本帖最后由 捣腾一个机器人 于 2023-6-7 17:24 编辑
前言:
小龟机器人可以轻松学习机器人编程,不管是图形化编程,还是Python编程、Web编程,它都行。小龟同时开发了一体化编程平台,通过浏览器就可以直接进行编程,省去了下载安装的烦恼,让广大师生可以更轻松更愉快的学习机器人。
本文介绍小龟的Python机器人编程案例,辅以图形化编程帮助参考理解,主要由两部分组成:
1、Python教学案例介绍在教学上的实际应用;
2、Python编辑器介绍在线和离线双模式下的使用方法。
小龟机器人Python教学案例
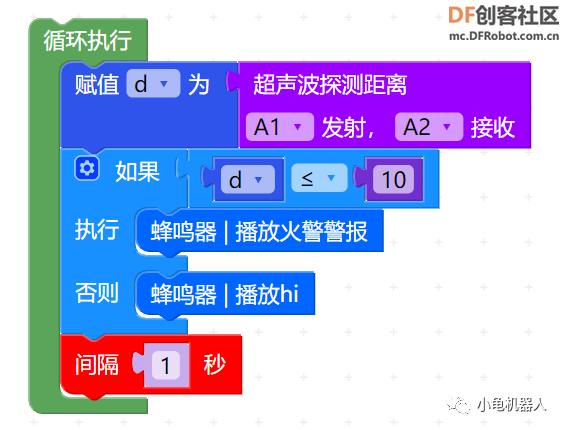
案例1 使用超声波模块实现近距离告警提示
知识点:
变量、循环、逻辑、音频
Python代码:
-
- d = None
-
- while True:
- sleep(0.001)
- d = car.hcsr04(A1, A2)
- if d <= 10:
- car.buzzer.fire()
- else:
- car.buzzer.music('''1=''')
- sleep(1)
图形化编程:
案例2 跑马灯
知识点:
列表、色彩
Python代码:-
- i = None
-
- for i in [int('0x' + '#ff0000'[1:], 16),
- int('0x' + '#33ff33'[1:], 16),
- int('0x' + '#000099'[1:], 16),
- int('0x' + '#000000'[1:], 16)]:
- sleep(0.001)
- car.led.on(i)
- sleep(0.75)
图形化编程:

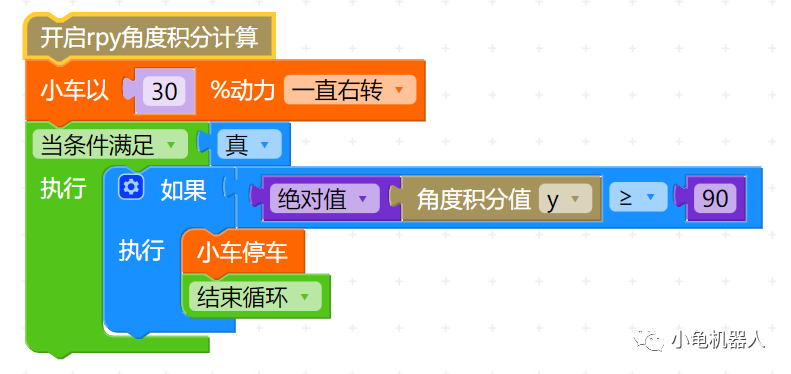
案例3 小车精准右转90度
知识点:
角度积分、绝对值、逻辑、电机运动
Python代码:-
- import math
-
- car.motion.start_offset()
- car.motion.start_rpy()
- car.right(30)
- while True:
- sleep(0.001)
- if math.fabs(car.motion.rpy()[2]) >= 90:
- car.stop()
- break
图形化编程:
案例4 按键控制LED灯
知识点:
循环、逻辑、色彩、人机互动
Python代码:
- while True:
- sleep(0.001)
- sleep(0.01)
- if (car.touch.is_pressed(A)) and (car.touch.is_pressed(B)):
- car.led.on(int('0x' + '#0000ff'[1:], 16))
- elif car.touch.is_pressed(B):
- car.led.on(int('0x' + '#ff0000'[1:], 16))
- elif car.touch.is_pressed(A):
- car.led.on(int('0x' + '#33ff33'[1:], 16))
- else:
- car.led.off()
图形化编程:

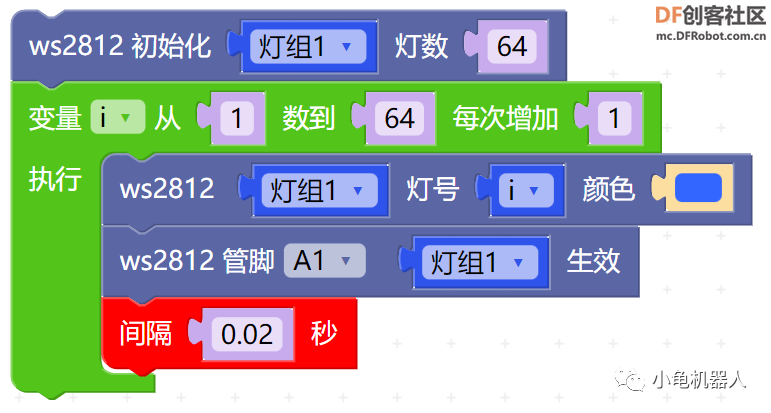
案例5 WS2812灯组逐个亮起
知识点:
变量递增、WS2812
Python代码:
- E7_81_AF_E7_BB_841 = None
- i = None
-
-
- _E7_81_AF_E7_BB_841 = [0x000000] * 64
- def hex2rgb(color):
- r = color >> 16
- g = color >> 8 & 0x00FF
- b = color & 0x0000FF
- return (r,g,b)
-
- def set_brightness(brightness,r,g,b):
- r = r*brightness//100
- g = g*brightness//100
- b = b*brightness//100
- return (r,g,b)
-
- def rgb2hex(r,g,b):
- return r << 16 | g << 8 | b
-
- def breathe(l, color, start_led=0, end_led=64, speed = 0.02, breathe_times=1, min_rightness=0, max_rightness=64, pin="A1"):
- rgb_color = hex2rgb(color)
- for k in range(breathe_times):
- for i in range(min_rightness, max_rightness):
- rgb_color_brightness = set_brightness(i, *rgb_color)
- hex_color = rgb2hex(*rgb_color_brightness)
- for j in range(start_led, end_led):
- l[j] = hex_color
- car.ws2812.write(pin, l)
- sleep(speed)
- for i in range(max_rightness, min_rightness-1, -1):
- rgb_color_brightness = set_brightness(i, *rgb_color)
- hex_color = rgb2hex(*rgb_color_brightness)
- for j in range(start_led, end_led):
- l[j] = hex_color
- car.ws2812.write(A1, l)
- sleep(speed)
-
- for i in range(1, 65):
- sleep(0.001)
- _E7_81_AF_E7_BB_841[i-1] = int('0x' + '#3366ff'[1:], 16)
- car.ws2812.write(A1, _E7_81_AF_E7_BB_841)
- sleep(0.02)
图形化编程:
案例6 舵机组并行运动
知识点:
舵机运动、舵机组运动、串行控制、并行控制
Python代码:
- car.servo([S1,S2,S3,S4],[
- [0.5, 0.5, 45,45,45,45],
- [0.5, 0.5, 135,135,135,135],
- [0.5, 0.5, 90,90,90,90],])
图形化编程:

案例7 在屏幕指定坐标位置显示文字
知识点:
坐标、屏幕显示
Python代码:
- car.screen.print(str('ABC'), 0, 0)
图形化编程:

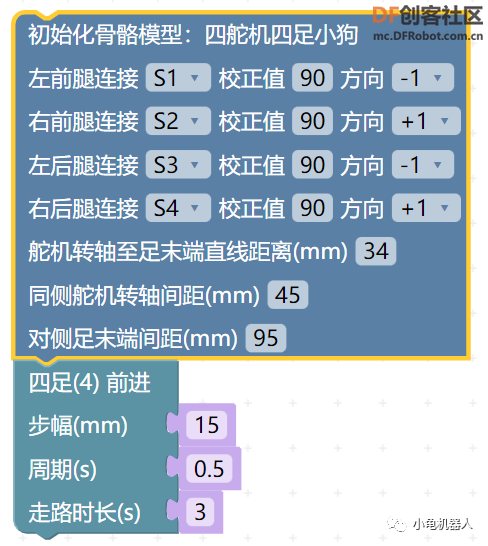
案例8 四足前进运动
知识点:
舵机组运动、四足步态
Python代码:
- import math
- class Dog:
- def __init__(self, pins, values, directions, leg_length, leg_space, leg_space_offside):
- self.pins = pins
- self.values = values
- self.directions = directions
- self.leg_length = leg_length
- self.leg_space = leg_space
- self.leg_space_offside = leg_space_offside
-
- def xpos(self, x1, x2, x3, x4, t1=0.5, t2=0):
- v1 = self.values[0]
- v2 = self.values[1]
- v3 = self.values[2]
- v4 = self.values[3]
- o1 = self.x2offset(x1)
- o2 = self.x2offset(x2)
- o3 = self.x2offset(x3)
- o4 = self.x2offset(x4)
- d1 = self.directions[0]
- d2 = self.directions[1]
- d3 = self.directions[2]
- d4 = self.directions[3]
-
- return [t1, t2, v1 + d1 * o1, v2 + d2 * o2, v3 + d3 * o3, v4 + d4 * o4]
-
- def zpos(self, z1, z2, z3, z4, t1=0.5, t2=0):
- v1 = self.values[0]
- v2 = self.values[1]
- v3 = self.values[2]
- v4 = self.values[3]
- o1 = self.z2offset(z1)
- o2 = self.z2offset(z2)
- o3 = -self.z2offset(z3)
- o4 = -self.z2offset(z4)
- d1 = self.directions[0]
- d2 = self.directions[1]
- d3 = self.directions[2]
- d4 = self.directions[3]
-
- return [t1, t2, v1 + d1 * o1, v2 + d2 * o2, v3 + d3 * o3, v4 + d4 * o4]
-
- def set_x(self, dx, t=0.5):
- car.servo(self.pins, [
- self.xpos(-dx, -dx, -dx, -dx, t)
- ])
- sleep(t)
-
- def set_z(self, height, t=0.5):
- _h = self.leg_length + height
- car.servo(self.pins, [
- self.zpos(_h, _h, _h, _h, t)
- ])
- sleep(t)
-
- def x2offset(self, dx):
- offsetRad = math.asin(dx/self.leg_length)
- offsetDeg = offsetRad * (180 / math.pi)
- return offsetDeg
-
- def z2offset(self, dz):
- offsetRad = math.acos(dz/self.leg_length)
- offsetDeg = offsetRad * (180 / math.pi)
- return offsetDeg
-
- def rotate_x(self, deg, t=0.5):
- rad = deg * (math.pi / 180)
- h = self.leg_space_offside / 2 * math.sin(rad)
-
- _l = self.leg_length / 1.414
- car.servo(self.pins, [
- self.zpos(_l + h, _l - h, _l + h, _l - h, t)
- ])
- sleep(t)
-
- def rotate_y(self, deg, t=0.5):
- rad = deg * (math.pi / 180)
- h = self.leg_space / 2 * math.sin(rad)
- _l = self.leg_length / 1.414
- car.servo(self.pins, [
- self.zpos(_l + h, _l + h, _l - h, _l - h, t)
- ])
- sleep(t)
-
- def go(self, dx, interval=0.5, keep=1):
- times = keep / (interval*4)
