|
25328| 0
|
[教程] 基于ArduPilot开发无人机飞控自动驾驶仪 |

本项目基于开源飞行控制固件 ArduPilot 开发,设计并实现了一款高度集成的 自动驾驶仪,可广泛应用于多种平台,包括但不限于 多旋翼、固定翼、直升机、垂直起降(VTOL)飞行器、无人车、无人船及潜水艇。该自动驾驶仪具备强大的功能,支持多种飞行模式和任务,适合用于巡航飞行、植保作业、远程侦察、测量作业等多种应用场景。项目的复刻难度较高,但功能强大且灵活,适合DIY爱好者进行技术学习和应用拓展。 
1、项目参数
2.1、主控与协处理器架构 采用 STM32H743 主控芯片,具备强大的计算能力和丰富的外设接口,能够处理复杂的飞行控制算法和数据处理任务。 STM32F103 协处理器负责PWM输出、Failsafe机制和一些低功耗操作,确保飞行器在发生故障时能够自动执行应急程序。 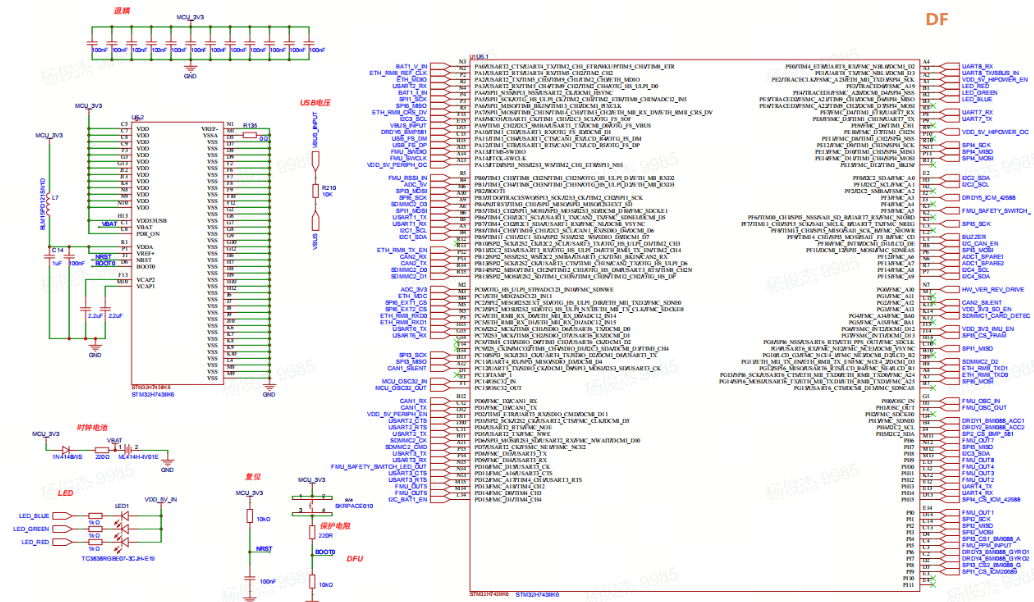 BMI088、ICM42688-P、ICM20689 作为飞行器的核心惯性测量单元(IMU),提供高精度的运动数据,确保飞行稳定性。 BMP581、ICP-20100 气压计模块,提供精确的高度数据,并能应对复杂的环境条件。 