|
35467| 0
|
[项目] Nvidia Jetson Xavier 开机配置+刷机+部署ROS(刷机需谨慎) |

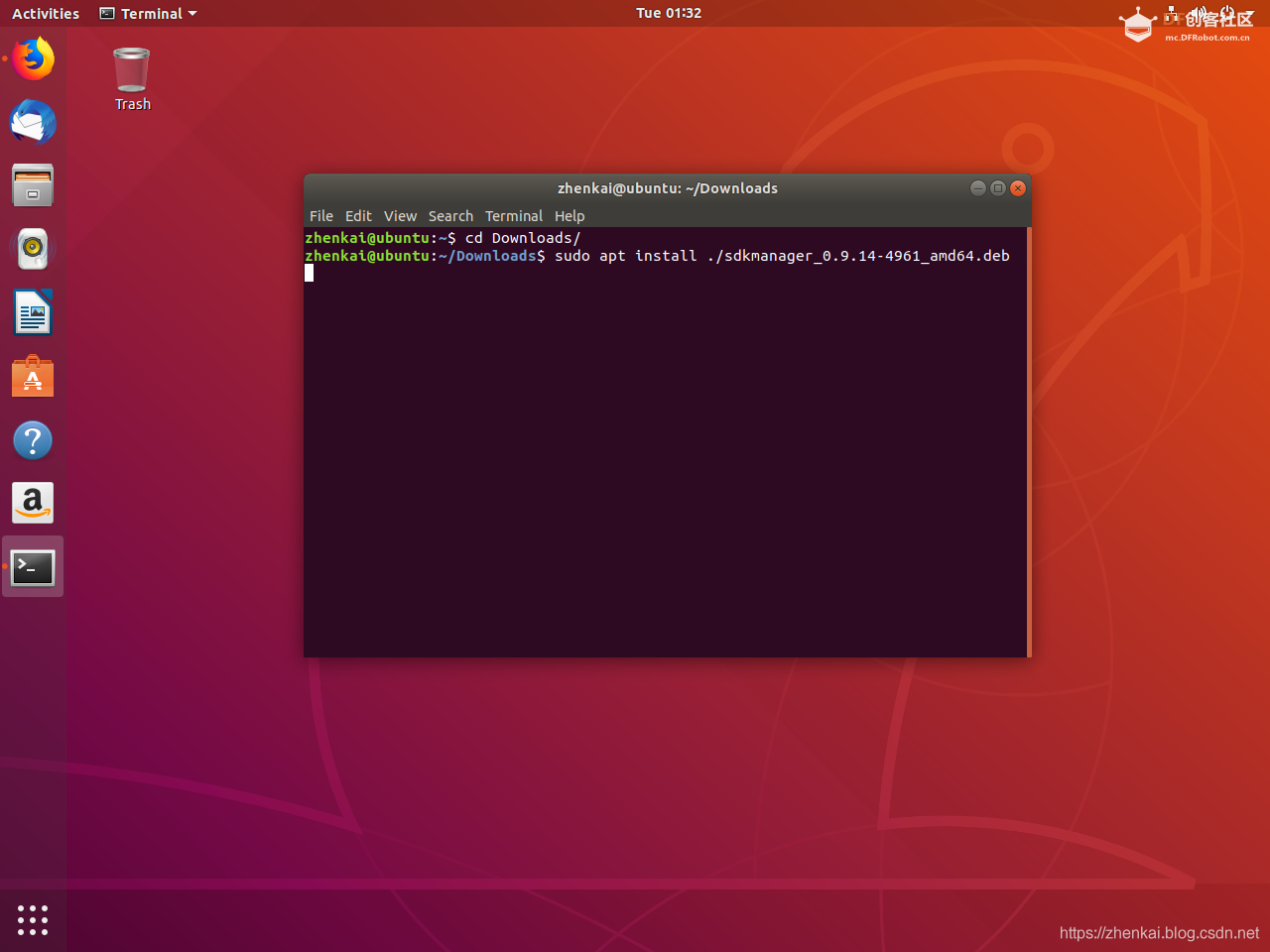
1、开机配置1.1 检查配件与接线主机 X1 1.2 开机在主机一侧有三个按钮,分别为开机(Power)、Force Recovery、Reset。Jetson Xavier 自带ubuntu 18.04 系统,首次开机时,进入的是以nvidia用户登录的Ubuntu命令行界面。如果要使用图形化界面,需要安装Nvidia Linux驱动,Nvidia 驱动安装通过sudo su 输入密码:nvidia,切换root权限用户。 2、刷机(安装JetPack)2.1 主机配置(虚拟机)系统ubuntu18.04 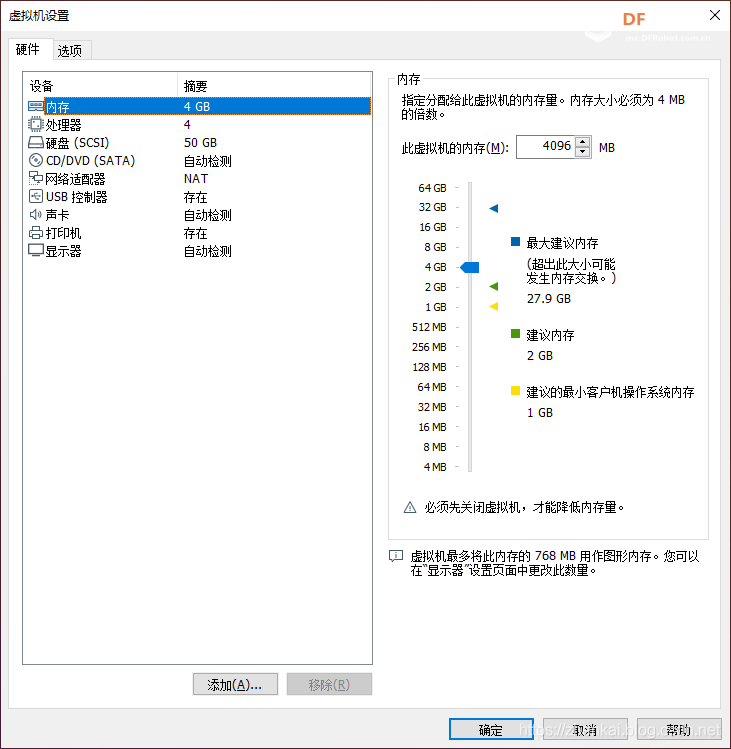 2.2 