|
43167| 29
|
[项目] 膝关节辅助装置电子部分 |

|
本帖最后由 hnyzcj 于 2016-1-14 16:00 编辑 膝关节辅助装置在上个月就发帖了,至于机械部分制作请看下面的连接。 https://mc.dfrobot.com.cn/forum.php?mod=viewthread&tid=13266 中间经过几个星期的测试制作,否定了原来用压力传感器作为检测装置的方案。继而采用了用PS手柄来控制膝关节辅助装置的方案。不过由于采用的舵机力量太小,使用中很难驱动人体腿部。所以我只有拍个空转的了。 http://www.tudou.com/programs/view/nLMJjjt4dn8   张禄看我的鞋子!!!啊哈哈 下面主要介绍下,电子部分制作。 器材: 32路舵机控制板 SONY PS手柄 多媒体集线器 缠绕环 舵机延长线 开关 制作机械部分:(略过) 三、电子部分 A.安装驱动 使用MINI-USB线连接上舵机板找到以下的驱动,这里可跳过安装。然后打开驱动程序的相对应的WINXP/WIN7_QSC舵机控制器(PL2303)驱动文件夹,根据不同的系统安装驱动程序。 B. 安装Microsoft.NetFramewoks2.0 如果已经安装了或者有高版本的NetFramewoks 文件可跳过安装,如果没有安装这个文件则打不开上位机软件,如果能直接打开上位机软件则可不安装此文件。WIN7或以上操作系统可直接跳过安装。 C.上位机软件介绍 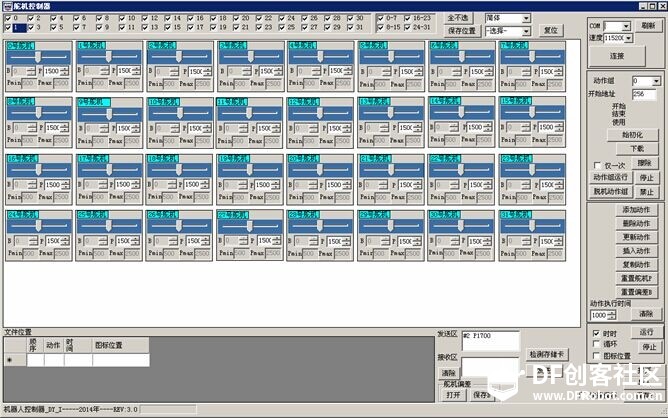 左边为舵机图标操作窗口,打钩显示该舵机口、取消就关闭该舵机口。右边为舵机图标位置保存窗口,舵机图标可自由拖拉,拖拉后保存位置。 D.COM口选择及舵机设置 默认通讯速度为高速模式115200 特殊情况下使用低速模式9600。如图所示COM口为4,速度选择115200。 舵机口指示条也随意拖动,B表示舵机偏差(默认为0),即舵机的相对位置为范围-100----100。P表示舵机位置(默认为中位1500)范围为500-2500。我们这里只使用了17口舵机设置如下。 E.舵机控制板供电、PS接收器、舵机连接方案 供电:确定自己使用的舵机的供电电压(一般舵机为5V-7.2V), 主板供电电压VSS为7V-12V。这里以QSC32E舵机板为例、QSC24E-MINI、QSC16E接线图。此种供电方案,用于7.4V电压的机器人舵机 且舵机数量较多的情况下。也是最稳定最理想的一种方案。 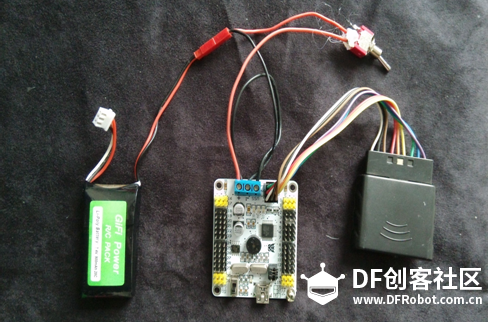 舵机测试: 注意主板的USB/PS2转换开关(32路板子)放置USB位置。在舵机口上接上一个舵机,例如接在17号舵机口(接这个地方便于测试上位机软件也便于测试摇杆)注意舵机板舵机排针接口的S + - 于 舵机线的对应,一般来说白红黑的线,白色接S 黑色接-。如果是黄红棕的线,黄色接S 棕色接-。只选择17号舵机号,然后左右拖拉17号舵机号,这个时候通讯指示灯D1会跟着同步闪动且舵机会跟着左右转。舵机测试完毕。 手柄接收器: 跟舵机板的PS2接口如图所示  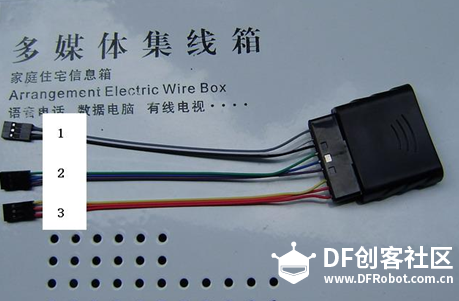 这是PS2接收器 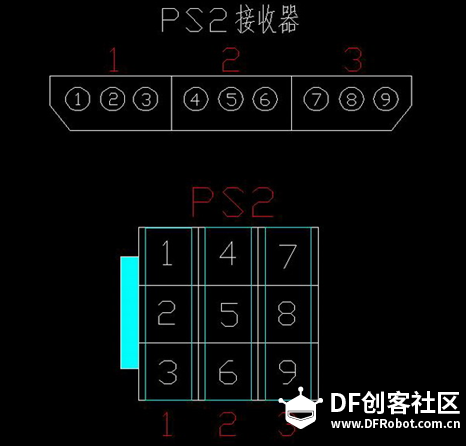 PS2接口9P线接口说明 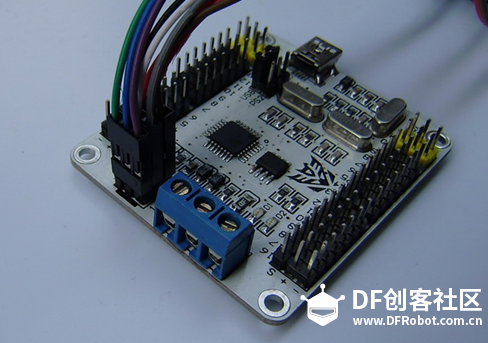 蓝色部分代表杜邦头金属露出口朝向,蓝色方框代表三个3P杜邦头竖着放置插的方向 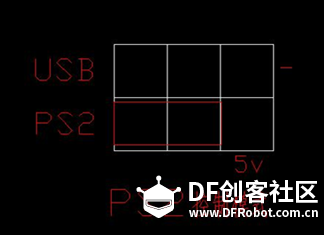 F联调: USB/PS2转换开关拨在PS2模式下,默认为动作组模式(按下按键执行动作组,松开按键停止动作组);第2种模式为6自由度单舵机微调模式(此功能可用于6自由度机械臂控制)0、1、2 16、17、18号舵机。我们这里使用的是第二种工作模式。模式切换:每按一次SELECT+START切换一次工作模式,先按下SELECT再按下START。听到一声清脆的“滴滴声”后,PS接收器灯不在闪烁是表明连接成功!如下图所示  此时按动手柄上的方框和圆形按钮就可以控制舵机转动了。  最后将舵机控制板,安防到控制板部分内部。3D打印的膝关节辅助装置固定在腿上,用你的手柄来测试下,对行走的帮助有多大吧。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






