|
12148| 9
|
[教程] 最炫海盗船 |
|
最炫海盗船 本例程为在原有4WD海盗船的基础上,用红外测距传感器替换了超声波传感器。功能上增加了MP3语音播放模块和灯带的效果。使得海盗船的应用更加的丰富。为体现改造的循序渐进,我们将改造过程分为以下四个步骤。同时对常用的灯带,MP3模块,红外测距模块的使用方法和注意事项做了整理和说明。希望能对大家有所帮助。 视频效果 改造步骤 Step1.灯带的焊接与测试。 Step2.MP3模块测试。 Step3.红外距离传感器测试 Step 4. 硬件的总装和程序的调试 总硬件清单 1.Pirate 4WD 机器人移动平台 x1 2.Romeo BLE 微控制器 (DFR0305) x1 3.DF05BB 标准舵机 (SER0020) x1 4.磁性 Micro-USB线 (FIT0351-OE) x1 5.杜邦线 (10根) (FIT0030) x1 6.炫彩 WS2812 LED灯带 x1 7.DFPlayer Mini 播放器模块 x1 8.红外距离传感器SHARP 2Y0A21 x1 备注:海盗船套件包含以上1~5项硬件。其中6,7,8改造所需硬件。 【Step1. RBG灯带的焊接与测试】 以三颗LED灯为一组对灯带进行裁剪。  拼接时留意选取灯带的正确方向 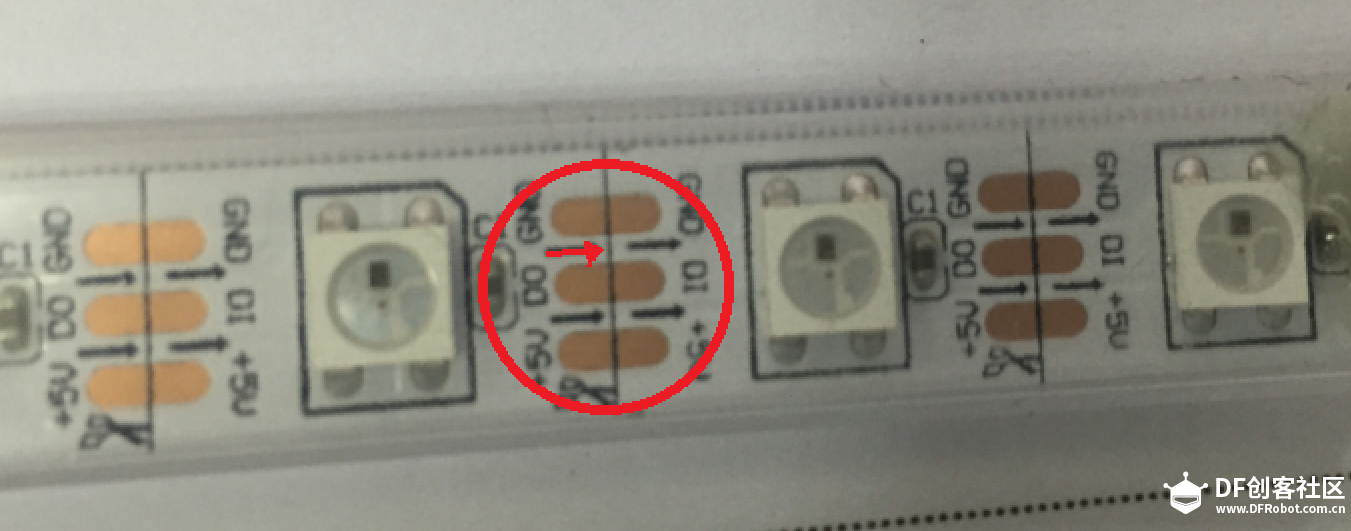 焊接,并用热熔胶封闭接口(防水) 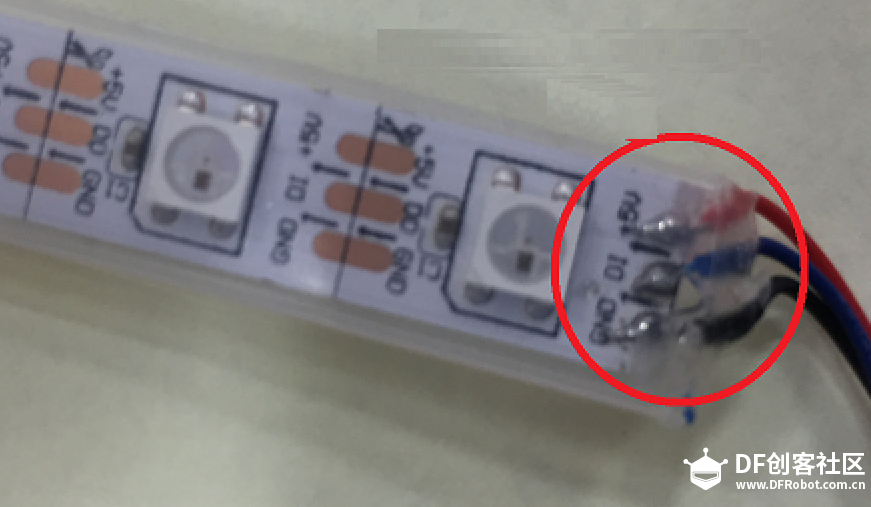 焊接后的效果 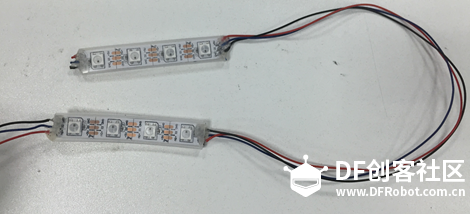 对灯带编号 从灯带上与控制板连接的第一颗LED算起,每三颗LED灯编为一组记作LEDs_0, 依次为LEDs_1, LEDs_2。 电路连线图:   灯带程序相关语句分析 语句1 :Color(uint8_t r, uint8_t g, uint8_t b) 说明:显示灯珠的颜色 (三个参数分别表示红,绿,蓝三色的亮度;取值范围是(0~255))如表示 红色:Color(255,0,0); 蓝色: Color(0,0,255); 紫色:Color(255,0,255); 为蓝色和红色的混合 语句2:setPixelColor(uint16_t n, uint32_t c) 说明:设置某一颗灯珠的颜色,其中n为灯珠的编号(第一颗灯珠为0,按顺序依次为1,2,3....), c为灯珠的颜色参数,即Color(uint8_t r, uint8_t g, uint8_t b) 测试效果 通过改变测试程序loop()中colorwipe()函数中的颜色参数c。