|
4559| 2
|
[项目] 智能管家 |
|
本文是基于mind+图形化编程制作的青少年科普项目,使用了MIND+里的“AI图像识别功能”。通过图像识别功能,可以进行人脸识别、人脸对比、常用物体识别、文字识别、车牌识别、手势识别、人体关键点识别等功能。结合之前的语音识别功能,制作的一个AI管家。初步设想了以下几个功能:首先在大门口,提醒用户进行人脸识别开门,人脸验证成功后,提醒用户测量体温,体温低于37.2℃则可以进入屋内,进屋后,可以语音控制管家进行一些基础电路的控制,比如冰箱门的控制、各个房间灯光的控制、大门的控制等。最近疫情严重,故增加了一个进门测量体温和出门提醒戴口罩的功能。 材料清单 1x掌控板1x掌控扩展板;1x红外温度传感器;1xArduino UNO;1xUNO扩展板;4xLED模块;2x舵机;1x人体红外热释电传感器 电路连接 2.人体红外传感器=====》Arduino # 5 3.LED4=============》Arduino # 6 4.Arduino # 2=========》掌控板 P15 5.Arduino # 3=========》掌控板 P14 6.Arduino # 7=========》掌控板 P16 7.LED1==============》掌控板 P8 8.LED2==============》掌控板 P9 9.LED3==============》掌控板 P13 10.舵机1=============》Arduino # 11 11.舵机2=============》Arduino # 10 程序设计 加载AI图像识别模块 1.切换到实时模式 2.打开扩展 3.切换到“网络服务”,加载“AI图像识别”,之后“返回”主界面 AI图像识别功能调用的百度AI服务,因此需要使用百度AI的账户。这里建议自己建立一个独立账户。 1.登录百度AI开放平台,http://ai.baidu.com,点击页面右上角“控制台”,然后“注册”或者“登录”自己的百度账号。 2.登录成功后进入控制台页面,点击左边栏“人脸识别”,在新页面中点击“创建应用”,将“语音技术”、“文字识别”、“图像识别”、“人体分析”全部勾选,(有些用不上,但是都可以勾选,可以多选不可少选)。 3.在“应用管理”中复制AppID、API Key、Secret Key下方的参数,填到Mind+中“切换至独立账户”中。 4.填好之后可以点击一下此积木,如果运行出错会提示错误信息,没有提示即为正确。 传感器工作原理:这里测量体温功能主要通过红外测温传感器来实现,MLX90614红外测温模块,通过探测物体红外辐射能量的大小和波长的分布来检测物体的表面温度。红外测温器由光学系统、光电探测器、信号放大器和信号处理及输出等部分组成。光学系统汇聚其视场内的目标红外辐射能量,视场的大小由测温仪的光学零件及其位置确定。红外能量聚焦在光电探测器上并转变为相应的电信号。该信号经过放大器和信号处理电路,并按照仪器内的算法和目标发射率校正后转变为被测目标的温度值。 产品参数: 型号:MLX90614-BCC 工作电压:3.3V-5V 工作电流:1.2mA 温度范围:-70.01℃至+382.19℃,分辨率0.01℃ 接口类型:IIC 接口线序:VCC,GND,SCL,SDA 尺寸:31.5mm×18mm  这时候,掌控板在人脸识别完成后会等待Arduino的信号,来判断是够控制舵机将大门打开。 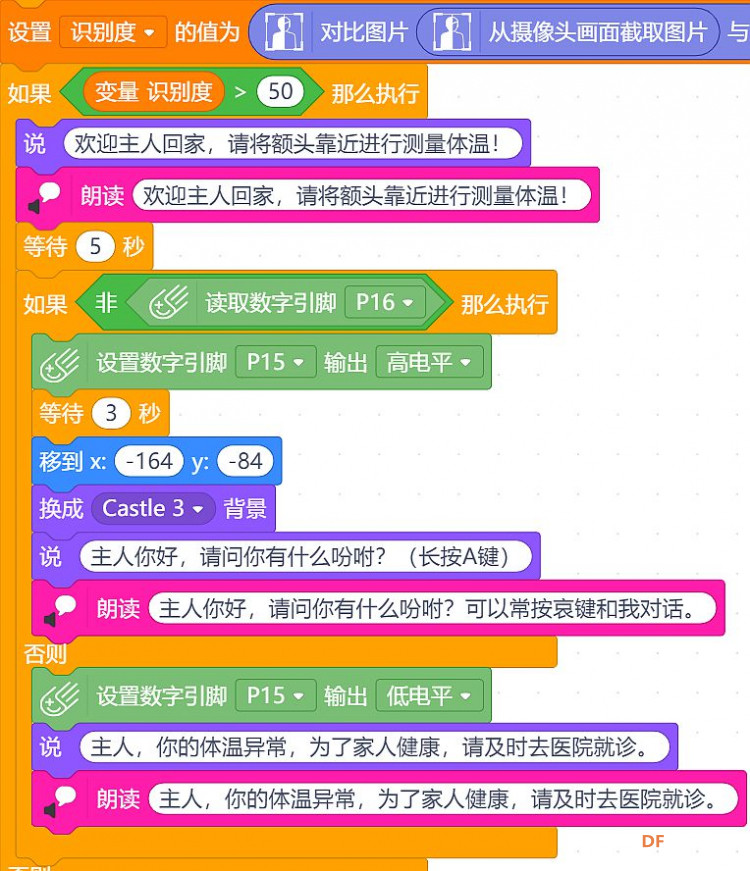 语音控制 语音控制外设工作,主要是根据上面的程序来进行修改,在每一个语音标签下面,增加硬件的控制就可以了。 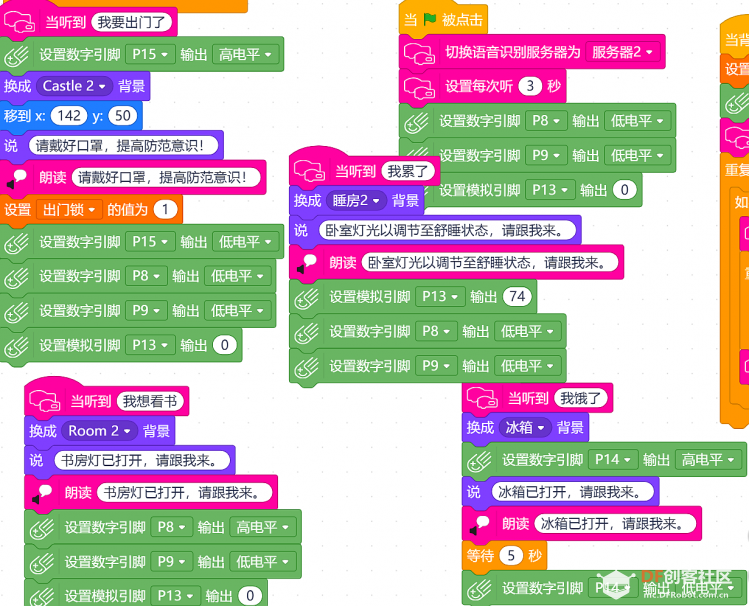 视频演示 文件下载  20200209.rar 20200209.rar |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






