比例。这里友情提示,由于考虑到PLA的弹性和硬度问题,建议打印填充率设置为100%。  (新鲜出炉的虫子,有没有来一盘,哈哈) 2.腿部安装 拿出打印的腿部,将1个舵机安放进去。如果感觉尺寸不合适,请用锉刀适当修理,如下图所示平整安放好腿部舵机,并用小螺丝固定。(注意在安装舵机时,对于舵机的信号线要小心处理不要弄断)。其他3条腿,依次安装。 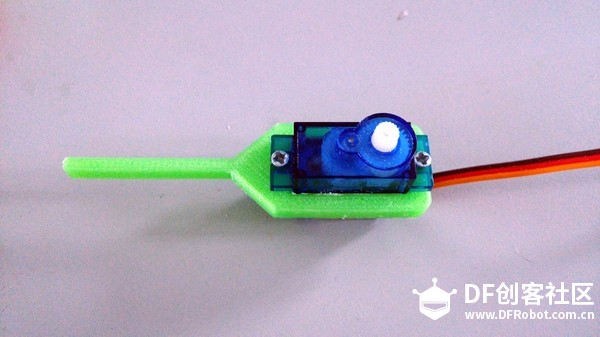 3.肩部安装 拿出打印的肩部,将2个舵机分别安装在肩部左右孔固定位中。具体方法如腿部安装类似,这里再次提醒一定要注意舵机信号线,千万别弄坏,否则后面你就玩不了。 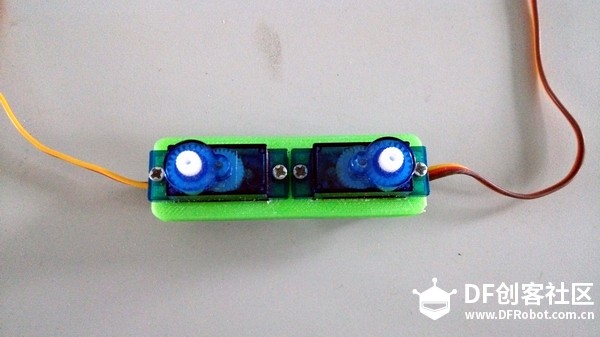 4.关节安装 取出两个关节,用M3螺丝固定。注意两个关节的安装呈90度垂直方向,带有舵机孔的一端相互之间位置如下图所示。这里的舵机安装可能是最麻烦的,这也是小伙伴们反应问题最大的地方,解决方法上面已经说过。由于我采用的是修模的方法,所以在将舵机安装进去  5.腿部和关节组合 取出前面步骤中安装好的腿部和关节,将腿部舵机,轻轻的塞经关节固定件,并用螺丝固定舵机,这里建议使用两颗螺丝,前后两颗固定舵机舵盘如下图,防止舵机在转动过程中松动。 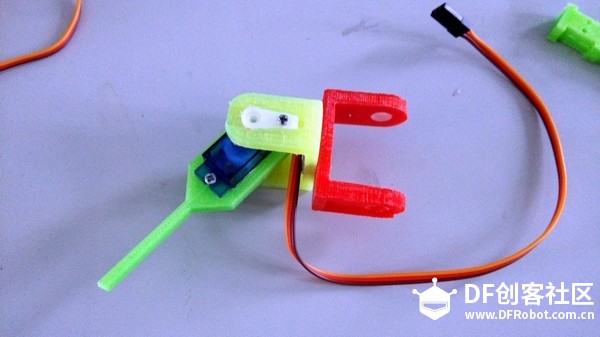 6.腿部、关节、肩部组合 取出前面步骤中安装好的腿部、关节组合与肩部组合在一起。 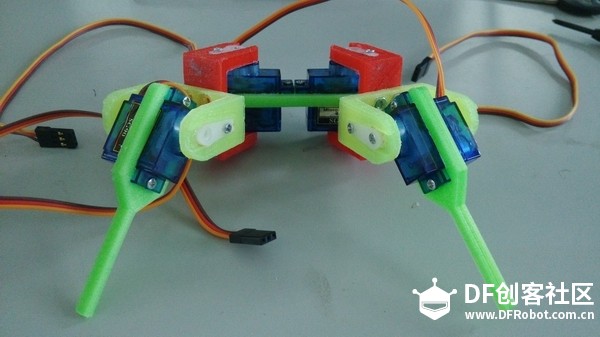 7.腿部、关节、肩部、躯干组合 取出前面步骤中安装好的组合与躯干部分组合在一起,并用螺丝固定。 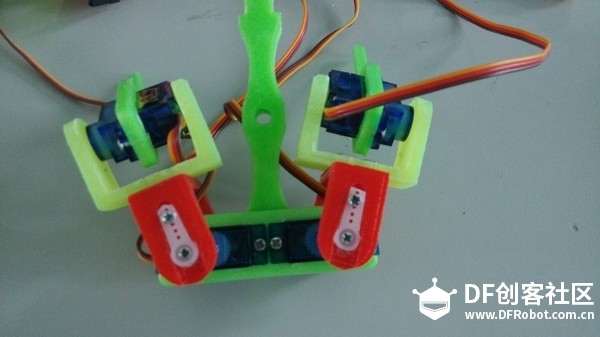 8.组合成型 取出前面步骤中安装好的组合与躯干部分组合在一起,并用螺丝固定。(整体效果)  这里的初始化只是一个相对的位置,其目的是为了让舵机活动的范围尽量在自己预设的范围内。因为一加电后产生的脉冲引发舵机的角度的改变。