本帖最后由 Ricky 于 2014-5-8 14:10 编辑
- void stateUpdate(const float q_m){
-
- float q;
- float Pdot[4];
-
- /* Unbias our gyro */
- q = q_m - q_bias;
- /*
- * Compute the derivative of the covariance matrix
- * (equation 22-1)
- * Pdot = A*P + P*A' + Q //????????????
- *
- */
- Pdot[0] = Q_angle - P[0][1] - P[1][0]; /* 0,0 */
- Pdot[1] = - P[1][1]; /* 0,1 */
- Pdot[2] = - P[1][1]; /* 1,0 */
- Pdot[3] = Q_gyro; /* 1,1 */
-
- /* Store our unbias gyro estimate */
- rate = q;
-
- /*
- * Update our angle estimate
- * angle += angle_dot * dt
- * += (gyro - gyro_bias) * dt
- * += q * dt
- */
- angle += q * dt;
- /* Update the covariance matrix */
- P[0][0] += Pdot[0] * dt;
- P[0][1] += Pdot[1] * dt;
- P[1][0] += Pdot[2] * dt;
- P[1][1] += Pdot[3] * dt;
- }
上面一串问号开始到最后,不太懂。
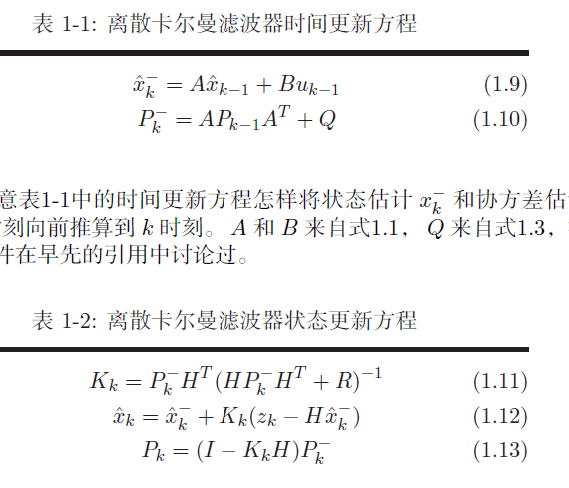
卡尔曼公式 (原文件名:QQ截图未命名4.png)
不是应该向上边1.10式那样么,那样直接就能算出协方差啊,怎么程序中还要先算出Pdot = A*P + P*A' + Q ,再P[0][0] += Pdot[0] * dt;来更新协方差?angle += q * dt;中的dt是积分求角度,可P[0][0] += Pdot[0] * dt;不知道怎么理解了。P.S.从“(equation 22-1)” 看出这个程序应该出自哪篇文章,找了好久没找到,谁知道发一下。谢啦!
| 


 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






