|
9706| 9
|
[入门教程] 【嘉年华展示】小MU|小麦昆视觉巡线--makecode&Mind+ |
本帖最后由 rzyzzxw 于 2019-10-9 15:49 编辑  嗨,大家好,我是人见人爱,花见花开的麦小昆。 国庆节那天,我和小主人一起坐在电视机前看大阅兵和国庆花车巡游。 当我在电视前观看阅兵式时,心中有许多复杂的情绪交织。 看着帅气可爱的兵哥哥兵姐姐们的飒爽英姿,以及看着各种先进武器,不禁感慨万千,十分自豪。 我是新时代的麦小昆,添加了小MU做装备,更具有了超人的能量。 我也要参加花车巡游,我要用视觉巡游。   器材准备: 人见人爱小麦昆 1https://www.dfrobot.com.cn/goods-1802.html 神奇慧眼小MU 1https://www.dfrobot.com.cn/goods-2003.html MU支架 1  MU折叠支架.zip MU折叠支架.zip一、组装与连接 小麦昆和小MU通过4pin PH2.0—杜邦线进行连接,虽然官方给出了IIC和UART两种接口,习惯性选择更灵活好用的IIC方式,同时小麦昆超声波后面也经集成了 IIC接口,貌似是“姻缘巧合”。 注意:选择IIC模式,需要将左侧的模式拨码开关1拨到下面,开关2拨在上面。 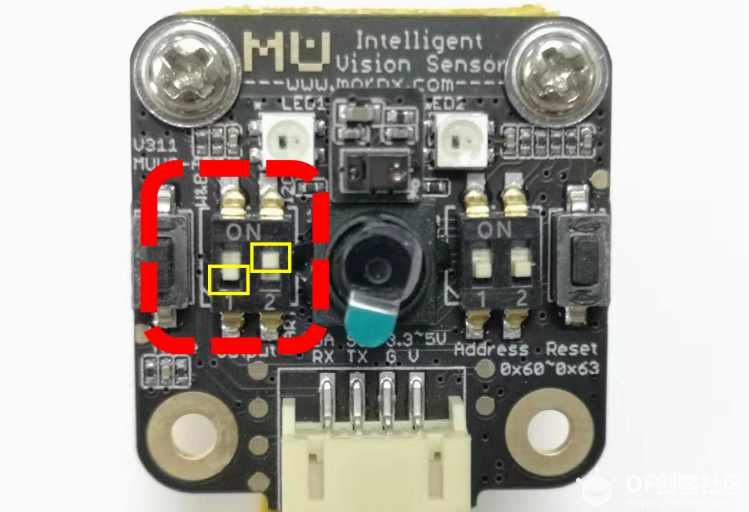 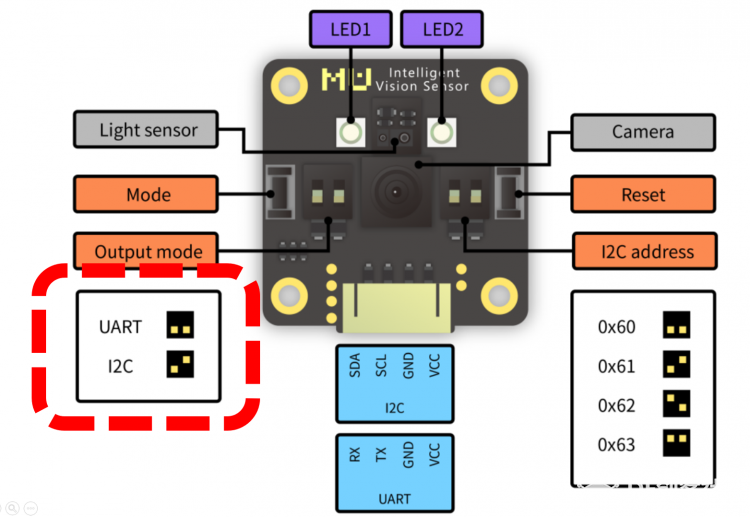 二、编程准备 研读小MU开发文档 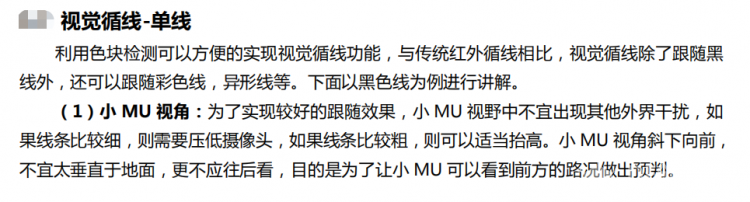 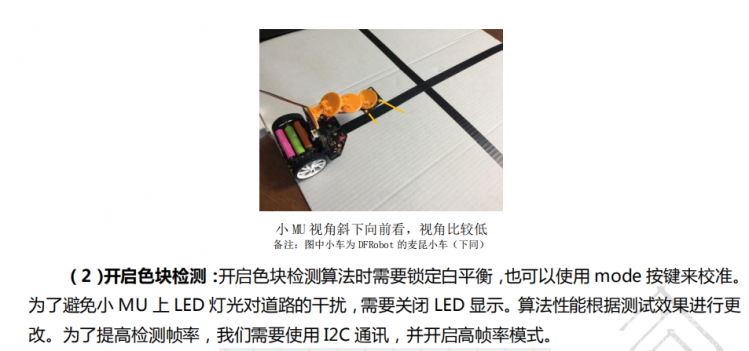 用makecode编程 1、 https://makecode.microbit.org 打开在线makecode,新建一个项目,点击扩展 搜索“mu-opensource/pxt-MuVisionSensorIII”,点击卡片完成添加小MU库  2、导入麦昆库:复制Maqueen库链接地址:https://github.com/DFRobot/pxt-maqueen 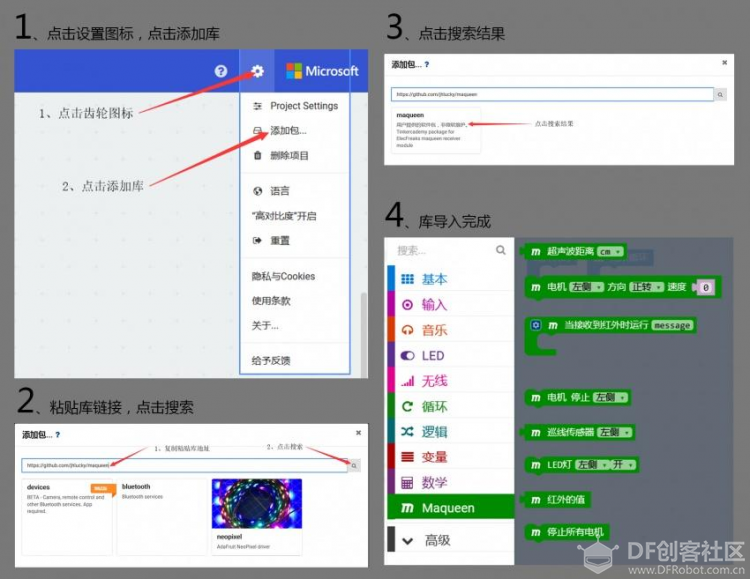 3、开机初始化配置小MU 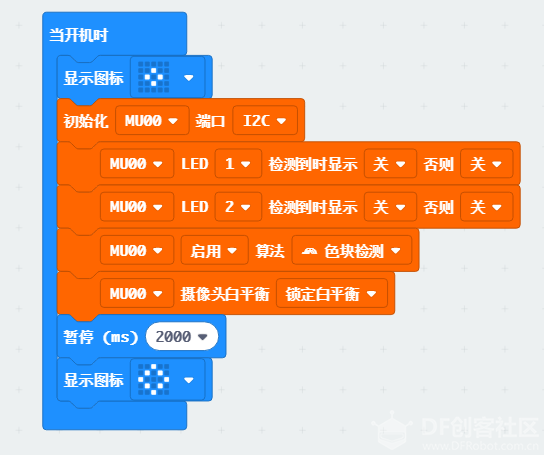 4、定义小车运动函数 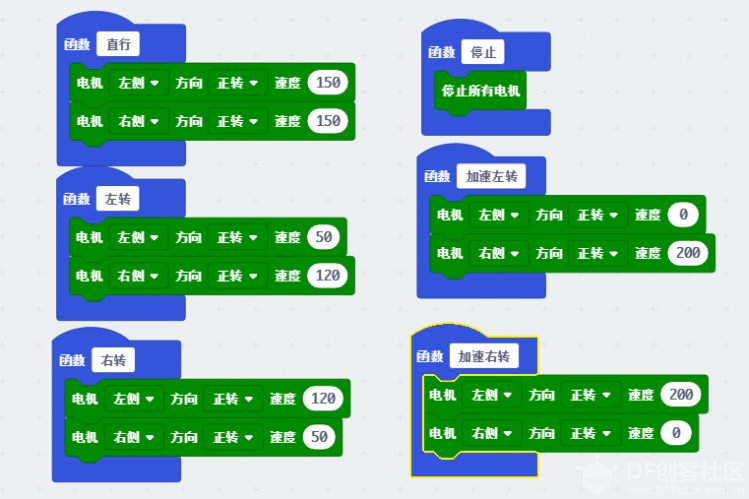 5、回过头继续研究文档,看看小MU视角【小提示:开机时对白纸进行白平衡锁定,要耐心调整高度和角度,实现正确的小MU视角】 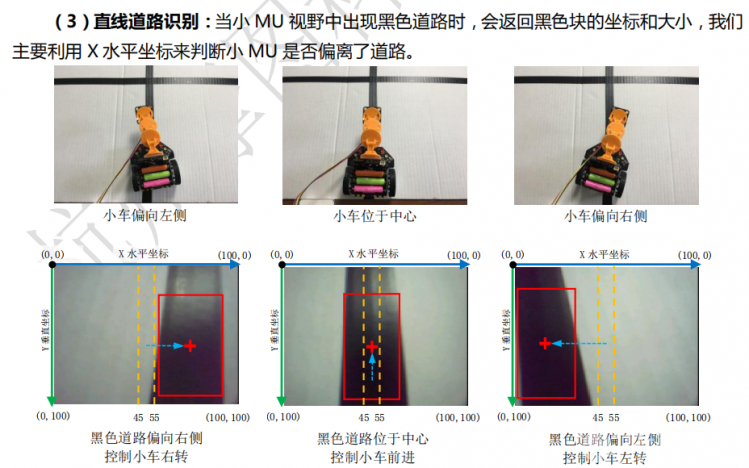 