|
7268| 1
|
[AI2+IoT] 【MIT IoT官方教程03】陀螺仪 |
|
App Inventor + IoT:陀螺仪传感器app(Arduino101) 实验目标 使用App Inventor和Arduino101控制板上内置的gyroscope陀螺仪完成物联网应用。陀螺仪用来测量角速度(angularvelocity),即测量某个对象(Arduino)旋转的速度。 实验器材主控板:Arduino 101(内置陀螺仪) 打开ino文件 • 打开AIM- for –Things – Arduino 101.ino文件,将GYROSCOPE设置为ENABLED,其他所有的设置为DISABLED。 • 点击窗口上方的向右箭头,将代码上传到Arduino 101控制板中 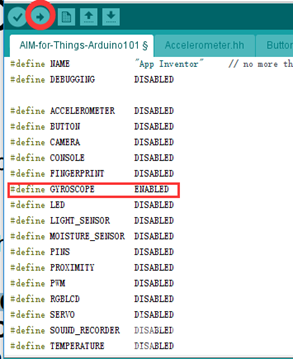 界面设置: • 在App Inventor中打开IoT_BaseConnect.aia项目文件并另存为IoT_GYROSCOPE • 从用户界面中拖动一个标签放到标签_数据和蓝牙列表之间 • 将标签重命名为标签_数据 • 设置其文本属性为"数据: " • 在组件面板中,点击Extension,导入插件 • 将Arduino101Gyroscope拖到工作面板中,并将其BluetoothDevice属性设置为BluetoothLE1  导入插件方法 • 方法1:将aix文件下载,选择“From my computer”导入 • 方法2:点击URL,直接将网址输入导入http://iot.appinventor.mit.edu/assets/resources/edu.mit.appinventor.iot.arduino101.aix 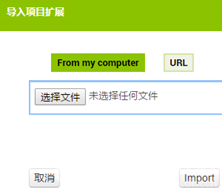 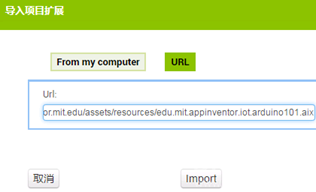 逻辑设计:当蓝牙连接成功后 • 标签显示为“已连接”,隐藏蓝牙列表,调用过程请求更新陀螺仪状态 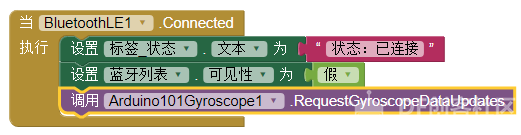 逻辑设计:定义变量 初始化变量"X_Angle"的"Y_Angle"为0,这两个变量用来记录陀螺仪当前角度的X和Y的值。  逻辑设计:定义过程更新数据标签 • 从过程抽屉中拖出定义过程块,并重命名为"更新数据标签" • 从标签_数据抽屉中拖出设置文本程序块 • 从文本抽屉中拖出合并字符串程序块,点击图中蓝色的扩展按钮,再添加3个“字符串”块到合并字符串中,并按图进行设置 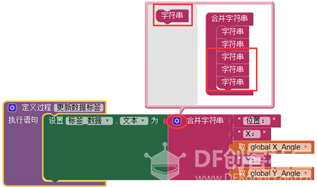 逻辑设计:当接收到陀螺仪数据时 • 将陀螺仪的X_Angle的值赋给全局变量X_Angle • 将陀螺仪的Y_Angle的值赋给全局变量Y_Angle • 调用过程“更新数据标签”,在标签中显示陀螺仪的X、Y的角度值 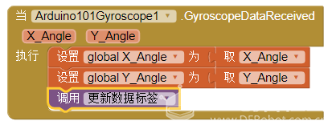 测试应用 • 蓝牙设备连接成功,显示“已连接” • 显示陀螺仪返回的当前X,Y的角度值 • 当晃动Arduino101时,X,Y的值都会发生变化  资料来源: http://iot.appinventor.mit.edu/assets/howtos/MIT_App_Inventor_IoT_Button.pdf |

213.95 KB, 下载次数: 0
.aia
17.87 KB, 下载次数: 0
.ino
edu.mit.appinventor.iot.arduino101.zip
59.6 KB, 下载次数: 0
.aix



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 版主限定
版主限定
 创作达人
创作达人
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 星球译员
星球译员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






