|
7048| 0
|
【开箱评测二】RPLIDAR A2在ROS下测试 |
|
先确保安装好ROS,这里采用的indigo。建立一个catkin包,然后在其src目录下载rplidar的包: git clone https://github.com/robopeak/rplidar_ros 然后catkin_make编译。 直接执行roslaunch rplidar_ros view_rplidar.launch 会启动RVIZ,如下图: 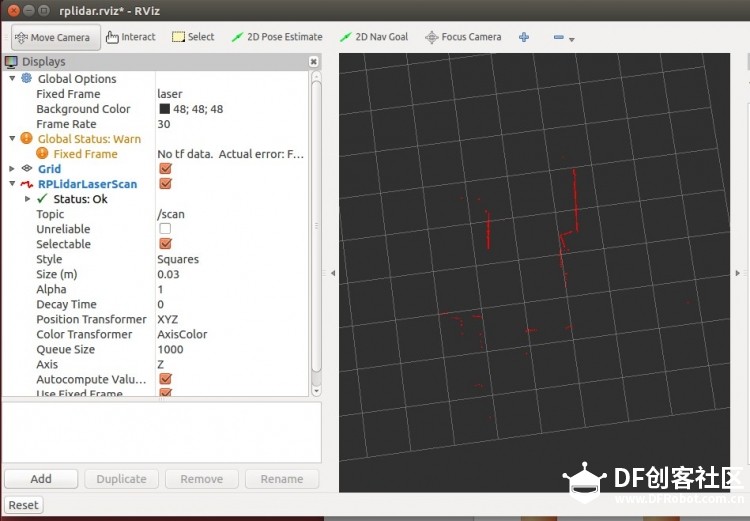 红色的区域代表有障碍物。终端显示如下,一切正常: 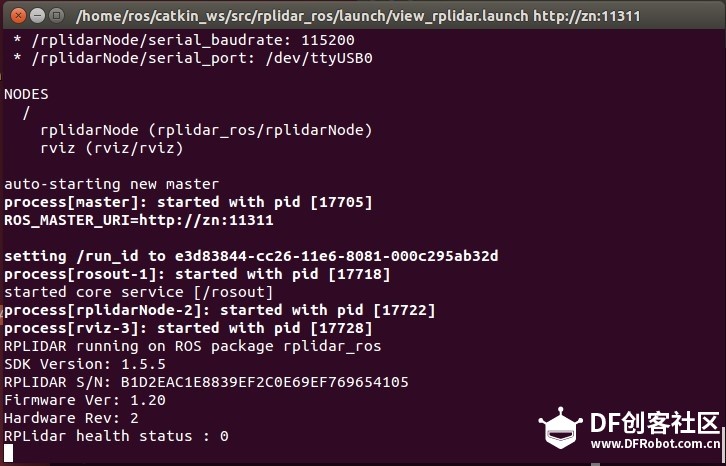 本文作者:Steven.Zhang (欢迎关注:http://www.rosclub.cn/) |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