安装sdkmanager准备好后,下载最新的JetPack,我这里下载的是 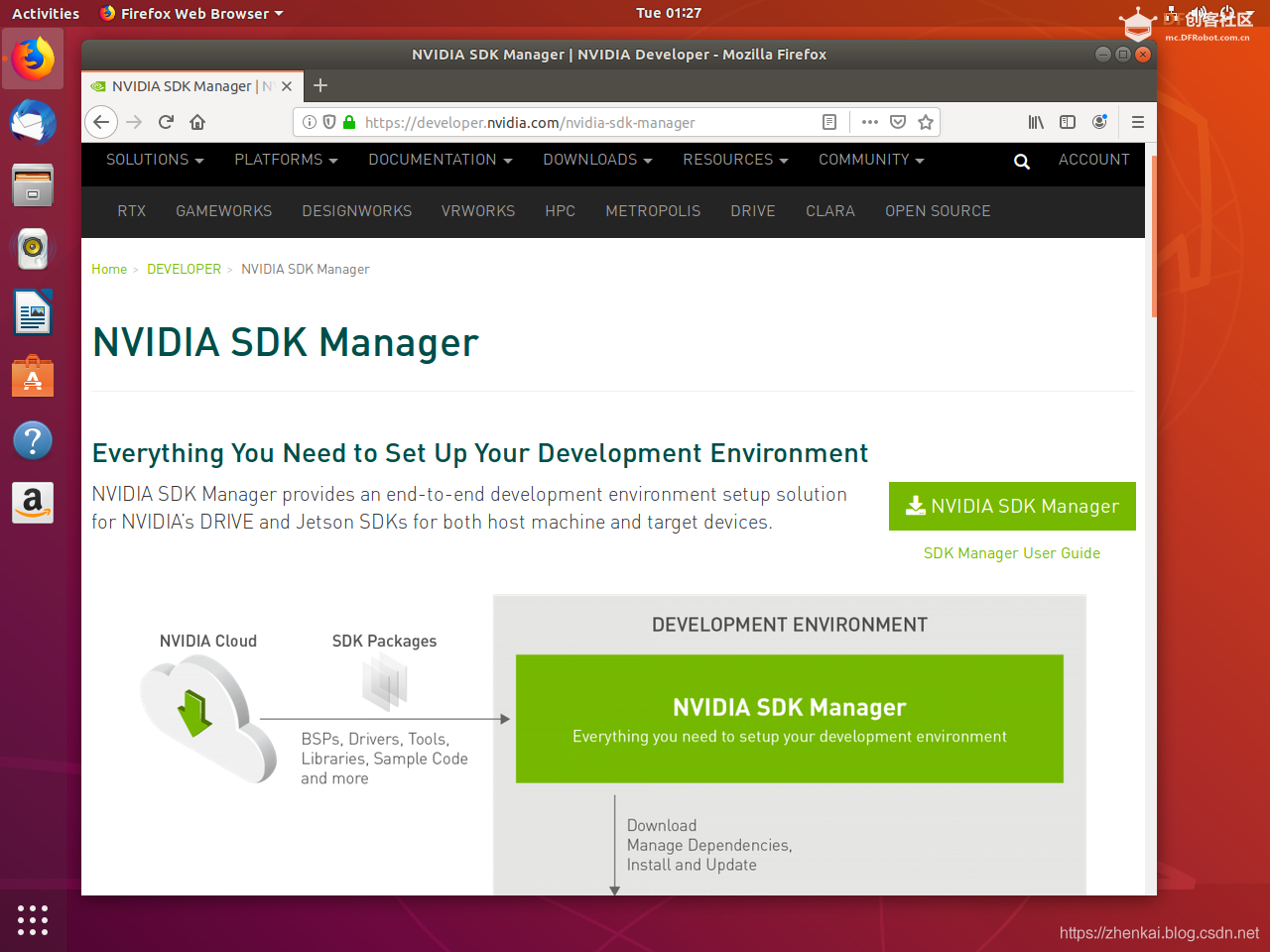 下载后输入sudo apt install /PATH_TO_SDKMANAGER,把PATH_TO_SDKMANAGER对应为你的下载文件,然后就会自动安装。
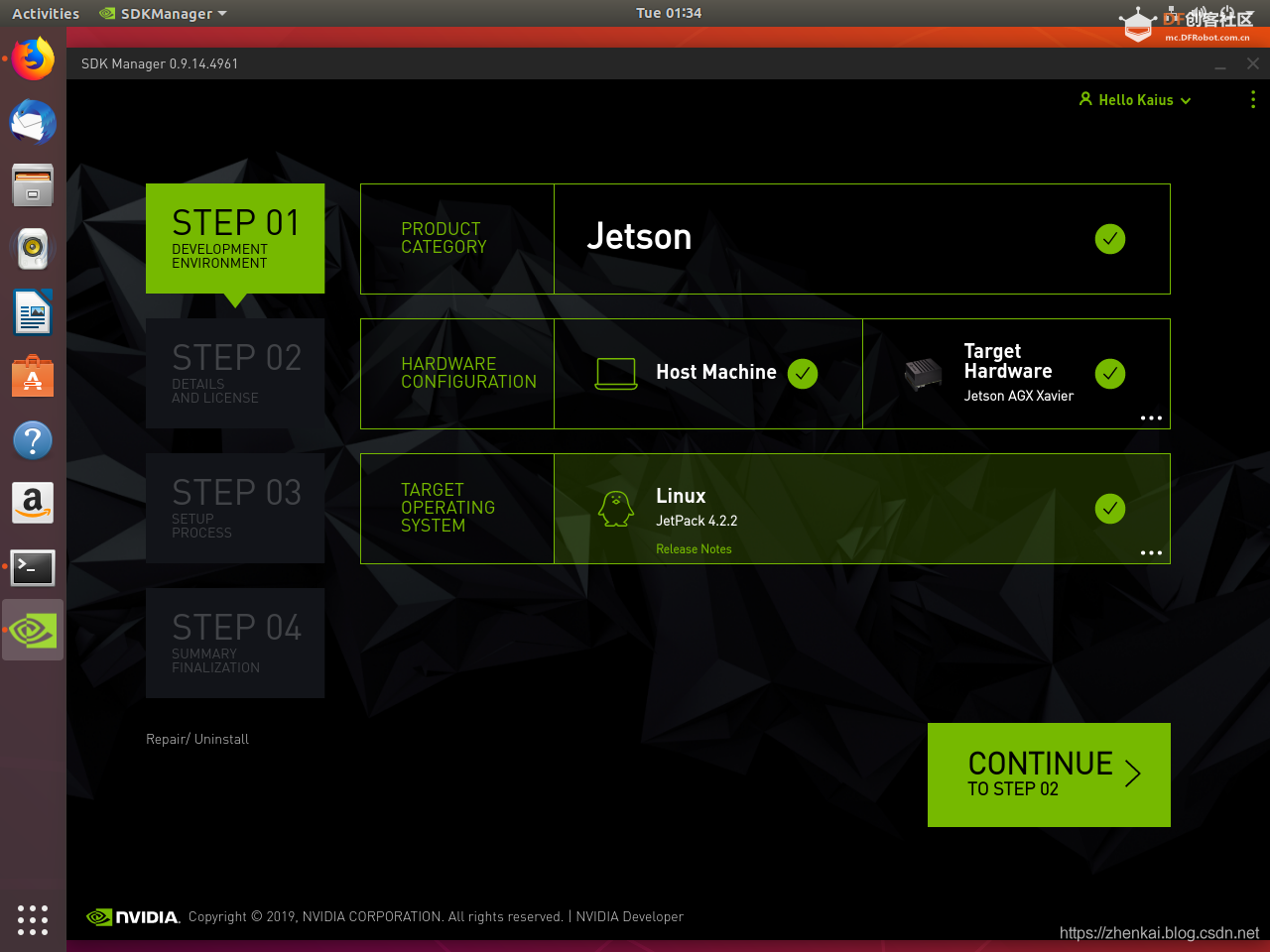