我们这里将关键部分尽量向里收,作为起始点。腿部也遵循此规则向内收缩到极限位置。 10.数据连线 为了简单起见,我在制作时,将关节部分的部位的舵机连接在控制板的(0,2,4,6口),各关节对应的腿部连接在(1,3,4,7口)。 B.虫子电子部分 此次推荐使用 的控制板是威龙24路舵机控制器,这也是很多小伙伴吐槽的焦点所在。主要集中在电池的供电与脱机运行(这个可能是最大的尿点,当时我以为这块板子可以脱机使用)两个方面。 1.驱动安装 初次使用Veyron Servo Driver 24-Channel,都需要为其安装DFU和虚拟串口两个驱动程序。 首先按照如下步骤安装DFU驱动程序:(windos环境)将Veyron Servo Driver 24-Channel连接到计算机的USB接口。 按下左下角的复位键(印有“RET”的按键),这时蓝色指示灯会快速闪烁6次,然后慢闪烁几次。 再次按下复位键,这次在蓝色指示灯快速闪烁6次期间按下另一个键(右上角,印有“BOOT0”)并保持不放,直到指示灯开始慢闪烁时放开。蓝色指示灯会一直闪烁,使你有机会安装DFU驱动程序。(这里一定要提醒各位是在蓝色指示灯快闪的时候按下BOOT0的,否则后面蓝色指示灯不会再一直闪烁) 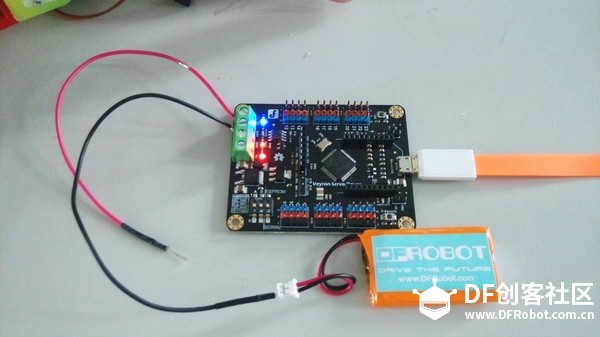 Windows会提示你需要驱动程序,人工指定驱动程序所在目录位置,选择DFservo文件夹中的mapleDrv\dfu。 安装虚拟串口驱动程序: 复位Veyron Servo Driver 24-Channel的RET按键,等待蓝色指示灯停止闪烁。此时Windows会提示安装驱动程序,同样,人工指定驱动程序所在目录为DFservo文件夹中的mapleDrv\serial。 上述过程是电脑非常给面子的时候的安装过程,算是比较顺利的,但是可能有些小伙伴会遇到这样的问题。  当用USB数据线连接电脑时却得到“INF中服务安装段落无效”的错误提示。