|
14113| 7
|
[高级教程] openMV机器视觉模块与麦昆小车(2)巡线的麦昆 |
|
本帖最后由 潘虹辉 于 2019-9-8 10:15 编辑 这是openMV机器视觉模块的第二篇 第一篇是openMV机器视觉模块与麦昆小车(1)追球的麦昆https://mc.dfrobot.com.cn/thread-297837-1-1.html 1、结构 这次把openMV装高一点然后大约45度斜向下方,安装好了如下图 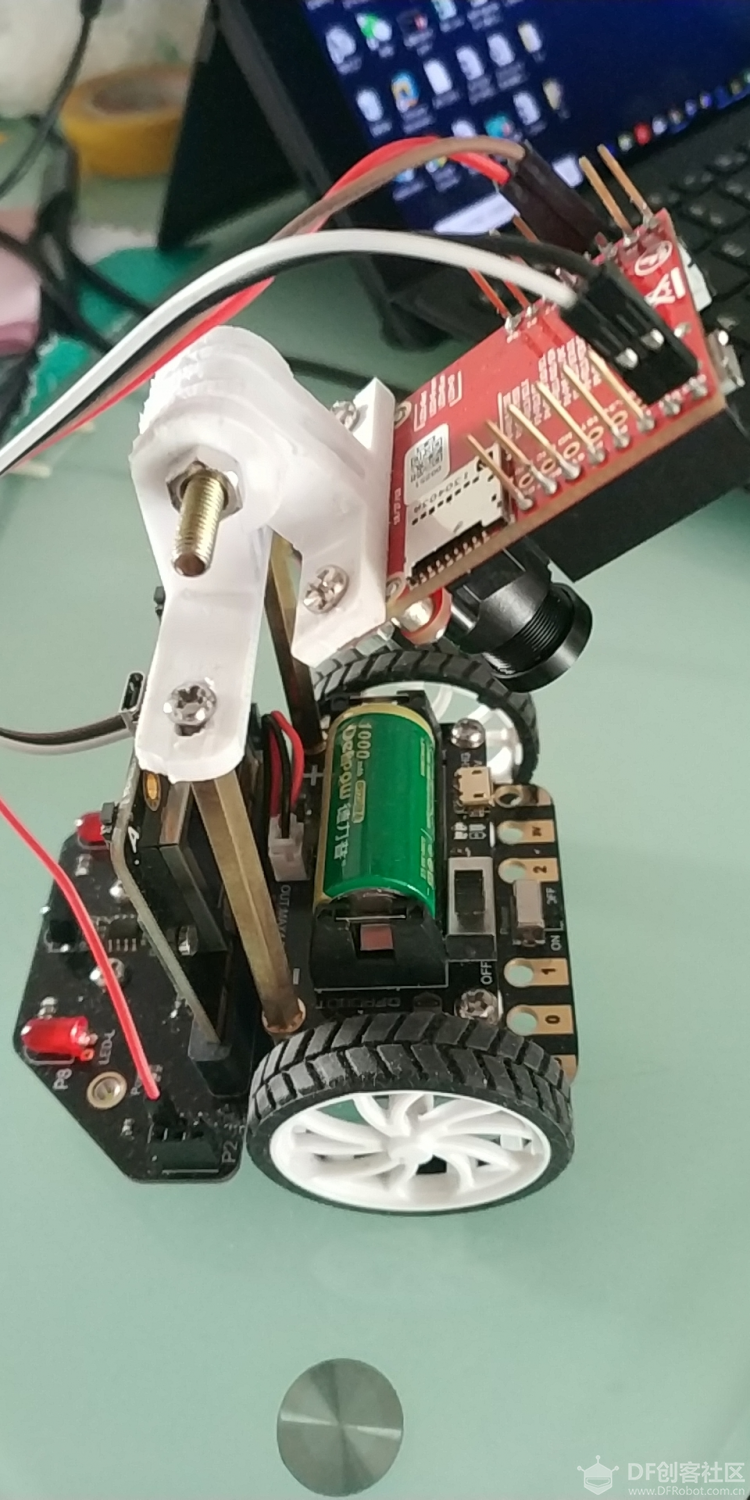 2、接线 小车 openMV GND GND + VIN p1(TX) p5(RX) p2(RX) p4(TX) 3、编程 首先是巡线的原理看下面的这个网址的视频https://singtown.com/learn/50037/ 简单的说是摄像头采集图像,通过图像处理将线的图像通过线性回归算法计算出一个直线line,计算出线的位置line.rho和角度line.theta。 通过计算位置与角度的误差值,然后算出相应的PID值,然后相加得出总的PID调整值,就是电机的速度左右调整值。 xunx.py代码如下: [mw_shl_code=python,true]THRESHOLD = (64, 100, -31, 29, 5, 127) # Grayscale threshold for dark things... import sensor, image, time from pyb import UART from pyb import LED from pid import PID rho_pid = PID(p=8, i=16) theta_pid = PID(p=1.5, i=3) uart = UART(3, 19200, timeout_char=1000) LED(1).on() LED(2).on() LED(3).on() sensor.reset() sensor.set_vflip(True) sensor.set_hmirror(True) sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QQQVGA) # 80x60 (4,800 pixels) - O(N^2) max = 2,3040,000. #sensor.set_windowing([0,20,80,40]) sensor.skip_frames(time = 2000) # WARNING: If you use QQVGA it may take seconds clock = time.clock() # to process a frame sometimes. while(True): clock.tick() img = sensor.snapshot().binary([THRESHOLD]) line = img.get_regression([(100,100,0,0,0,0)], robust = True) if (line): rho_err = abs(line.rho())-img.width()/2 if line.theta()>90: theta_err = line.theta()-180 else: theta_err = line.theta() img.draw_line(line.line(), color = 127) print(rho_err,line.magnitude(),theta_err) if line.magnitude()>8: #if -40<b_err<40 and -30<t_err<30: rho_output = rho_pid.get_pid(rho_err,1) theta_output = theta_pid.get_pid(theta_err,1) output = rho_output+theta_output uart.write("e"+str(int(output))+"\r") time.sleep(60) else: else: uart.write("null\r") time.sleep(60) pass #print(clock.fps()) [/mw_shl_code] mind+小车程序   请注意小车还是向后开的,所以左右和方向是反向的 4、要调整根据实际情况调整的参数有这几处 a、色块的阈值 在xunx.py的这句 THRESHOLD = (64, 100, -31, 29, 5, 127) 根据你的线的颜色调整,直到连线运行程序时看到的线是白色的,其它的基本是黑色的,方法看openMV的视频教程 b、PID参数 rho_pid = PID(p=8, i=16) theta_pid = PID(p=1.5, i=3) 小车巡线视频如下: |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶









