超声波测距
准备
硬件:
- FireBeetle-EPS32 × 1
- URM07-UART单探头超低功耗超声波测距传感器 × 1(点击查看模块详情)
点击购买
- SD卡 × 1
软件:
代码位置:
- File → Examples → Measure → urm07Demo.py
- 引用模块:uPy_lib → urm07.py
实验步骤
-
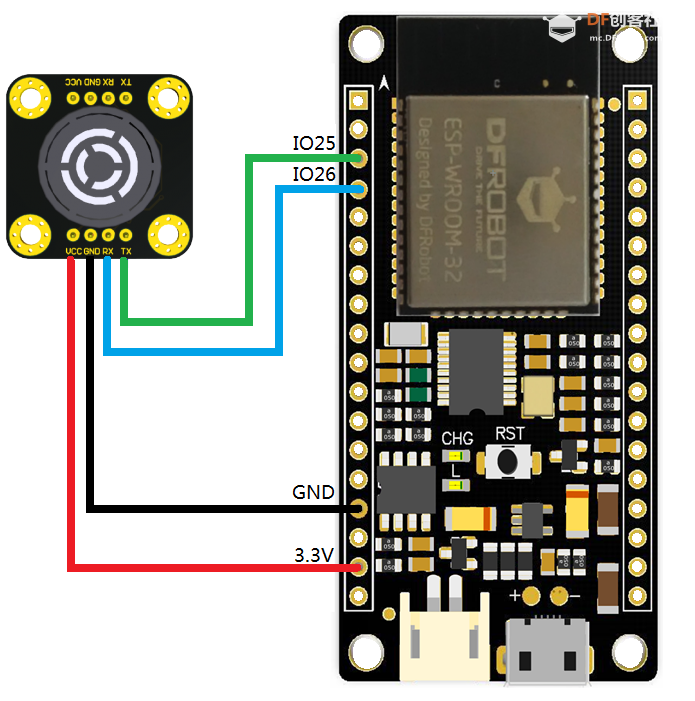
硬件连接如下图所示
-
将uPy_lib目录下的 urm07.py 文件拖动到device目录下,如下图

-
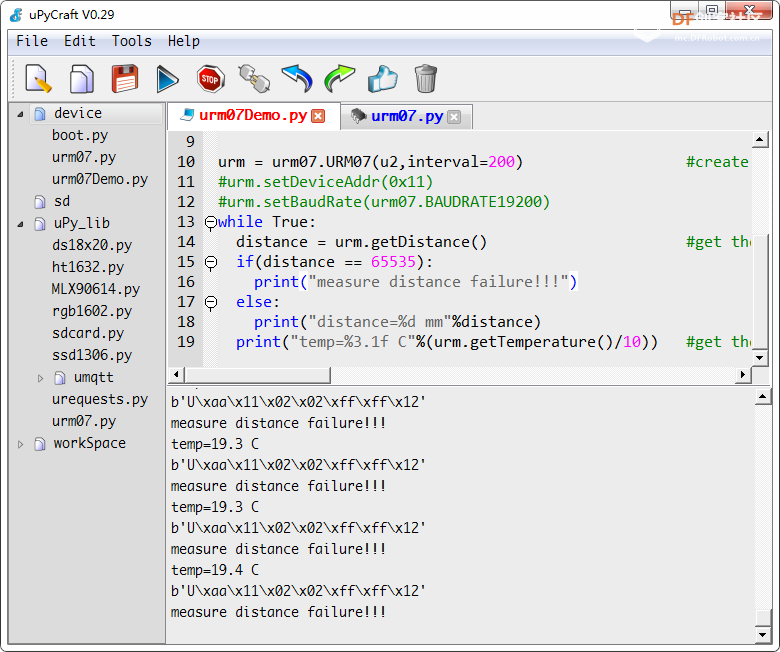
下载运行 urm07Demo.py 文件,具体代码如下
#硬件平台:FireBeetle-ESP32
#实验效果:这个实验用于20-750cm距离测量和温度测量。
#硬件连接:本实验需要外接一个'URM07'声波测距传感器,通过串口通讯,IO25(RX)、IO26(TX)。
#下面的信息显示,对于当前版本,urm07Demo是可用的。
# IO0 IO2 IO4 IO5 IO9 IO10 IO25
# IO26 IO39 IO12~19 IO21~23 IO34~36
from machine import UART
import urm07
import time
u2 = UART(2, baudrate=19200, rx=25, tx=26, timeout=10) #创建一个串口对象,并设置波特率、rx引脚、tx引脚,超时时间
time.sleep(1)
urm = urm07.URM07(u2, interval=200) #创建一个urm07对象并传入串口对象和等待urm07回复数据的时间
#urm.setDeviceAddr(0x11)
#urm.setBaudRate(urm07.BAUDRATE19200) #设置设备波特率
while True:
distance = urm.getDistance() #从urm07获取距离
if(distance == 65535): #获取失败
print("measure distance failure!!!")
else: #获取成功
print("distance=%d mm"%distance)
print("temp=%3.1f C"%(urm.getTemperature()/10)) #获取放大了10倍的温度(℃)并显示
实验效果
urm07.py库API说明
类 — URM07
- class URM07(uart, addr=0x11, interval=200)
uart:创建的UART对象
类函数
- getDistance() 函数功能:获取距离。
- getTemperature() 函数功能:获取温度(摄氏)
- setDeviceAddr(newAddr) 函数功能:设置传感器地址。
newAddr:新的设备地址
- setBaudRate(baudrate) 函数功能:设置波特率。
baudrate:波特率
| 


 沪公网安备31011502402448
沪公网安备31011502402448

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员