来控制灯带颜色的改变。 例: 如果想使灯带显示红色,则 void loop(){ colorWipe(Color(255,0,0), 50); clear(100);} 小结: 在本段灯带的程序中,看似挺多行的代码。仔细一分析,会发现其他的语句都是为了在loop中执行colorWipe(strip.Color(255, 255, 0),50);即使灯带显示某一特定的颜色这一功能服务的。 |
|
本帖最后由 Boris_Liu 于 2015-8-4 11:39 编辑 【Step2. MP3模块的测试】 在使用MP3模块时需要注意两个地方。一是用虚拟串口这一工具,避免使用D0和D1串口。二是MP3音频的存放位置和命名方法。我们将在代码回顾中进行具体说明。 电路原理图  测试程序 测试时需导入mp3模块库  DFPlayer_Mini_Mp3.zip DFPlayer_Mini_Mp3.zip#include <SoftwareSerial.h> #include <DFPlayer_Mini_Mp3.h> SoftwareSerial mySerial(2,3); void setup() { mySerial.begin (9600); mp3_set_serial (mySerial); //set Serialfor DFPlayer-mini mp3 module mp3_set_volume (15); } void loop() { mp3_play (7); delay (500); mp3_play (1); delay(1000); } 代码回顾 代码:#include <SoftwareSerial.h> SoftwareSerial mySerial(2,3); // RX , TX 作用:调用“虚拟串口”库。使D2,D3口作为RX和TX进行UART通讯。 说明:对于RoMeo BLE控制板,在进行程序下载和蓝牙通讯时。其D0(DX) , D1(TX)端口会被占用。而DFPLayer mini模块如果是通过UART通讯方式工作的话,若也接入DO(DX), D1(TX)串口,则会出现程序无法通过USB端口烧写的情况。连接蓝牙也会出现同样的问题。 为此,我们在这里用了虚拟串口“SoftWareSerial”这一Arduino扩展库。SoftwareSerial库能让任意的数字I/O口进行串行通信。 代码:mySerial.begin (9600); mp3_set_serial (mySerial); 作用:设置波特率,为MP3模块配置UART串口。 