|
7985| 2
|
[教程] 如何实现STM32和树莓派串口透传? |
|
最近做一个项目需要STM32和树莓派进行串口通信,实现原理如下: 第一步:使用USB转TTL分别调试STM32和树莓派的串口透传,确保可以通信; 第二步:确保第一步成功后,将树莓派和STM32连接,进行串口透传。 下面进行具体实验吧~ 树莓派环境串口透传在开始前说明以下几点: 1、树莓派UART端口的位置:TXD位于HEAD-8;RXD位于HEAD-10;GND位于HEAD-6(可选其他GND)。 2、树莓派的TXD应接USB转串口设备的RXD,当然如果测试失败请交换RXD和TXD的顺序。  树莓派串口通信需要配置环境,主要修改两处,具体如下: 第一处:进入 /boot/cmdline.txt 文件 输入以下指令: [mw_shl_code=c,false]sudo nano /boot/cmdline.txt[/mw_shl_code]删除以下部分: [mw_shl_code=c,false]console=ttyAMA0,115200 kgdboc=ttyAMA0,115200[/mw_shl_code]最终变为: [mw_shl_code=c,false]dwc_otg.lpm_enable=0 console=tty1 root=/dev/mmcblk0p2 rootfstype=ext4 elevator=deadline rootwait[/mw_shl_code] 第二步:进入 /etc/inittab 文件 输入以下指令: [mw_shl_code=c,false]sudo nano /etc/inittab[/mw_shl_code]注释最后一行内容: [mw_shl_code=c,false]#T0:23:respawn:/sbin/getty -L ttyAMA0 115200 vt100[/mw_shl_code]配置完之后便可测试一下树莓派的UART是否正常工作,而minicom便是一个简单好用的工具。minicom是linux/树莓派平台串口调试工具,相当于windows上的串口调试助手。此时需要先安装minicom: [mw_shl_code=c,false]sudo apt-get install minicom[/mw_shl_code]接下来启动minicom工具: [mw_shl_code=c,false]minicom -b 9600 -o -D /dev/ttyAMA0#-b代表波特率,-D代表端口,/dev/ttyAMA0 类似于windows中的COM1,-o功能暂时未知。[/mw_shl_code] 效果如下: 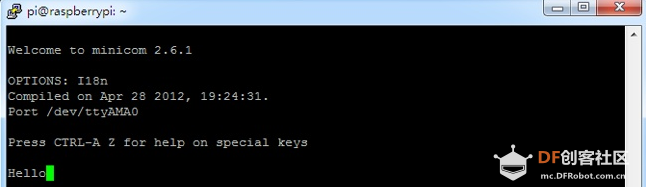 注意: 1、minicom发送内容直接在控制台中输入内容即可,如果minicom打开了回显可在控制台中观察到输出内容,如果回显关闭则控制台中没人任何反应,千万不要以为minicom没有正常工作。 2、minicom回显控制,先Ctrl+A,再E。可翻转回显状态(原来回显打开则此事回显关闭) 3、minicom回显关闭,先Ctrl+A,再Q。 minicom仅满足调试用途,如果需要编程解决问题那么python的serial扩展库——pyserial则是一个不错的选择。 收下需要安装pyserial扩展库,可使用pip或者easy_install安装,也可以直接选择apt-get工具安装。 [mw_shl_code=c,false]sudo apt-get install python-serial[/mw_shl_code]若使用apt-get工具安装,可输入以下指令: 当以上步骤成功后,就可以使用Python编写树莓派串口透传程序,具体Demo如下: [mw_shl_code=c,false]# -*- coding: utf-8 -*import serial import time # 打开串口 ser = serial.Serial("/dev/ttyAMA0", 9600) def main(): while True: # 获得接收缓冲区字符 count = ser.inWaiting() if count != 0: # 读取内容并回显 recv = ser.read(count) ser.write(recv) # 清空接收缓冲区 ser.flushInput() # 必要的软件延时 time.sleep(0.1) if __name__ == '__main__': try: main() except KeyboardInterrupt: if ser != None: ser.close()[/mw_shl_code] 此时实现了树莓派的串口通信功能。 STM32环境串口透传接下来实现STM32串口透传,这里我使用的MCU是STM32F103C8T6,配置UART1,STM32不需要配置环境直接在Demo中配置GPIO即可,将USB转TTL的TX连接STM32的RX(PA10),USB转TTL的RX连接STM32的TX(PA9),核心Demo如下: [mw_shl_code=c,false]#include "usart1.h" #include <stdarg.h> void USART1_Config(void) { GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(GPIOA, &GPIO_InitStructure); USART_InitStructure.USART_BaudRate = 115200; USART_InitStructure.USART_WordLength = USART_WordLength_8b; USART_InitStructure.USART_StopBits = USART_StopBits_1; USART_InitStructure.USART_Parity = USART_Parity_No ; USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; USART_Init(USART1, &USART_InitStructure); USART_Cmd(USART1, ENABLE); } void UART1SendByte(unsigned char SendData) { USART_SendData(USART1,SendData); while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); } unsigned char UART1GetByte(unsigned char* GetData) { if(USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET) { return 0; } *GetData = USART_ReceiveData(USART1); return 1; } void UART1Test(void) { unsigned char i = 0; while(1) { while(UART1GetByte(&i)) { USART_SendData(USART1,i); } } }[/mw_shl_code] |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 ARD DAY
ARD DAY
 创客造
创客造
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖