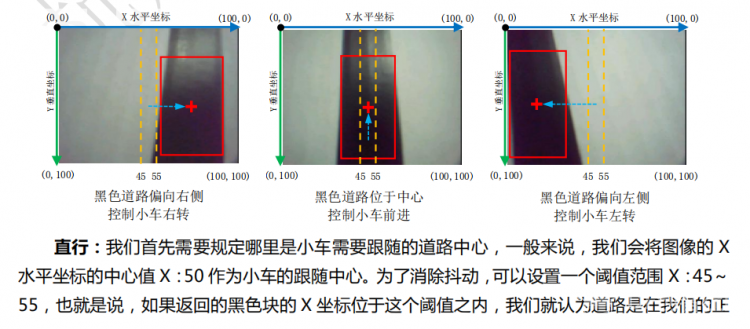 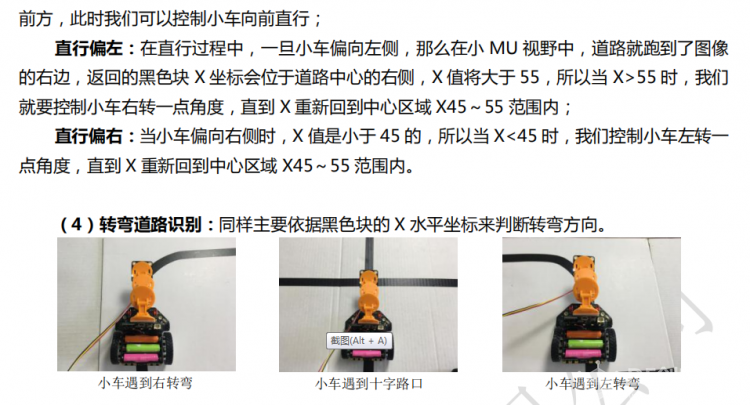 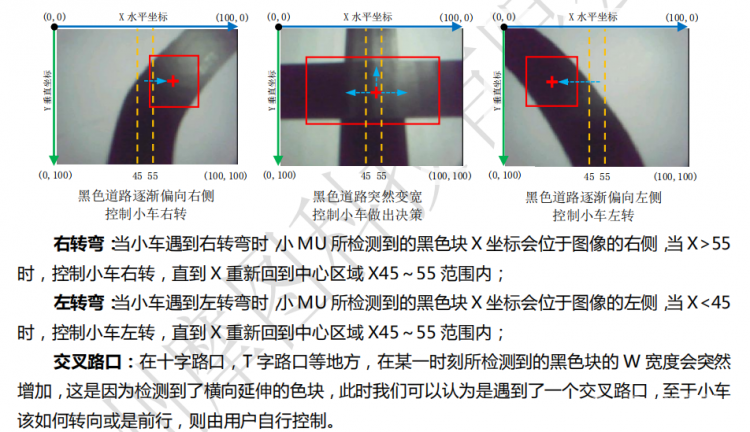 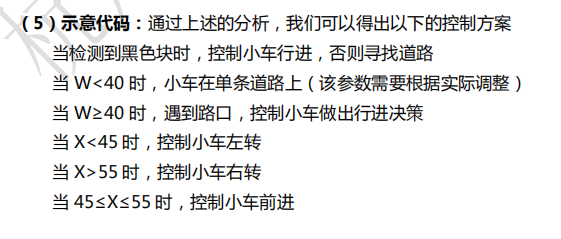 本项目中,我们要在交叉路口停车一段时间,其它路况寻线行进。 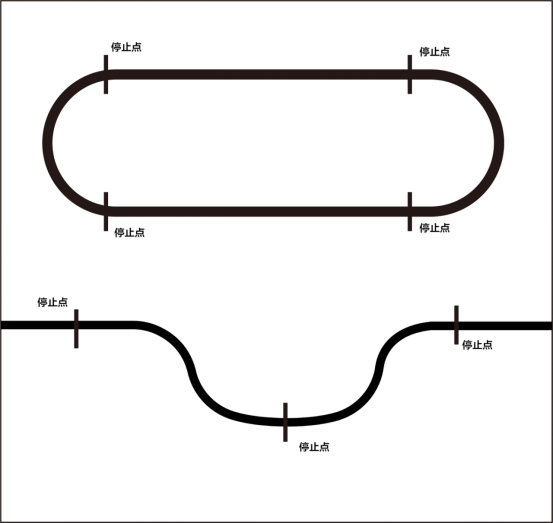 主程序为: 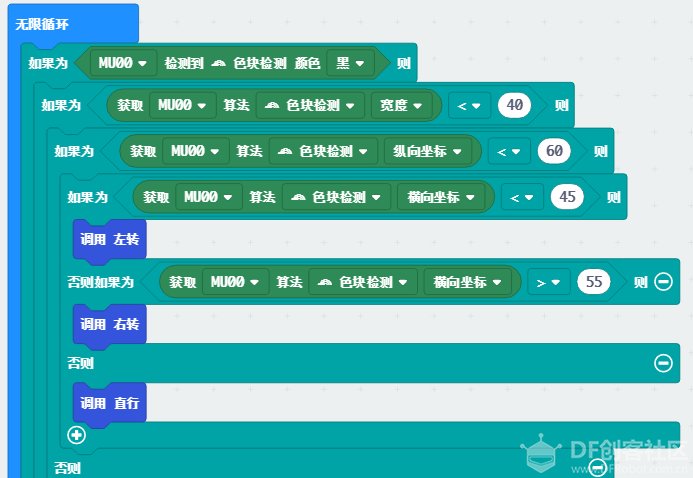 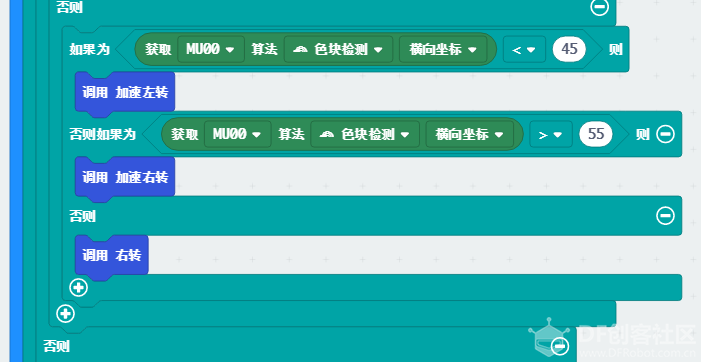 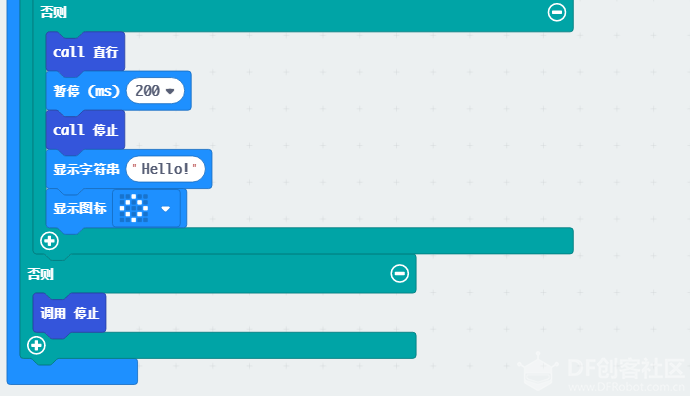 