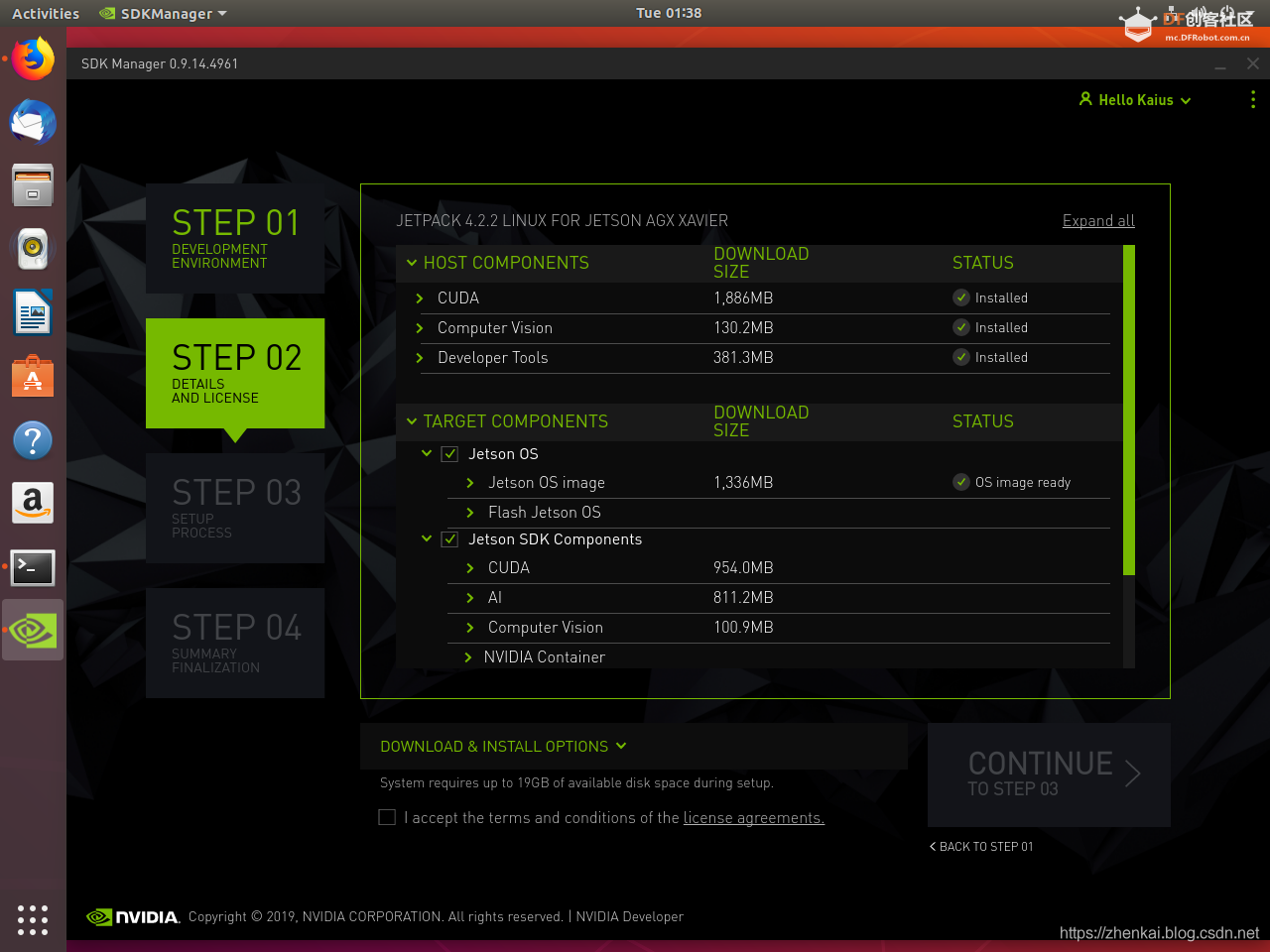
2.3 镜像下载安装sdkmanger之后,打开sdkmanger,输入nvidia账号,如下图所示。(注:如果出现登录不上账号的情况,建议将虚拟机的系统移除,重新安装。)
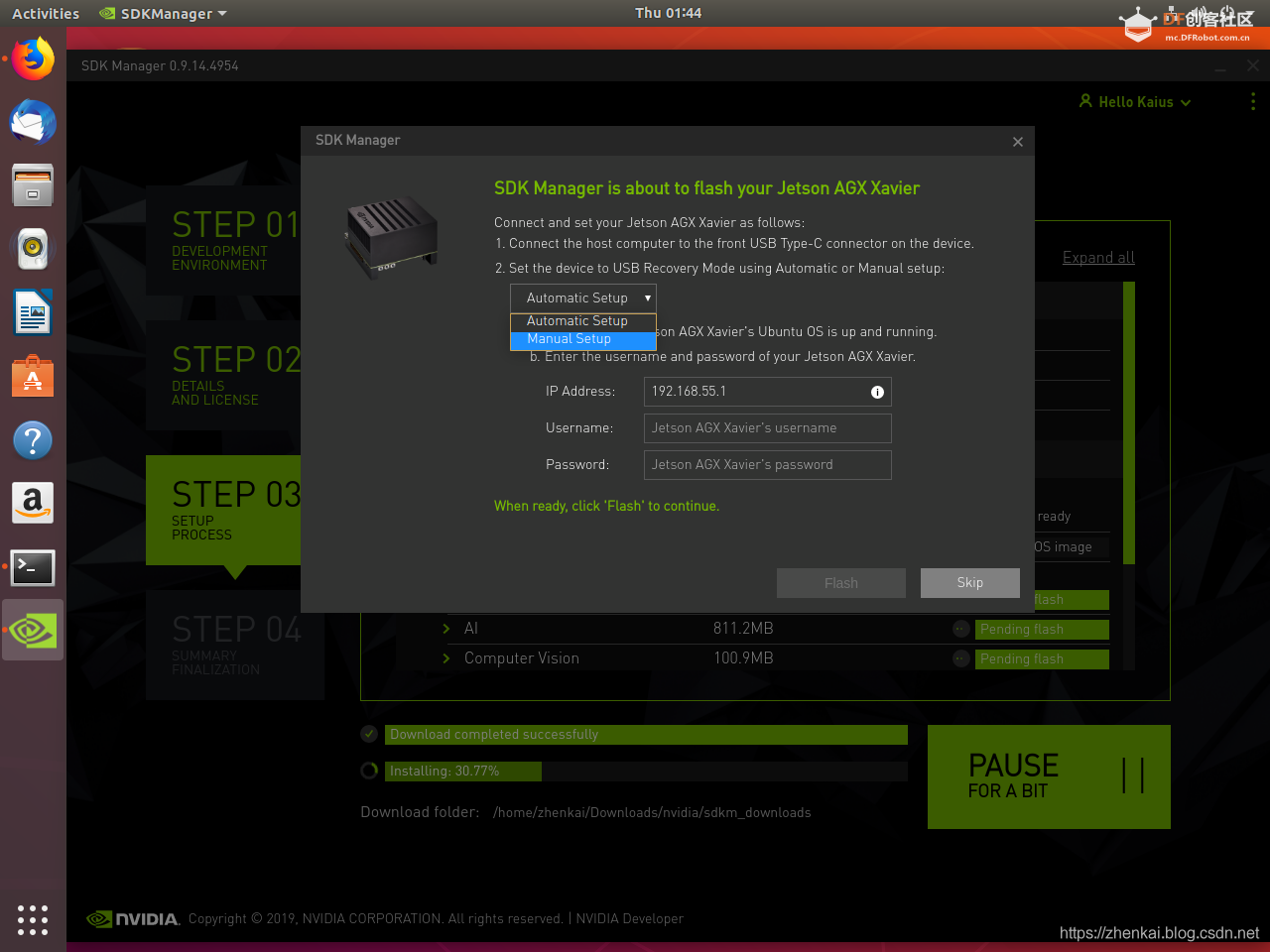
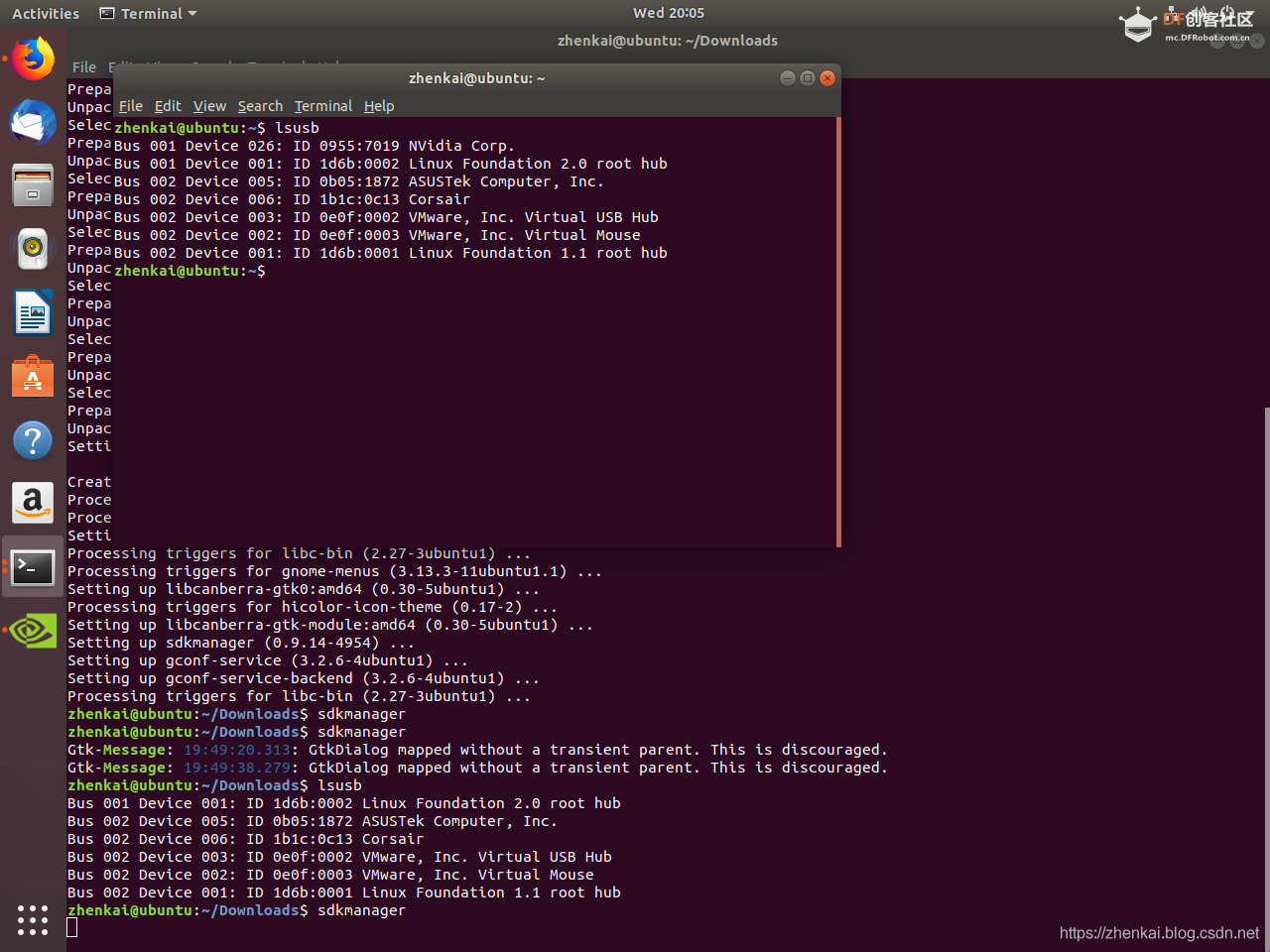
