|
19439| 9
|
[HCRbot系列教程] HCRbot 系列 2──HCRbot 硬件介绍与设置 |

|
这是HCRbot系列的第2篇。 下面是目前已经写好的所有篇章链接:
这一节主要讲 HCRbot 的硬件设计,包括所需的传感器、电路设计、结构安装等。 ## 物料清单 ### 机器人主体结构框架
 为了满足激光雷达的测距需要,我将 HCR 的第二层做了写改装,去掉了外围的超声波传感器支架。然后用 3D 打印做了几根白色的支架,可以看本节最后的效果图(好像颜色有点不搭……不过不要在意这些细节嘿嘿)。 ### 底层驱动
 ### 主控 SBC(Single Board Computer)
如果只用激光雷达做室内导航的话,选择 Raspberry Pi 3 就够了,毕竟最便宜。如果如果想要做视觉相关的项目的话,建议选择 Odroid XU4,如果你是土豪,可以用 TX1/TX2。 如果你用的是 ROS Indigo 版本,也可以用 NVIDIA TK1,价格跟 Odroid XU 4 差不多。 当然你也可以用正常的 x86 架构的 PC 电脑,考虑到体积因素,Intel NUC 也是一个不错的选择。 ### 主要传感器
如果只做室内导航的话,以上传感器选择其一就好,本人3个都玩过。如果想要做视觉相关的项目的话,建议选择 R200 或者 Kinect,当然你也可以选择其他摄像头。 这里有 ROS 支持的各种传感器,大家可以方便查看:https://wiki.ros.org/Sensor。 注意:RealSense R200 与 PC 或者 SBC 连接需要有 USB 3.0 的接口,所以想玩 R200 的需要选择带有 USB 3.0 接口的 SBC 或者 PC。 ### 其他配件
以上这些物品的介绍这里就不展开了,请查看相应链接。 想要玩 SLAM 的话,最低配置推荐 RPLIDAR A1 + Raspberry Pi 3。 ## 配置方案推荐 由于 HCRbot 采用模块化的设计方案,所以大家可以根据自己的项目需求,选择适合自己的配置,下面推荐几种配置组合方案。 当然所有的配置方案都需要 HCR 机器人、OpenCR 驱动板、威龙电机驱动等,下面的配置方案介绍只陈列不一样的部分,比如主控和传感器。当然,未来如果有时间的话,我会尝试用 Arduino Mega 来代替 OpenCR,毕竟 OpenCR 现在没有卖,而且相信到时候价格也不会便宜。而 ROS 方案中也有和 Arduino 通信的包,所以相信用 Arduino Mega 也是可以实现的,不过这是后话啦。 ### 基础版
这个配置应该差不多是做 SLAM 机器人的最低配置了,用 Raspberry Pi 对付激光雷达应该还是绰绰有余的,如果只是想体验一下 SLAM 机器人的话,推荐这个配置。 ### 进阶版
这个配置用来做视觉 SLAM 应该还是蛮不错的,相比 Raspberry Pi,Odroid 的处理能力提升了很多,可以用来做一些视觉方面的项目了。 ### 豪华版
这个配置的组合,可玩性就比较大了,既有激光雷达,又有摄像头,怎么发挥,就看你的想象力了,做一些 3D SLAM 应该可以勉强应付了。目前笔者就是采用了这个配置。 ### 土豪版 这个……就随你怎么配吧,反正怎么贵怎么来,比如可以吧 Odroid XU4 换成 NVIDIA TX1/TX2 等,把 RPLIDAR 换成其他更好的激光雷达等,反正我是没玩过,你们自己看着办。 ## 电路设计 接着来一张五毛特效的电路图吧,相(dan)信(yuan)大家都能看懂。 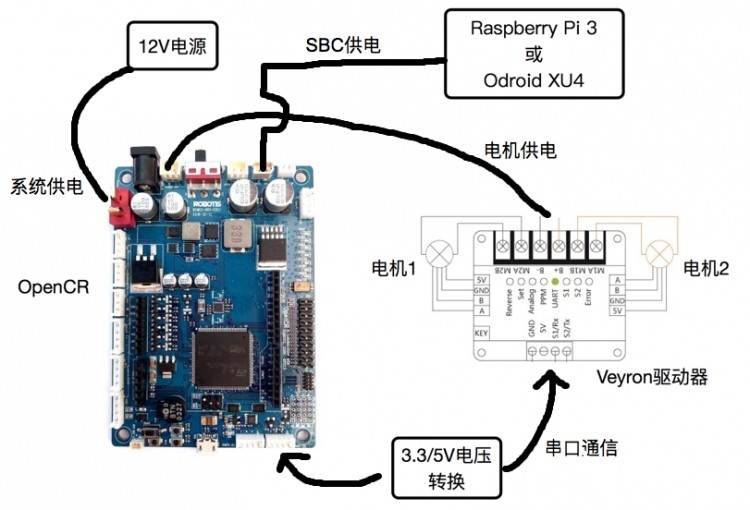 当然这里只是最基本的可以驱动 HCRbot 的电路图,如果你要加其他传感器,比如激光雷达,或者深度摄像头,相信电路部分难不倒各位读者。 ## 整体效果 下面就是 HCRbot 的实物图啦。为了测试不同的传感器和效果,我在上面装备了 Xbox Kinect、Realsense R200、RPLIDAR A2 等传感器;主控方面,底层驱动采用了 OpenCR;运行 ROS 的下位机采用了 Raspberry Pi 3 或者 Odroid X4,当然这两个二选一就好啦,追求性能或者要做图像计算的话,还是推荐 Odroid XU4。 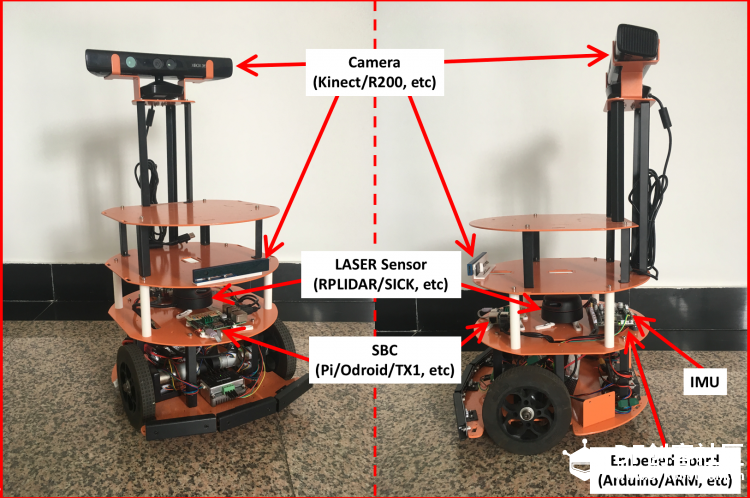 未完待续…… |
qwe143109 发表于 2017-12-10 19:44 HCR第二层原来放超声波传感器的支撑架被我拆掉了,因为会挡住激光雷达,所以我自己3D打印了几根柱子做支撑。只是起到支撑作用,同时减少激光雷达被遮挡的面积 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 老版主限定
老版主限定
 创作达人
创作达人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