程序: https://makecode.microbit.org/_8a5i7uE3m7cq 三、用mind+编程 1、启动新版mind+V1.6.0(内测中,待发布),选择麦昆,添加小MU 2、初始化小MU配置 3、主程序 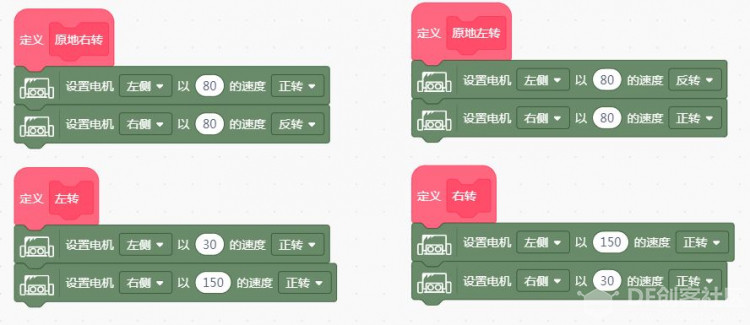  核心内容已完成。 两种方式完成了同一种效果。 四、小麦昆走方形 程序是在上面的基础上修改完成的,增加了路口转向功能。 程序修改后顺时针走方。 走方8字及复杂路线等要在后面进行尝试,你可以先试起来哦。 附件:  |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶




 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









