|
19521| 16
|
[项目] 用掌控板UDP网络遥控麦昆小车 |
|
本帖最后由 潘虹辉 于 2019-7-29 15:02 编辑 放假有点时间,学习掌控板的使用,一开始对蓝牙功能很好奇,但是没找到有关的资料(有大佬知道可以分享一吗?) 看到MIND+里有UDP网络服务模块,试了试,用它的通讯功能遥控麦昆小车。 1、硬件准备 UDP服务器:麦昆小车+锂电+掌控板 UDP客户端:盛思的掌控板+掌控宝套装 2、编程平台:Mind+ v1.5.6 3、编程首先选择“上传模式--Arduino C”,选择扩展中的掌控板-麦昆扩展板-WIFI和UDP网络模块 程序如下 UDP服务器(小车端): 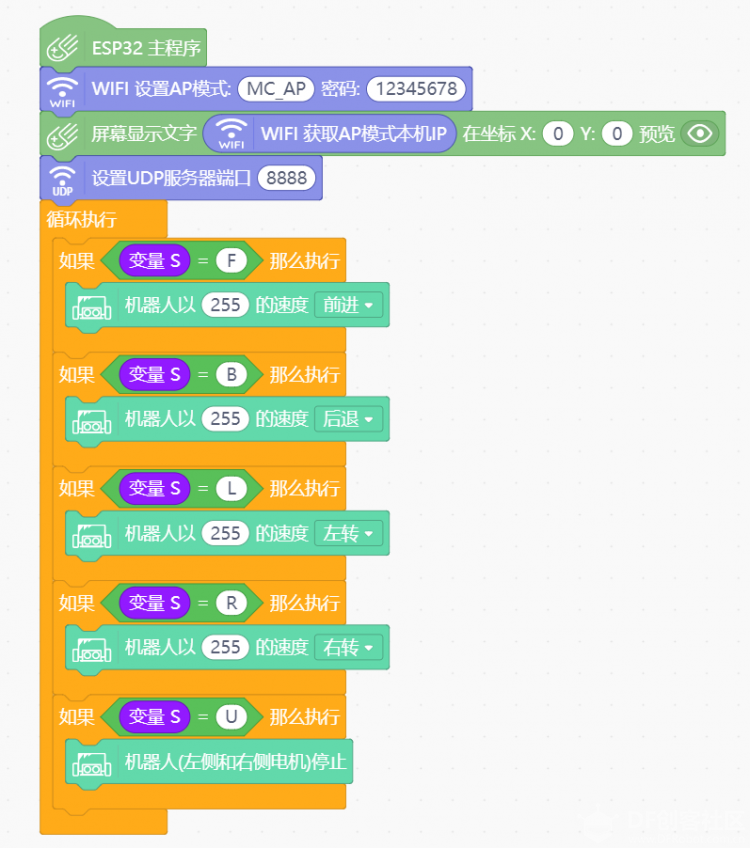  UDP客户端(控制端): 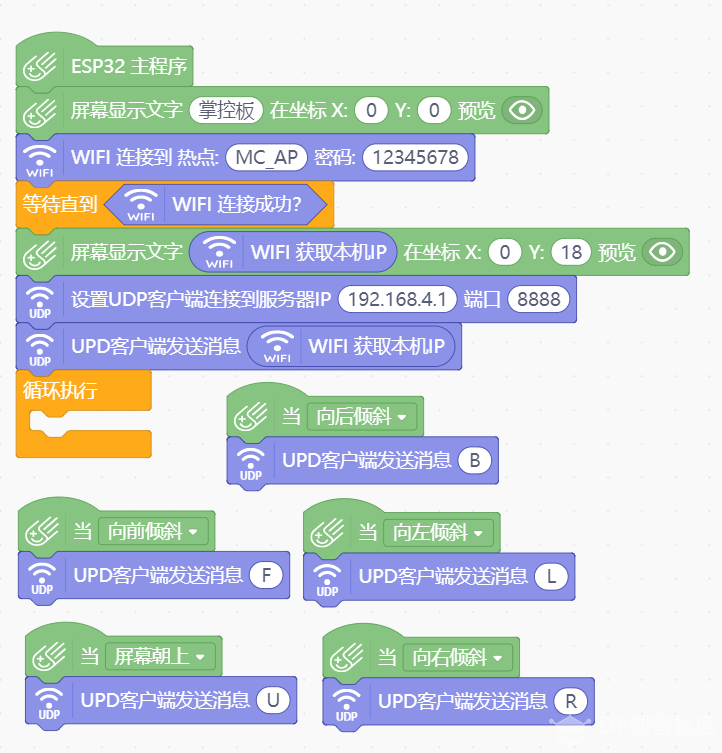 演示视频: 小结: 1、掌控板可以直接设置成WIFI的AP模式,其它的设备作为WIFI接入端接入,这样设置很方便。 也可以两块掌控板都作为接入端,接入现有的同一个SSID,这种方式UDP服务器的IP可能每次动态获得会变化,要改客户端的程序 2、UDP服务器和客户端是可以双向通讯的,所以也可以由遥控端当UDP服务端,小车端当UDP客户端。编程原理基本相同,只是服务端发送消息前要由客户端先发一个消息才能形成链接。 3、掌控板当做麦昆小车的主板时,经常出现供电不足的情况,一开始使用三节7号电池供电时,基本不能正常使用。 后来改用锂电池供电,当充电不足时,还是会出现电机前进后退等大电流负载动作时,主板重启。当电快用完时,WIFI不工作 4、当有多台小车要分别遥控时,只要设置不同的SSID,就可以分不同的通道遥控,这一点很方便 |

95.89 KB, 下载次数: 12465
MIND+源程序



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








