|
4086| 4
|
[教程] 以超声波跟随小车为例介绍小龟机器人图形编程V2的创新应用 |
|
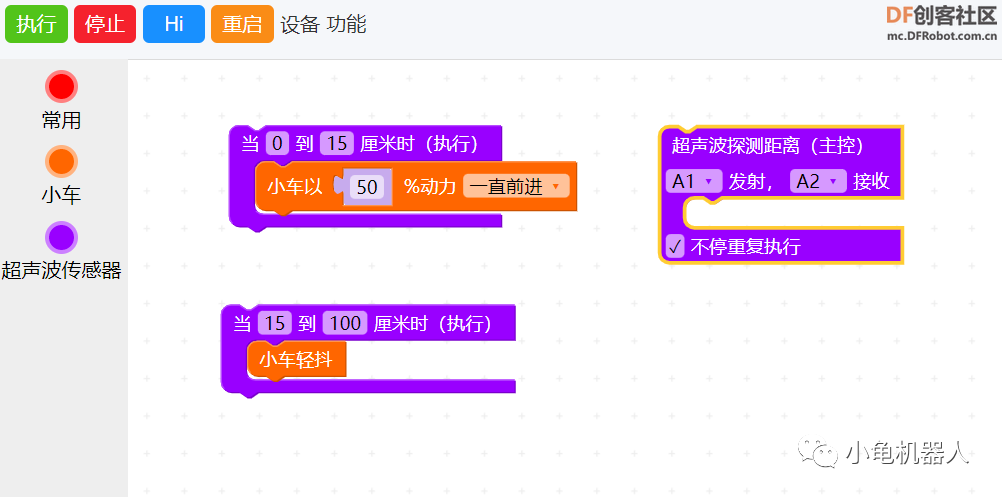
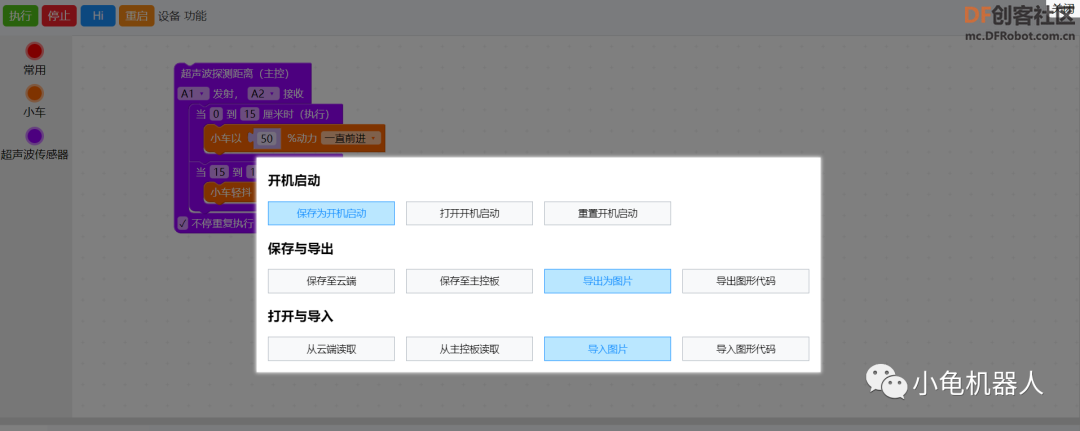
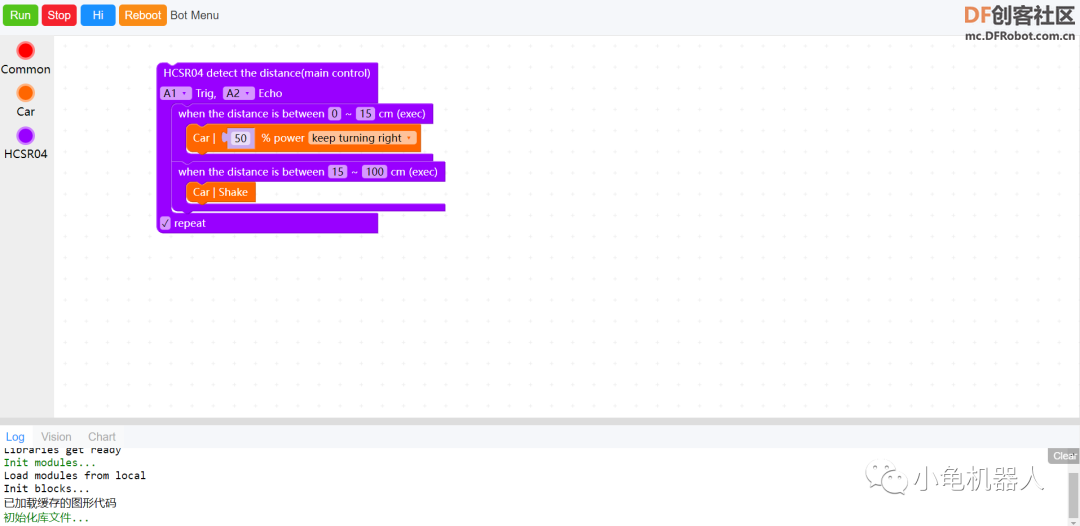
小龟图形编程V2进行了大的创新应用 编程模块自主选择添加删除 支持代码多种保存和导出模式 增加英语模块...... 先认识一下超声波传感器,下图是一款我们最常见的仿HC-SR04的超声波传感器。 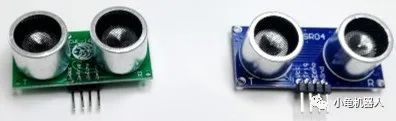
