|
10263| 2
|
[项目] 给微波传感器加上警报 |

|
本帖最后由 gada888 于 2019-7-17 15:59 编辑 微波传感器传输稳定,能穿越一些材质。用处很大,只是个人在试用中需要一个声音的提醒,以便更有效率的测量物体。项目里加了5个不同频率的音频来替代本准备使用的单调音频。/////////////////////////// 项目使用的模块如下: 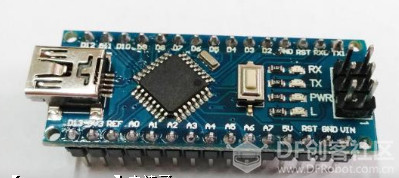 Arduino nano 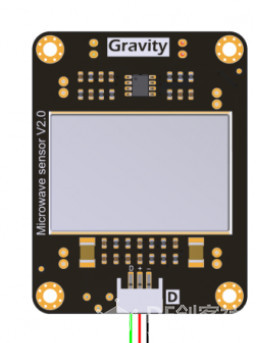 Microwave sensor微波传感器模块 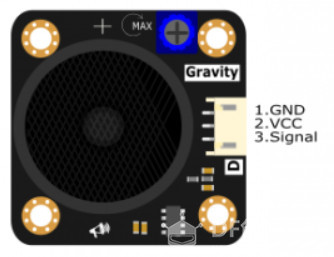 带功放喇叭模块Speaker //////////////////////////////////////////////////////// 主模块产品概述: 概述 微波运动传感器是利用多普勒雷达原理设计的微波移动物体探测器。不同于一般的红外探测器,微波传感器通过通过检测物体反射的微波来探测物体的运动状 况,检测对象将并不会局限于人体,还有很多其他的事物。微波传感器不受环境温度的影响,探测距离远,灵敏度高,被广泛应用于工业、交通及民用装置 中,如车辆测速、自动门、感应灯、倒车雷达等。 由于微波传感器检测对象存在普遍性,在实际的生活应用中,会搭配另一个传感器来做针对性的检测。如微波传感器+红外热释电传感器,能够有效的判断是 否有人经过,不会被阳光,被衣物颜色所干扰,也不会对其他物体产生反应。 特性 这种探测方式与其它探测方式相比具有如下的优点: 1. 非接触探测; 2. 不受温度、湿度、噪声、气流、尘埃、光线等影响,适合恶劣环境; 3. 抗射频干扰能力强; 4. 输出功率小,对人体构不成危害; 5. 探测距离远; 6. 支持对非生命类物体的检测 7. 微波的方向性很好,速度等于光速; 产品参数 工作电压 : 5V±0.25V 工作电流(CW): 60mA max., 37mA typical 尺寸: 48.5x63mm 发射参数: 探测距离: 2-16m连续可调(最小范围2m,最大范围16m) 发射频率 : 10.525 GHz 频率设置精度 : 3MHz 输出功率(最小): 13dBm EIRP 谐波发射: <-10dBm 平均电流 (5%DC) : 2mA typ. 脉冲宽度(Min.): 5uSec 负载循环(Min.): 1% 接收参数: 灵敏度(10dB S/N ratio)3Hz至80Hz 带宽: -86dBm 3Hz至80Hz带宽杂波 10uV ==================================== 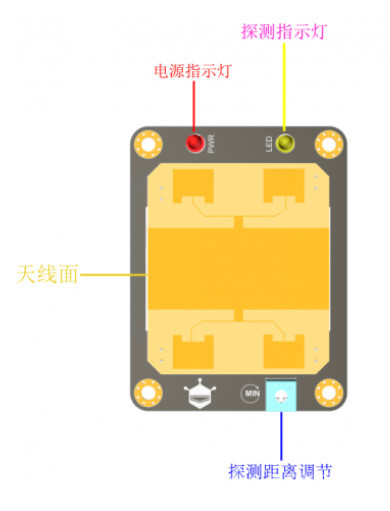 写的测试代码 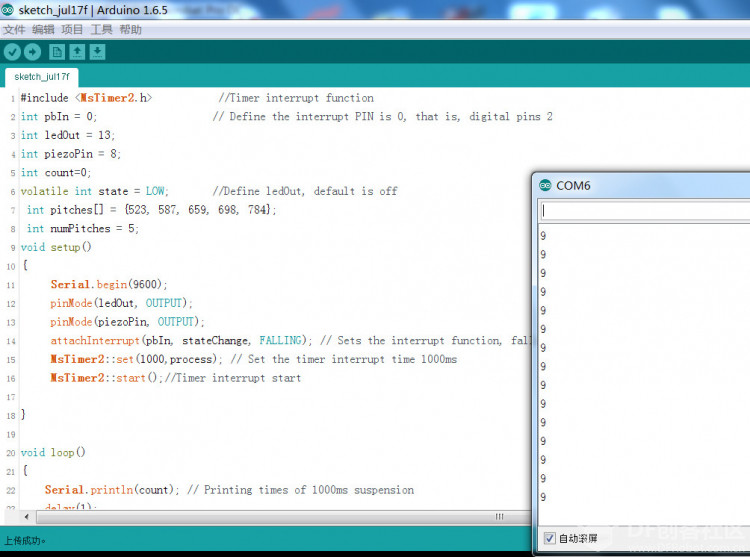 [mw_shl_code=applescript,true]#include <MsTimer2.h> //Timer interrupt function int pbIn = 0; // Define the interrupt PIN is 0, that is, digital pins 2 int ledOut = 13; int piezoPin = 8; int count=0; volatile int state = LOW; //Define ledOut, default is off int pitches[] = {523, 587, 659, 698, 784}; int numPitches = 5; void setup() { Serial.begin(9600); pinMode(ledOut, OUTPUT); pinMode(piezoPin, OUTPUT); attachInterrupt(pbIn, stateChange, FALLING); // Sets the interrupt function, falling edge triggered interrupts. MsTimer2::set(1000,process); // Set the timer interrupt time 1000ms MsTimer2::start();//Timer interrupt start } void loop() { Serial.println(count); // Printing times of 1000ms suspension delay(1); if(state == HIGH) //When moving objects are detected later, 2s shut down automatically after the ledout light is convenient. { delay(2000); state = LOW; digitalWrite(ledOut, state); //Turn off led int i; for( i=0; i<numPitches; i++){ tone(piezoPin, pitches, 200); delay(210); } } } void stateChange() //Interrupt function { count++; } void process() //Timer handler { if(count>1) //1000ms interrupt number greater than 1 is considered detected a moving object (this value can be adjusted according to the actual situation, equivalent to adjust the detection threshold of the speed of a moving object) { state = HIGH; digitalWrite(ledOut, state); //Lighting led count=0; //Count zero } else count=0; //In 1000ms, interrupts does not reach set threshold value is considered not detect moving objects, interrupt the count number is cleared to zero. } [/mw_shl_code] =================== 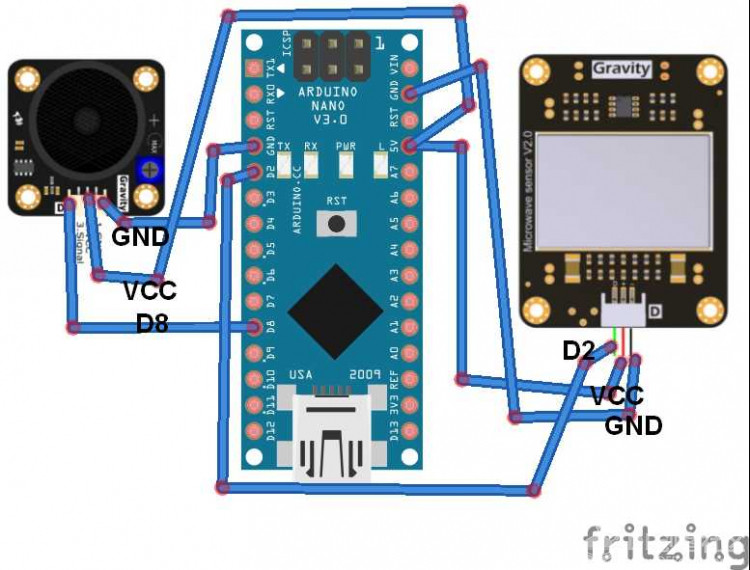 连线图 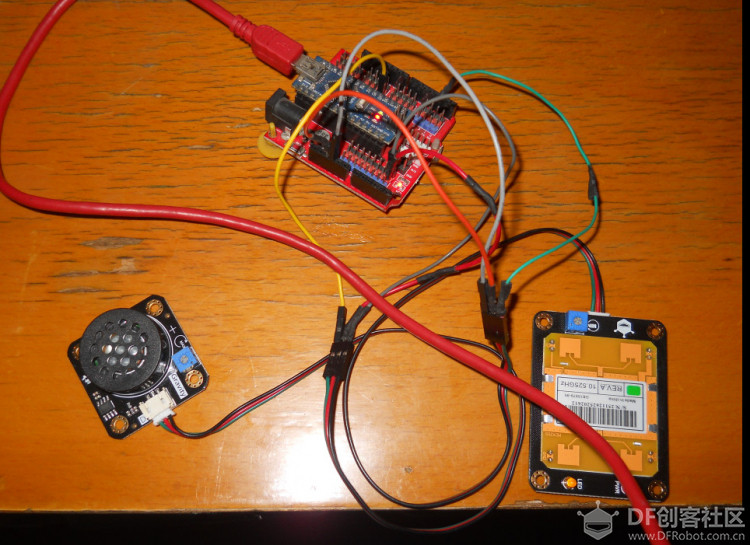 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 老版主限定
老版主限定
 创作达人
创作达人
 创客造
创客造
 编辑选择奖
编辑选择奖






