|
16128| 2
|
[HCRbot系列教程] HCRbot 系列 3──HCRbot 上位机 PC 端软件设置 |

|
这是HCRbot系列的第3篇。 下面是目前已经写好的所有篇章链接: 这一节主要讲 HCRbot 的PC端软件设置。 HCRbot 远程端 PC 采用的是 Ubuntu 16.04 LTS 的系统,所以对应的 ROS 版本为 Kinetic,下文不做特殊说明,都是在 Ubuntu 16 和 ROS Kinetic 上进行开发。 ## 安装 Ubuntu 及相关软件 ### 安装 Ubuntu 从下面的连接下载 Ubuntu 16.04 LTS: https://www.ubuntu.com/download/desktop 安装方法请参考下面的链接: https://www.ubuntu.com/download/desktop/install-ubuntu-desktop ### 更改 Ubuntu 软件源 由于国内的网络环境会导致 Ubuntu 下载软件或者更新比较慢,所以我们要更改 Ubuntu 的默认的软件源,提高下载速度。软件源文件路径为: /etc/apt/sources.list 。 针对教育网用户,参考中科大Ubuntu软件源,已为您准备好USTC中科大的软件源: sources_ustc.list ,请将 sources_ustc.list 复制到 /etc/apt/sources.list 目录下。 sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak sudo rm /etc/apt/sources.list sudo cp sources_ustc.list /etc/apt/sources.list 或者也可以直接在 Ubuntu 的 `Software & Updates` 软件里面修改,如下图: 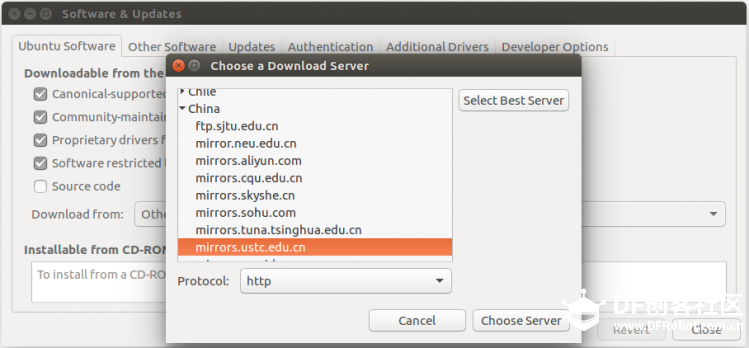 其他网络用户,可以参考[Ubuntu镜像源](https://wiki.ubuntu.org.cn/%E6%A8%A1%E6%9D%BF:16.04source-链接已失效)更改为其他的源。 最后执行更新: sudo apt-get update sudo apt-get upgrade ### 安装 SSH 安装 SSH 很简单,在终端执行下面的命令就行: sudo apt-get install openssh-client sudo service ssh start 然后就可以使用 SSH 了,是不是很简单! 更加详细的介绍以及安装方法,可以参考: Ubuntu下开启ssh服务:https://hahaya.github.io/ubuntu-start-ssh-service ### 其他软件 其他常用的 Ubuntu 软件,之后会有专门一个章节来讲解我自己常用的软件安装方法,这一节只关注 ROS 相关内容。 ## 安装 ROS 及相关包 ### 安装 ROS #### 方法一:一键脚本安装(推荐) 可以使用一件脚本安装: install_ros_kinetic.sh 。这个文件已经根据 turtlebot 3 上的 wiki 脚本做了一些修改,可以方便快速的安装 ROS 到你的电脑上。 wget https://raw.githubusercontent.co ... tall_ros_kinetic.sh chmod +x ./install_ros_kinetic.sh bash ./install_ros_kinetic.sh  等待安装完成,如果遇到错误,重新运行以上脚本就行。 注意:中间过程可能会让你输入密码,请根据提示输入密码。 这个脚本中设置了一些快捷键,方便后续 ROS 代码的编译,比如在终端中可以用缩写 cm 代替 catkin_make 命令来编译 ROS 包了。 #### 方法二:手动安装 可以参考 ROS 官方的安装方法,一步一步进行安装: ### 安装 HCRbot 的 ROS 依赖包 在后面的教程中,比如使用 Xbox 360 手柄去控制机器人运动,或者建图、导航等,会用到一些其他的 ROS 包,这里为了方便,就一次性安装了: wget https://raw.githubusercontent.co ... pendent_packages.sh chmod +x ./install_ros_dependent_packages.sh bash ./install_ros_dependent_packages.sh 具体安装了哪些包,可以参见 install_ros_dependent_packages.sh 文件。 ### 安装 rplidar_ros 包 rplidar_ros 是激光雷达 RPLIDAR A2 的 ROS 驱动包,通过这个包可以获得激光雷达的扫描数据。详细介绍请查看 ROS 官方 wiki:https://wiki.ros.org/rplidar cd ~/catkin_ws/src git clone https://github.com/robopeak/rplidar_ros.git cd ~/catkin_ws catkin_make ### 安装 RealSense ROS 包 这一步主要安装 RealSense R200 的 ROS 驱动包,参考官方 realsense_camera wiki,安装方法非常简单: [mw_shl_code=bash,true]sudo apt-get install ros-kinetic-realsense-camera[/mw_shl_code] 这一步安装成功的包,在驱动 R200 摄像头的时候可能会出现问题,根据官方 wiki 说明,需要 对udcvideo驱动打补丁。 具体操作可以参考上述 wiki。 ### 安装 hcr_ros 包 可以从我的 github 上下载 hcr_ros 包。这部份代码正在逐步完善和添加中,之后有时间我会添加更多案例代码进去。 cd ~/catkin_ws/src/ git clone https://github.com/chenzhongxian/hcr_ros.git cd ~/catkin_ws && catkin_make ## USB 权限与别名设置 我们在使用 USB 串口相关的包的时候,有时候会发现串口号不对,比如有时候串口号是 ttyACM0 ,有时候又是 ttyACM1 。如果每次去手动更改的话,很麻烦的,那有没有方法可以让他自动识别呢? 方法是有的,我们可以给每个连接串口设备一个别名,那么在 ROS 程序中,我们只要去连接这个别名就好。比如 OpenCR 这块开发板的串口号为 ttyACM* ,我们给他起个别名叫 opencr ,那么以后每次只要连接 opencr 的串口号就行了。 具体方法可以参考:Prevent modem manager to capture usb serial devices 这里我给大家提供了一种简便的方法,找到 99-opencr-cdc.rules 和 rplidar.rules 文件,执行如下命令: cp 99-opencr-cdc.rules /etc/udev/rule.d/ cp rplidar.rules /etc/udev/rule.d/ sudo udevadm control --reload-rules sudo udevadm trigger 上述命令分别给 OpenCR 板子和 RPLIDAR 设置了别名: opencr 和 rplidar 。 ## ROS 通信设置 我们将 ROS Master 运行在远程主机上。 [Remote PC] 编辑 .bashrc 文件: gedit ~/.bashrc 请将 ROS_MASTER_URI 和 ROS_HOSTNAME 中的IP地址设置为本机地址,如下图所示: 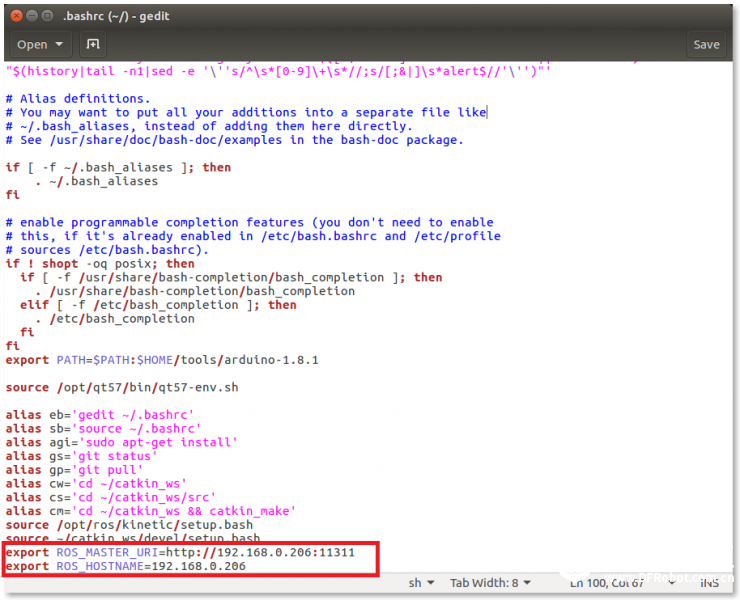 [Remote PC] source .bashrc文件: source ~/.bashrc 至此,远程上位机设置就结束啦。 ## 参考
未完待续…… |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 老版主限定
老版主限定
 创作达人
创作达人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