说明:这里的mySerial 由前面的设定语句 SoftwareSeial mySerial(2,3); 配置,该模拟串口的名字可以自行定义。 代码:mp3_play (7); 作用:播放SD卡根目录中,MP3文件下,格式名为0007***的MP3文件 说明: 一.存放位置 音频文件应该放在“MP3”'它坐落在TF卡的根目录'文件夹中  二.音频文件的命名方法 mp3文件命名需要是4位数字,例如"0001.mp3",放置在mp3文件夹下。如需中英文命名,可以添加在数字后,例如"0001hello.mp3"或者"0001后来.mp3"。 小结 在MP3模块的测试程序中,看似挺多行的代码。仔细一分析,会发现其他语句都是为了在loop中执行mp3_play (7);即播放某一段mp3语音服务的。 |
|
本帖最后由 Boris_Liu 于 2015-8-4 11:39 编辑 【Step3. 红外线距离传感器的测试】 测试代码下载 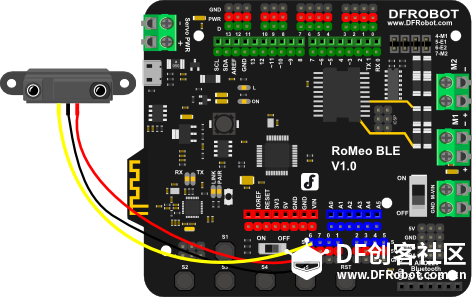 。红外传感器接入A6。 。红外传感器接入A6。电路图: 代码回顾 函数: uint16_t get_distance (uint16_t value) { if (value < 30) value = 30; return (((67870.0 / (value - 3.0)) - 40.0)/10); } 作用:将红外线传感器中传回的模拟量转化为距离。 在本款传感器的有效测量距离内10~80cm。模拟量转距离的公式为: Distance(cm)=(((67870.0 / (value - 3.0)) - 40.0)/10); 小结 在红外测距模块测试程序中,细心观察,会发现其他语句都是为了得到传感器的距离参数 get_distance(uint16_t value); 即探测到的实际距离。 |
|
本帖最后由 Boris_Liu 于 2015-8-4 12:17 编辑 【Step4.硬件的总装和程序测试】 灯带 和mp3 模块, 用泡沫双面胶固定在海盗船上方基板的下侧 。  总程序的下载(包含库) 总硬件电路图  部分接线图表
程序的测试 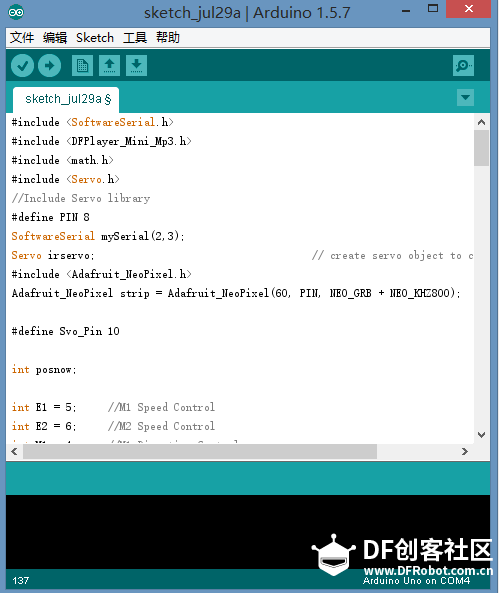 测试效果 小车启动后能顺利壁障,在执行后退命令时会有语音发出。同时小车在监测到前方无障碍物,左右两侧有障碍物三种不同的情况时,小车内灯带会显示不同的颜色。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