在“设备管理器”中看到“USB MODEM”设备出现一个黄色问号,出现这个问题并不是设备或驱动出了问题,而是用户采用了深度简化版的操作系统所致。所以用户只需在他人的电脑中分别找到C:\windows\inf目录下的mdmcpq.inf文件和C:\WINDOWS\system32\drivers下的usbser.sys文件,并将它们复制到本机相同的目录即可解决这个问题! 这里给大家提供两个文件的下载地址: usbser.sys 下载地址:usbser.sys 下载 mdmcpq.inf 下载地址: mdmcpq.inf下载 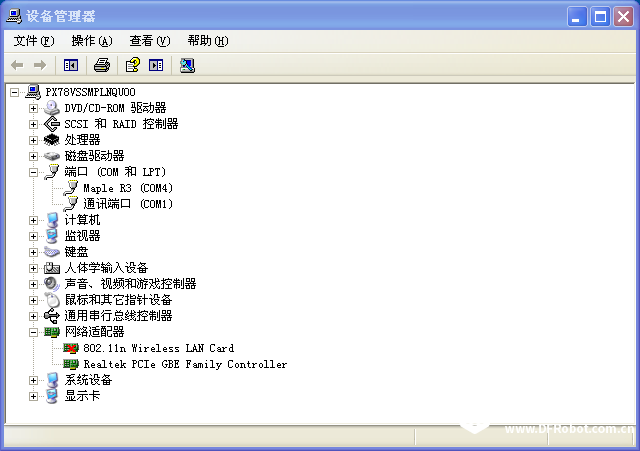 电池供电问题的解决 由于我的推荐大家购买的都是DFrobot 3.7V锂电池 ,与威龙舵机控制板没有办法直接连接,如果要剪断接头连线到舵机控制板,又会造成锂电池充电的不方便。所以我采用了导线引出的方法,既方便连接舵机控制板,又不影响电池充电。 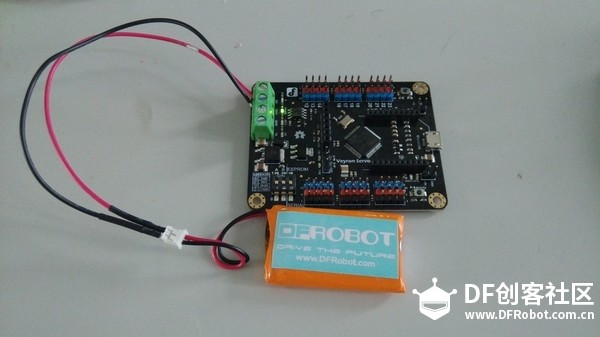 C.联机调试 联机调试采用的是上位机软件,软件界面如下图所示,我想DF的这张软件使用说明图足以满足大家的需要了。 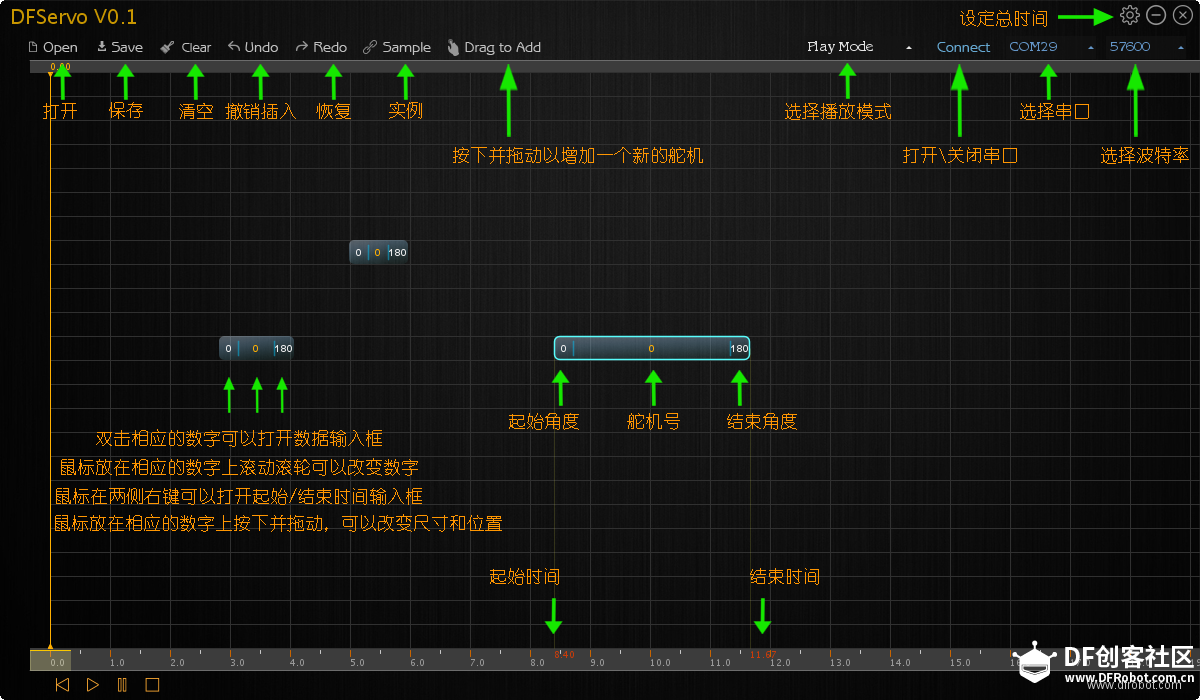 最后这里提供几种虫子运动的方式的截图(前进、跳舞、站立。希望小伙伴们能够玩出更多的花样)。运动的舵机设置文件在附件中。
【作品总结】 本次的作品在利用3D打印制作“虫子机器人”的机械结构,再通过舵机控制板实现了对“虫子”运动的控制,不过这次的虫子是联机版的,通过PC信号控制舵机。当然让“虫子”动起来只是第一步,后面可以继续拓展,例如在虫子上搭载各种传感器,并将数据上传或者返回。从而代替人去侦测环境数据等。 |

41.37 KB, 下载次数: 17305
四足模型
2.43 KB, 下载次数: 16743
四足运动设置



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