在这里有两种连接方式,一种是自动设置,一种是手动设置。(自动设置我没有跑成功,这里介绍一下手动设置)。 手动方式就需要自己动手进入recovery模式: 如果想要确认是否连接,可以在命令行中输入lsusb,如果里面有NVidia Corp.这一项则代表成功。
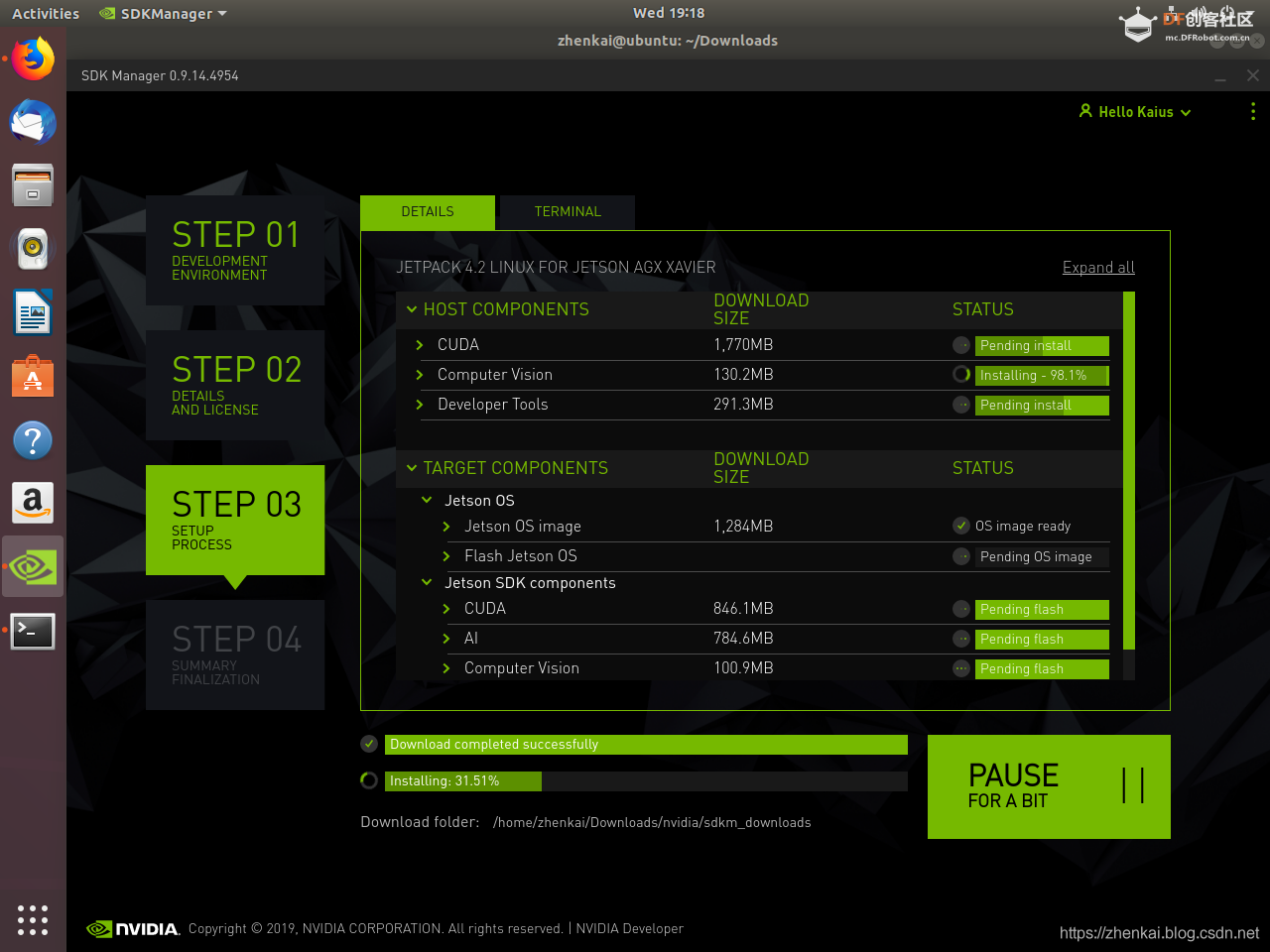
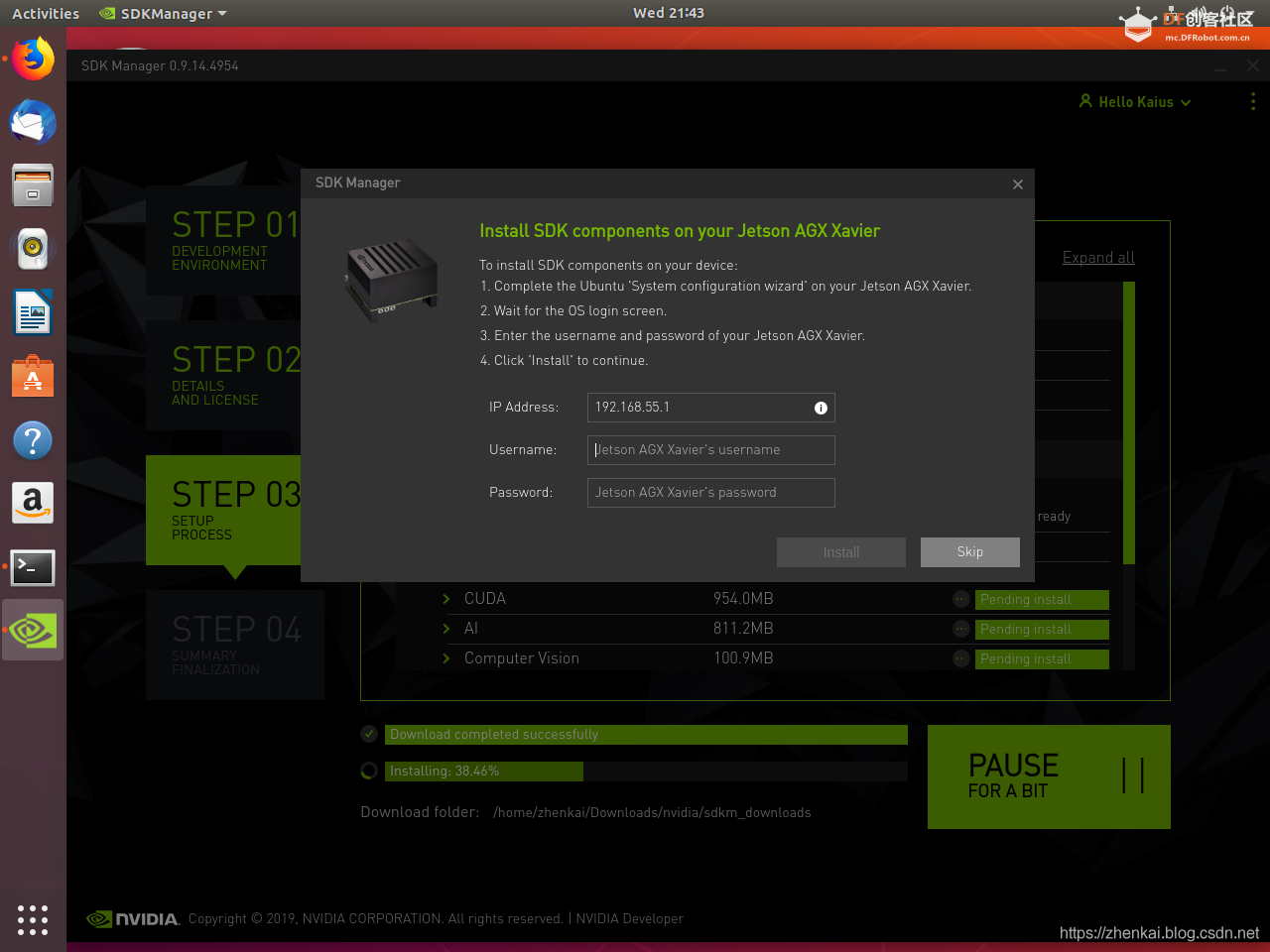
2.4 安装SDK组件要求:
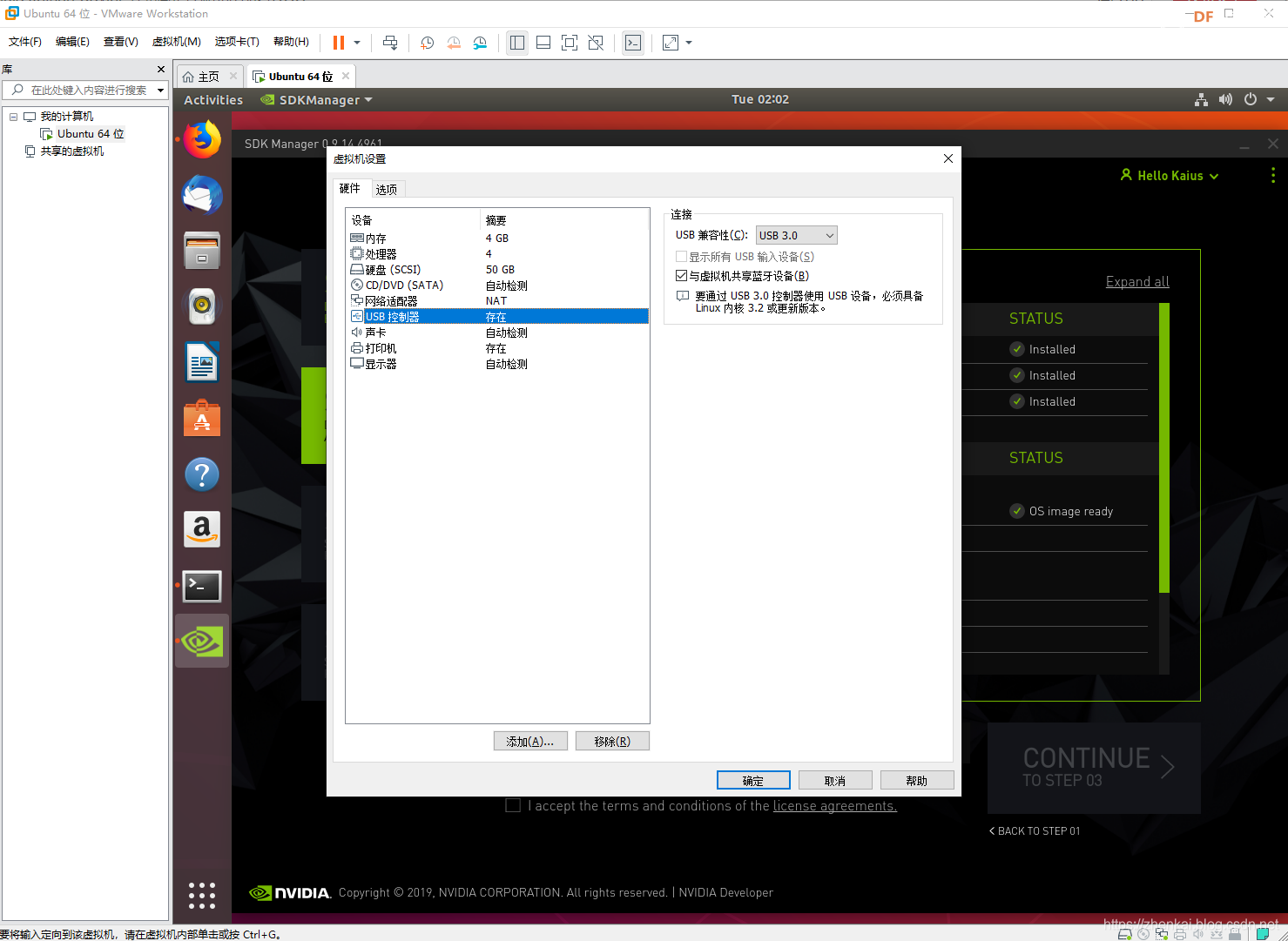
注意:在这一步的时候,我出现了连不上的情况,造成中这样的原因一般跟USB线有关。我用的是原装线依旧连不上,最后发现是自己的虚拟机不支持USB3.0接口。需要在Vmware配置里面修改一下:
在连上之后,又是漫长的等待。。。
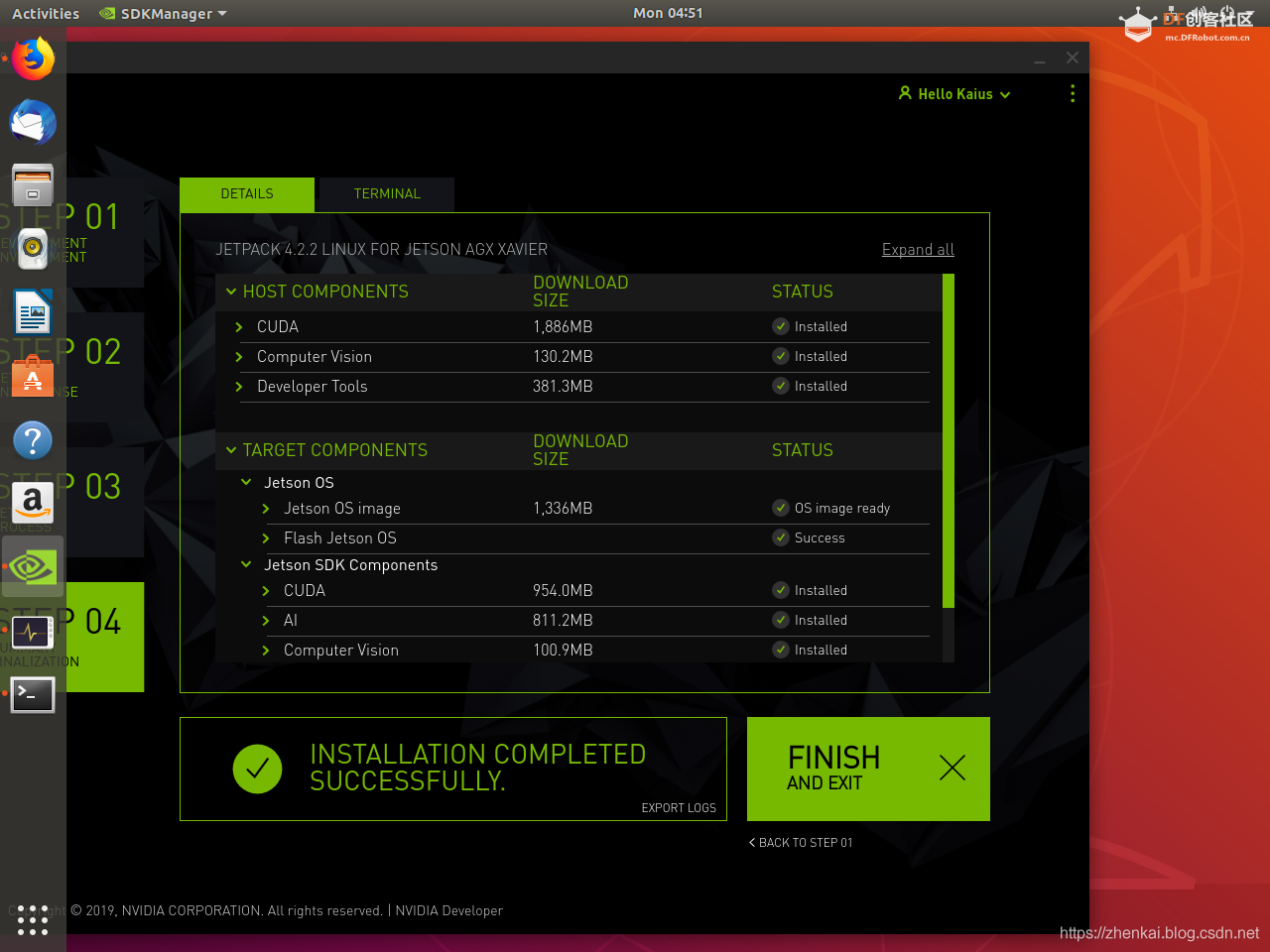
在踩了无数坑之后,终于看到了这个令人激动的FINISH。 3、部署ROSNvidia Jetson Xavier部署ROS跟Ubuntu下稍微有些不同,可以通过ROSXavier脚本安装: 有一个便利脚本可以安装Catkin Workspace,它是ROS的工具支持环境。该脚本称为setupCatkinWorkspace.sh。脚本命名工作空间后的可选参数,默认名称为catkin_workspace。工作区将安装在主目录中。例如: 将在主目录中创建名为jetsonbot的Catkin Workspace目录。 4、总结一路踩坑无数。。。大家互相交流学习,遇到填不上的坑,可以给我留言或者加QQ:1011697620,虽然我也不一定填的上(手动狗头)。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