- _times = math.floor(times)
-
- for i in range(times):
- car.servo(self.pins, [
- self.xpos(0,dx,0,-dx, interval),
- self.xpos(dx,dx,0,-dx, interval),
- self.xpos(dx,0,-dx,0, interval),
- self.xpos(dx,dx,-dx,0, interval),
- ], 0)
- sleep(interval*4)
-
- car.servo(self.pins, [self.xpos(0,0,0,0, interval)])
-
- def back(self, dx, interval=0.5, keep=1):
- times = keep / (interval*4)
- _times = math.floor(times)
-
- for i in range(times):
- car.servo(self.pins, [
- self.xpos(0,dx,0,-dx, interval),
- self.xpos(0,dx,0-dx,-dx, interval),
- self.xpos(dx,0,-dx,0, interval),
- self.xpos(dx,0,-dx,-dx, interval),
- ], 0)
- sleep(interval*4)
-
- car.servo(self.pins, [self.xpos(0,0,0,0, interval)])
-
- def left(self, dx, interval=0.5, keep=1):
- times = keep / (interval*4)
- _times = math.floor(times)
-
- for i in range(times):
- car.servo(self.pins, [
- self.xpos(0,dx,0,-dx, interval),
- self.xpos(-dx,dx,0,-dx, interval),
- self.xpos(-dx,0,dx,0, interval),
- self.xpos(-dx,dx,dx,0, interval),
- ], 0)
- sleep(interval*4)
-
- car.servo(self.pins, [self.xpos(0,0,0,0, interval)])
-
- def right(self,dx, interval=0.5, keep=1):
- times = keep / (interval*4)
- _times = math.floor(times)
-
- for i in range(times):
- car.servo(self.pins, [
- self.xpos(dx,0,-dx,0, interval),
- self.xpos(dx,-dx,-dx,0, interval),
- self.xpos(0,-dx,0,dx, interval),
- self.xpos(dx,-dx,0,dx, interval),
- ], 0)
- sleep(interval*4)
-
- car.servo(self.pins, [self.xpos(0,0,0,0, interval)])
-
- pins = [S1, S2, S3, S4]
- values = [90, 90, 90, 90]
- dirs = [-1, +1, -1, +1]
- leg_len = 34
- leg_space=45
- leg_space_offside=95
- dog = Dog(pins, values, dirs, leg_len, leg_space, leg_space_offside)
- dog.go(15,0.5,3)
图形化编程:
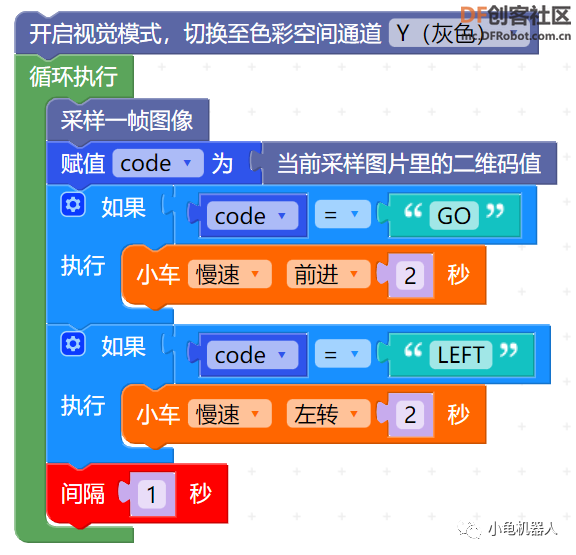
案例9 小车通过识别二维码运动
知识点:
机器视觉、图像处理、变量、逻辑、循环、文本
Python代码:
- code = None
-
- car.vision.on('Y')
- while True:
- sleep(0.001)
- car.vision.snap()
- code = car.vision.qrcode()
- if code == 'GO':
- car.go(30, 2)
- sleep(2)
- if code == 'LEFT':
- car.left(30, 2)
- sleep(2)
- sleep(1)
图形化编程:
小龟机器人Python编辑器
在线模式:
登录网址:http://guidan.com/ide2/
离线模式:
1、连接小龟机器人自身热点:xiaogui-xxxx或小车-xxxx(固件版本不同显示差异,若提示该网络不能上网请选择继续使用该网络)
2、登录:192.168.4.1,页面显示如下

3、点击Python即可进行Python教学和练习

|



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