 按下图连接好传感器和小车: 超声波端 小车端 VCC ----- 3V(红色) GND ----- G (黑色) Trig ----- A1 (黄色) Echo ----- A2 (黄色) 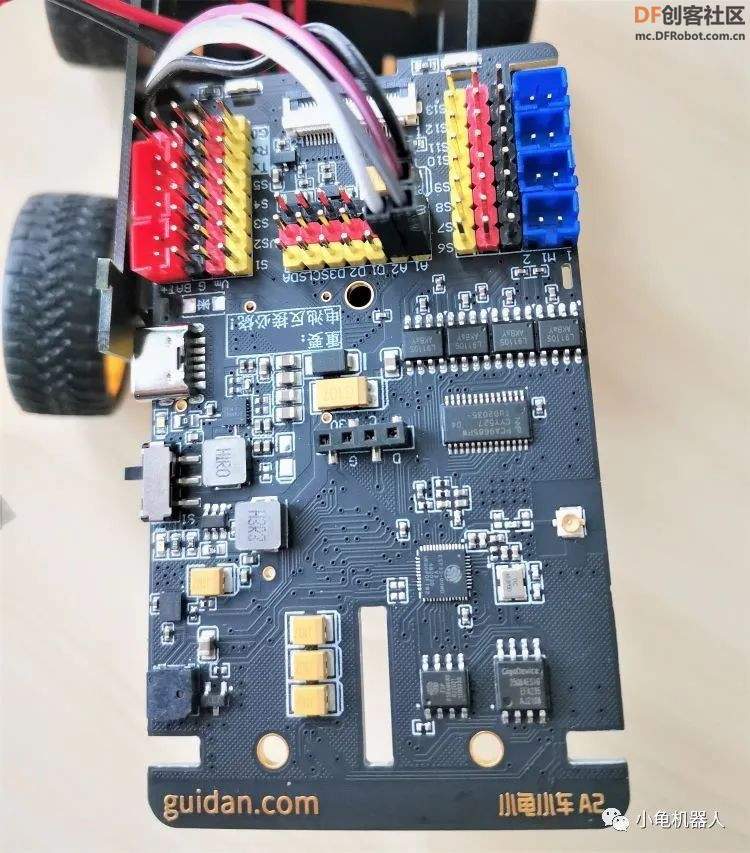 超声波小车搭建完成 



 更多有趣的机器人小知识 添加小龟机器人微信一起交流吧  捣腾快乐! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