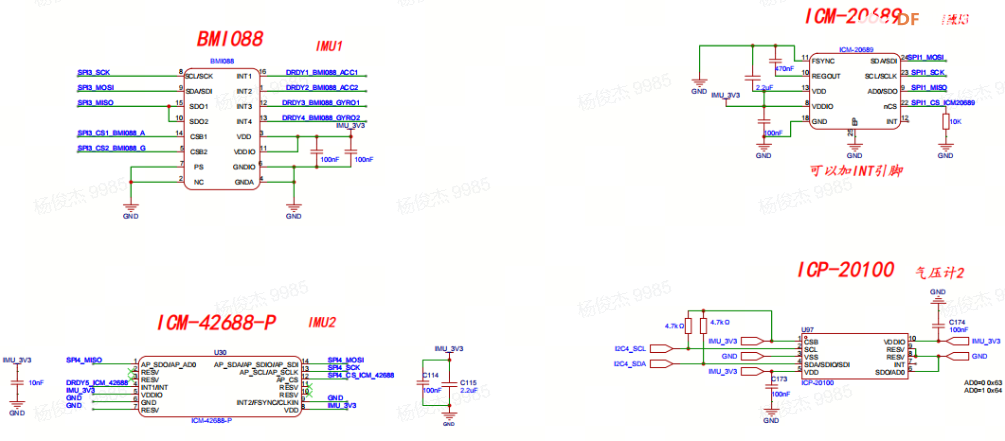 集成 FM25V05 或 FM25V02 非易失性存储器,用于存储飞行参数、配置和日志数据。即使系统断电或重启,飞行数据也能保留。 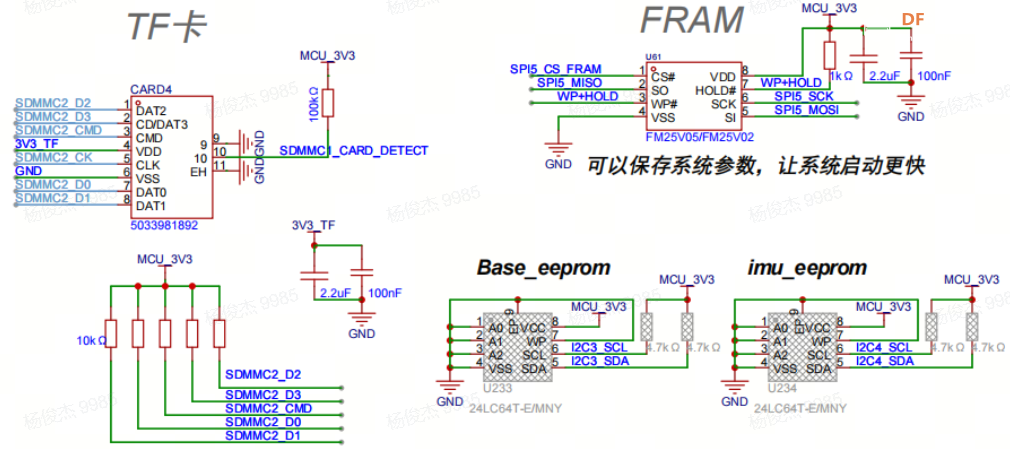 多路降压电源管理模块,确保各个系统组件稳定供电,避免因电源波动导致系统故障。 集成 AP2311FGEG-7 功率控制保护电路,保证外设和传感器的稳定供电,避免电压过低导致的设备损坏。 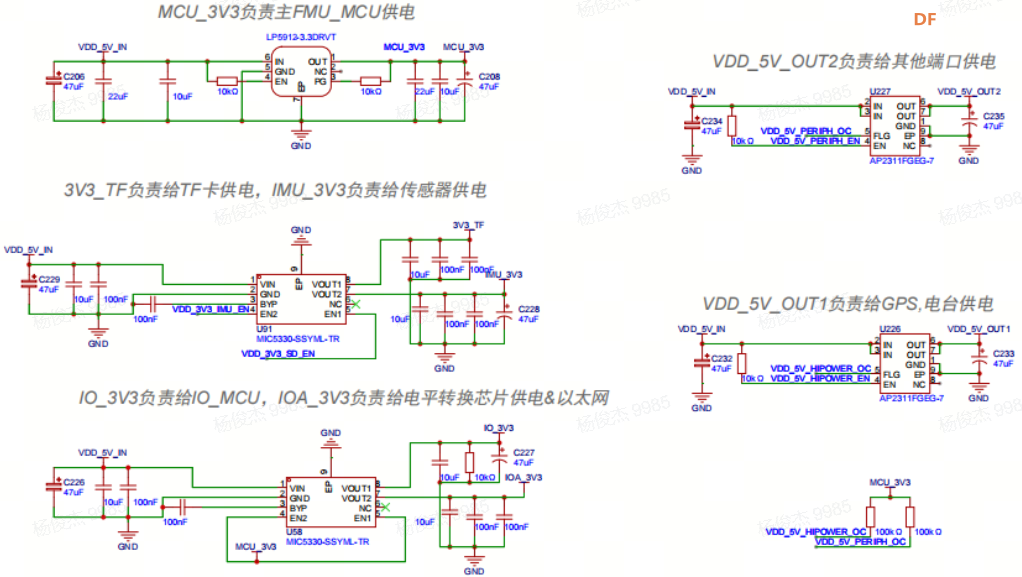 该设计支持多种标准通信接口(SPI、I2C、CAN、UART等),使得用户可以轻松集成各种传感器、外部设备及扩展模块。 高速CAN总线支持高效数据传输,并可以根据需求切换到低速模式。 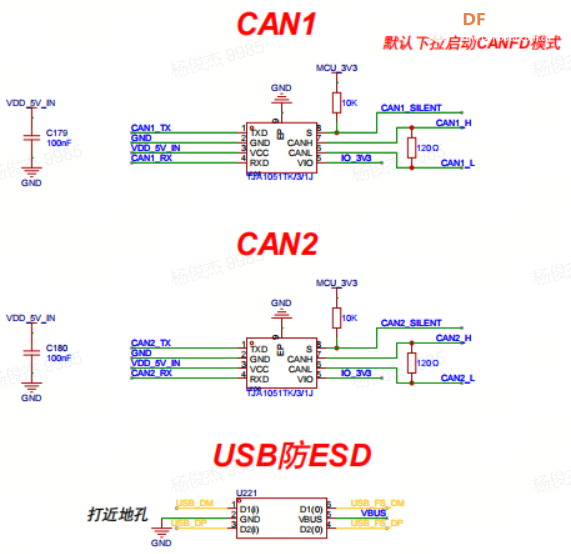  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 ARD DAY
ARD DAY
 创客造
创客造
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖






