|
18160| 6
|
做一只具备热视觉功能的库克鸡 |

本帖最后由 RRoy 于 2023-5-31 14:29 编辑 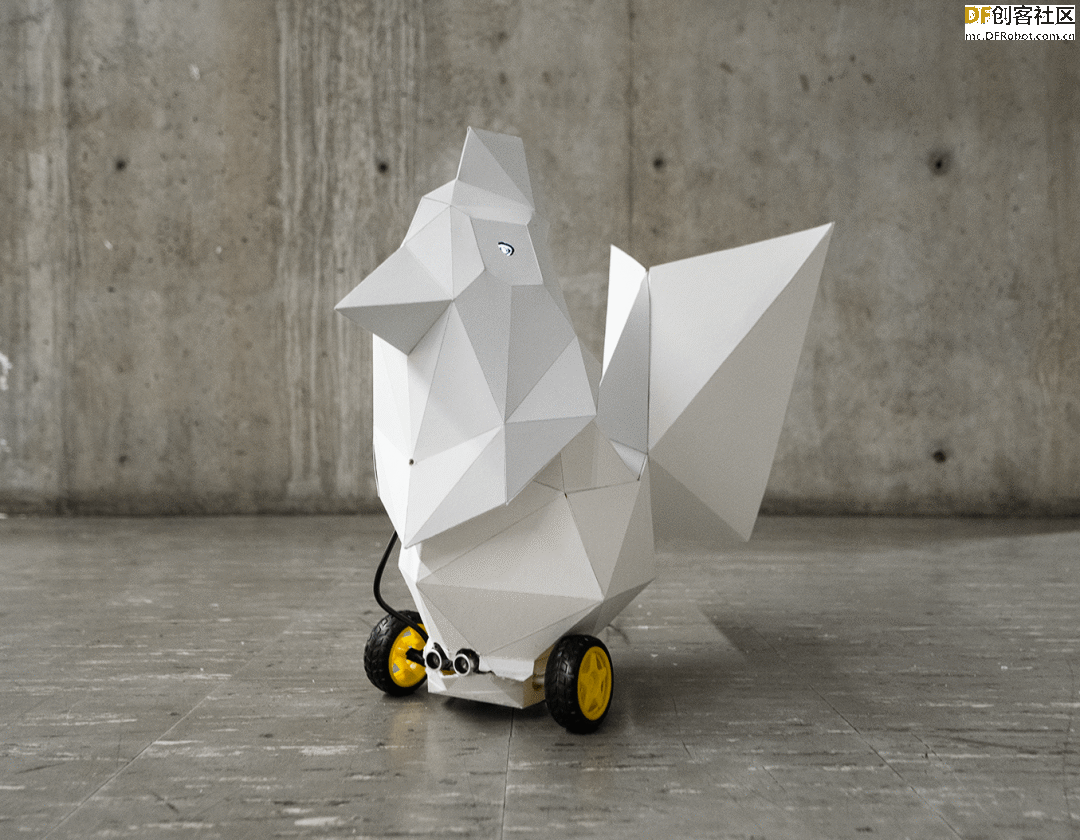 自1992年以来,Cucco这种类似鸡的生物就在《塞尔达传说》系列的各种游戏中出现。引用《塞尔达传说》档案: “如果主角Link多次攻击Cucco,它将变得愤怒,并开始大声啼叫召唤它的群体一起从不同方向飞下来攻击他(用它们的嘴啄死他)。如果被一群Cuccos攻击,Link没有办法保护自己,除非他设法在逃离现场之前及时逃脱。”(这通常称为“Cucco复仇队”) 这个毫无用处的“机器人”是设计来模仿这种动态性格的。  当暴露在足够大的噪声下时,Cucco会进入复仇模式,并开始追逐最近的物体,在与周围环境温度形成对比的热信号方向上飞行。  该项目是 ITECH 国际科学硕士计划中“计算设计与数字制造研讨会”的一部分,由Matthias Hornung、Otto Lindstam和Kalaivanan Amudhan共同完成。 所需物品 
机器人的布局和行为,以及热导航的原理。 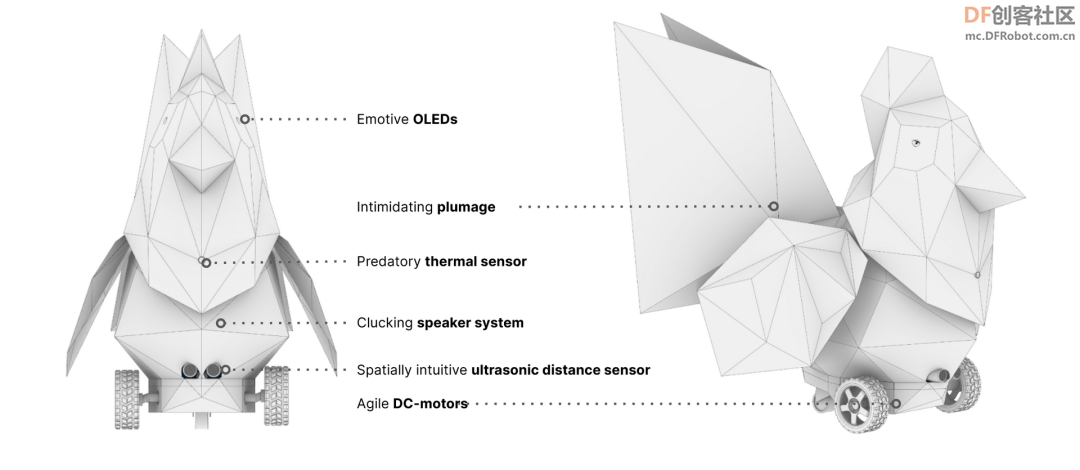 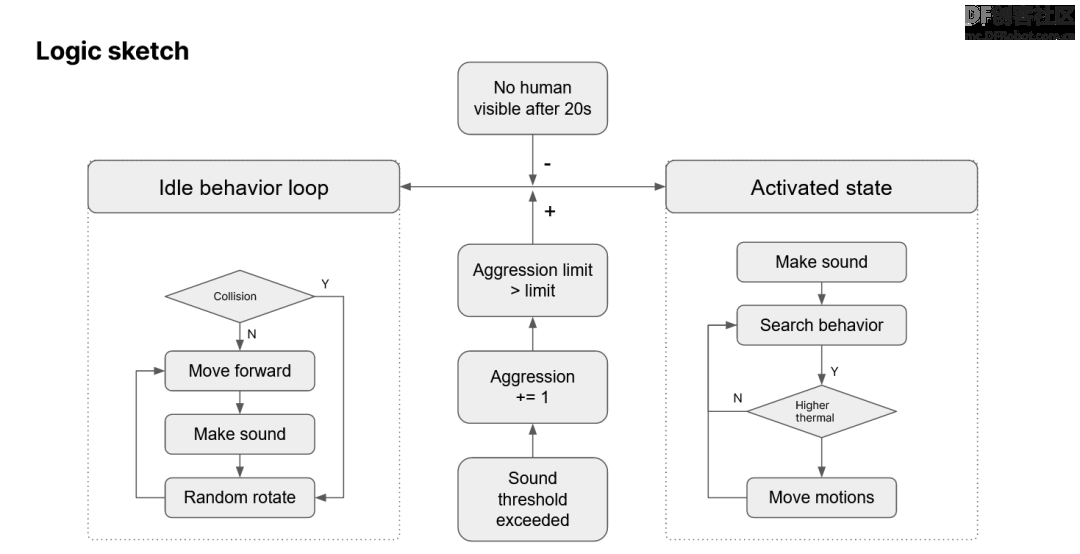 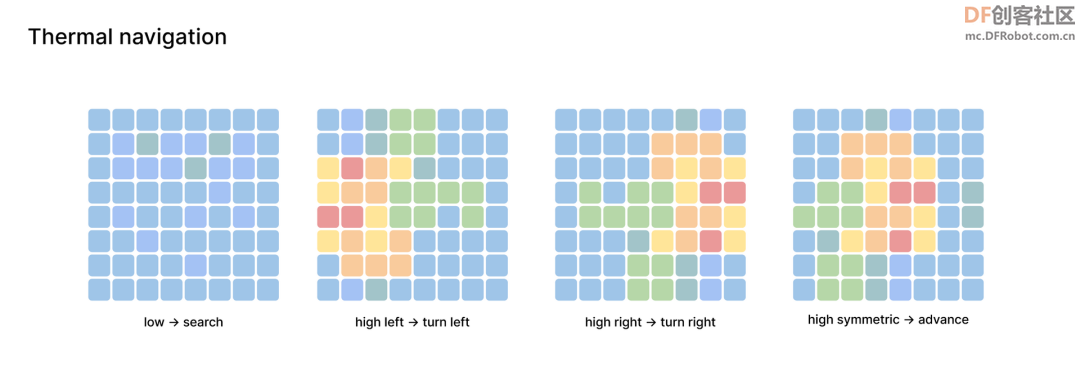 步骤 2:订购硬件 订购所需的传感器和执行器。 参阅供应清单,确保订购了正确的元件。 请注意,如果需要,你也可以用其他传感器替换触发“愤怒模式”的麦克风。 作为预防措施,我们建议使用两个单独的 Arduino 板,而不是一个,以避免液晶显示屏和热成像相机(<Adafruit_GFX.h> 和 <Adafruit_SSD1306.h>)的库可能干扰的任何潜在问题。 步骤 3:修改 OLED 显示器的 I2C 地址 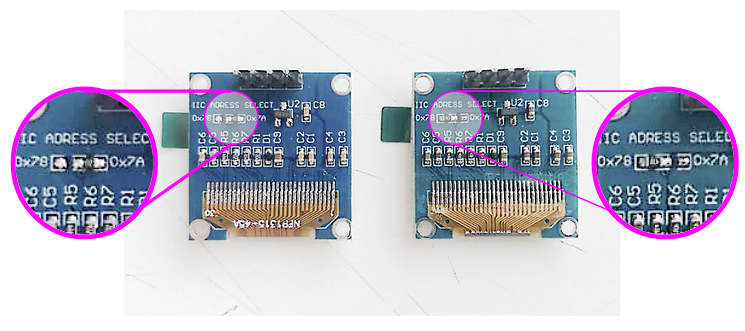 为了镜像液晶显示屏,它们应该具有不同的 I2C 地址。因此,请按照下面的说明操作: 1.前往 https://www.instructables.com/Arduino-and-the-SSD1306-OLED-I2C-128x64-Display/ ,按照第 1 步和第 2 步操作。 2.从 https://playground.arduino.cc/Main/I2cScanner/ 复制代码,并分别为两个显示器运行该代码。 3.如果两个显示器的地址相同(例如,0x3C),则继续执行下面第 3 步的指南。如果地址不同(例如,0x3C 和 0x3D),则记录地址并将显示器标记为区分它们。稍后将使用它们。 4.将一个液晶显示屏的 I2C 地址更改为将电阻器移至其背面。 5.完成后,返回到第 2 步,并检查地址是否正确更改。 步骤 4:上传音频文件至音频板 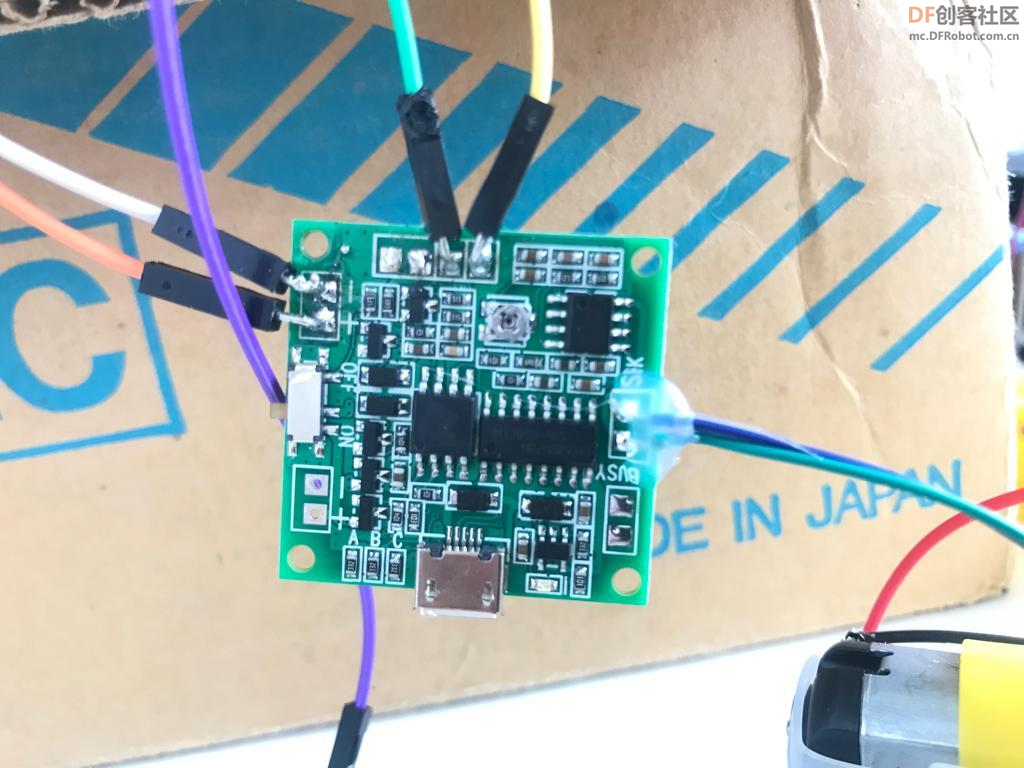 将电路板通过提供的 USB 线连接到计算机上,它将显示为存储设备。 只需将小于 8MB 的声音文件拖放到其上并弹出。 通过将其连接到电源并按下附加的按钮来验证声音系统的功能。 完成后,请取消连接按钮,改为按照上面显示的方式接线,并按照以下步骤中的图表进行连接。 步骤 5:组装传感器和执行器  在清洁平整的桌子上展开所有组件。 确保随手准备几根不同的跳线,特别是公-公和母-公跳线。 使用电子原理图表示连接传感器和执行器。暂时将两个 Arduino 板分开。 由于 LCD 显示器和红外线摄像机在鸡身内位置较远,因此请使用长电缆将它们连接起来。 通过调节麦克风的电位器,将其的灵敏度向逆时针方向旋转,直到 LED-2 熄灭。一旦组装所有电子器件并进行测试,可以进一步微调以适应自己的感觉。 请注意,灰色的元件仅在希望实现振翅机构的附加直流电机时才需要。这超出了本说明的范围有兴趣的可以自行研究。 相关的pdf文档可以在文末下载。 步骤 6:下载库 库: https://github.com/adafruit/Adafruit_AMG88xx https://github.com/adafruit/Adafruit-GFX-Library https://github.com/adafruit/Adafruit_SSD1306 访问步骤 3 中列出的网站,下载代码所需的必要库。或者从 Arduino 库管理器下载它们。 按照每个网站提供的说明正确安装库。 步骤 7:上传并测试代码  将第一个代码文件(AngryEye.ino)复制并上传到 Arduino IDE。这将是除热成像相机外所有传感器和执行器的主板。 编译代码并检查是否正确下载了所有库。 上传时,声音芯片应该触发一次,之后液晶显示屏将启动。这需要几秒钟。 检查所有传感器和执行器是否正常工作。我们添加了“Serial.Println”功能以触发和驱动运动,以便了解一切是否正常工作。 完成后,请使用第二个代码文件(thermalNavImplementation.ino)上传到带有热成像相机的第二个 Arduino 板,确认其正确编译后。 代码将将热成像相机读数输出为 4 种类型的动作:l(向左)、r(向右)、f(向前)和 s(搜索)。可以通过观察串行监视器,通过手在传感器前方的空间移动来验证响应。提供的处理脚本可以提供传感器捕捉的视觉反馈。 步骤 8:测试眨眼行为  通过使用指定 OLED 模型的十六进制转换器,测试眨眼行为,并且还可以制作自定义动画帧。 步骤 9:将两个板连接在一起 一旦确认两个 Arduino 板都正常工作,就可以将它们连接在一起。你可以参考电子原理图表示,了解如何进行连接。 在继续之前,请确保已取消注释主代码脚本中负责在两个板之间通信的函数。 使用跳线将 Arduino 板连接在一起,并确保它们安全地固定。布线连接应对应于电子原理图表示。 仔细检查所有传感器和执行器是否按预期工作。你可以运行一些测试,验证运动检测,声音检测和热成像是否都正常工作。 确定一切都可以与其他元件良好地配合使用,确保所有元件都已牢固地固定在合适位置,并且布线连接是否紧密。可以使用热胶和电气胶带来固定电线。 步骤 10:制作机身 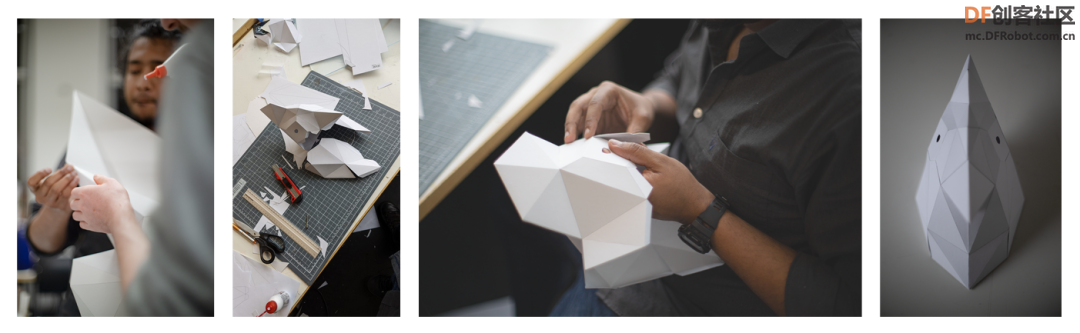 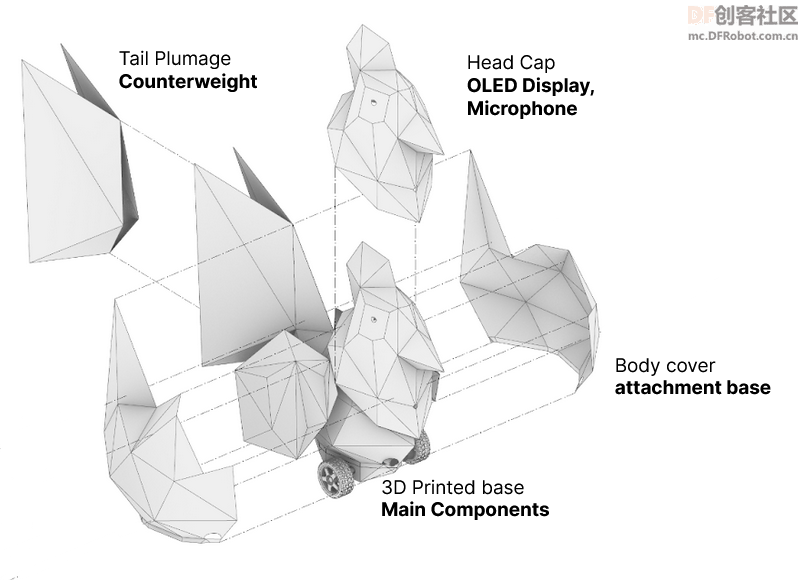 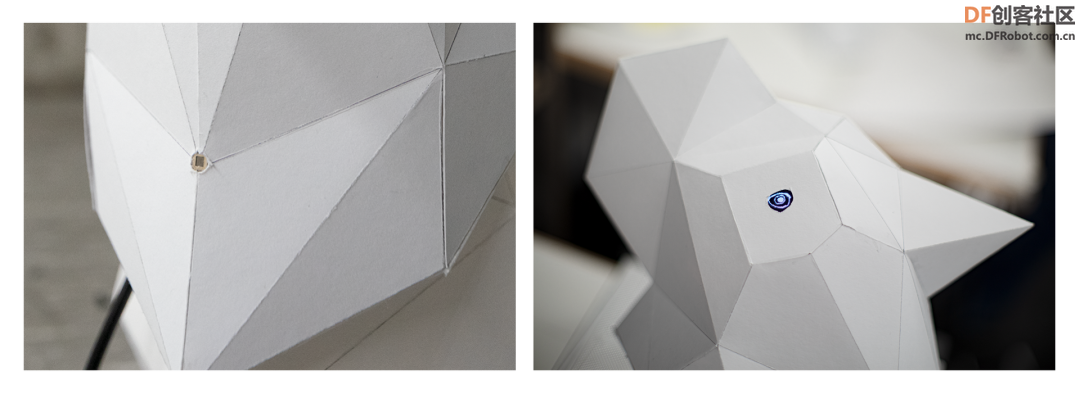 将底盘和轮子延伸件 3D 打印。 通过螺丝将转向轮安装在底盘背面。 根据提供的样板从厚纸上切下机身、尾巴和头。 将切割件粘合在一起,并将尾巴固定在主体上。可使用提供的 obj 文件作为各部分之间的连接参考。 制作热传感器和眼睛的孔。可以跟踪 OLED 显示的眼睛图像。 所有文件可以在文末下载。 步骤 11: 安装电路 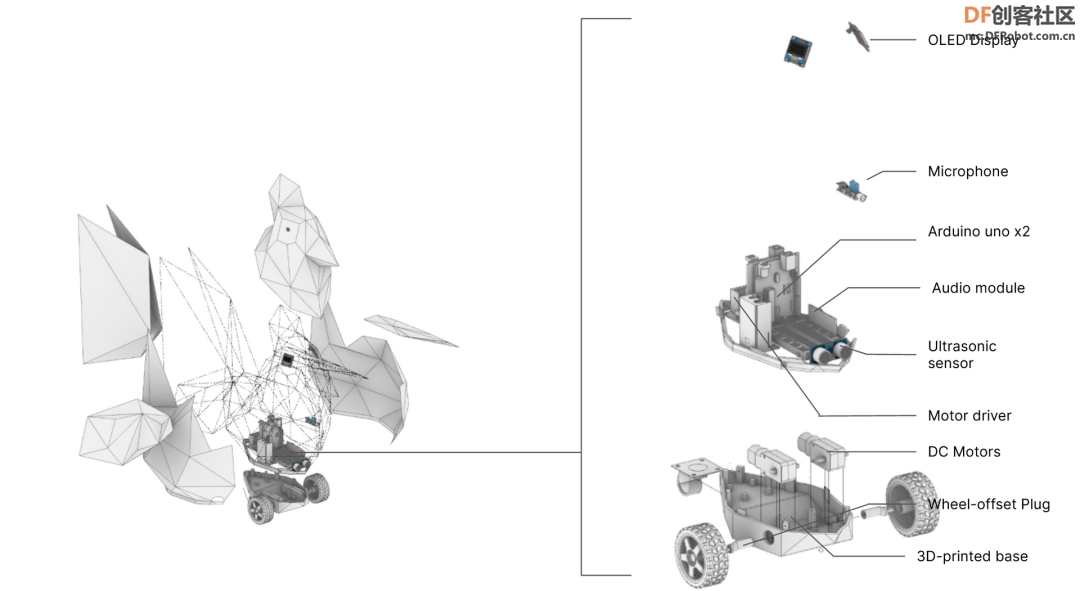 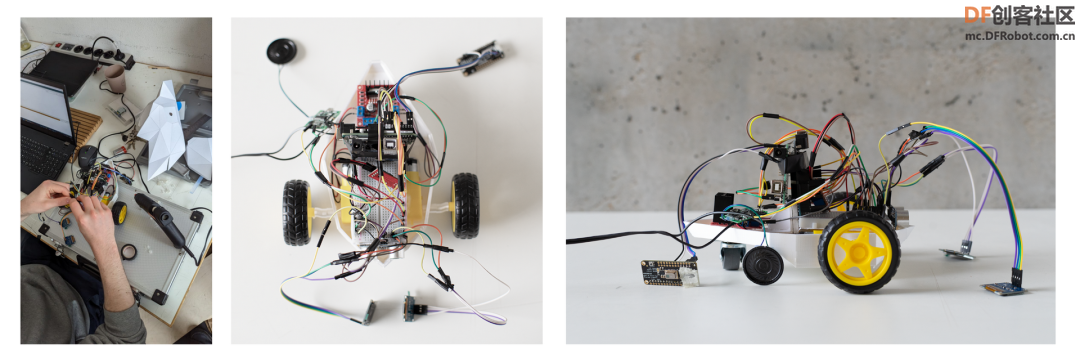 使用热熔胶将直流电机固定在底盘底部,并确保它们的一个轴在侧向孔中居中。 在前端安装超声波传感器,将面包板粘在后面。 在面包板后面垂直安装一块泡沫板,并将两个arduino各自附在一侧。 将电机驱动器安装在底盘的后部。 将音频模块和电池放置在空间充足的地方。 步骤 12: 固定主体 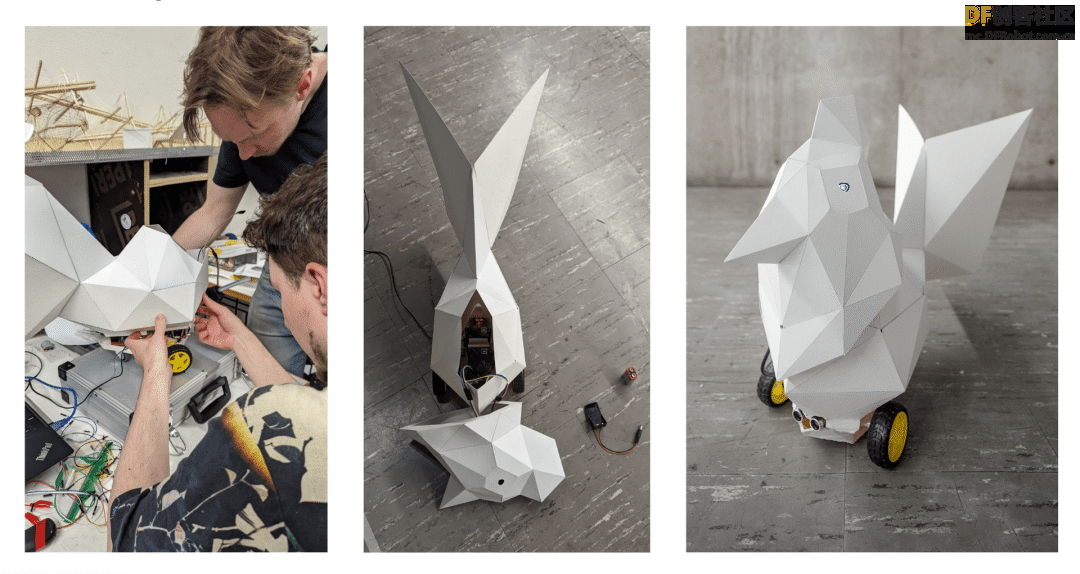 通过将底部纸片粘在3D打印件上,将船体固定到底盘上。现在可以通过脖子口看到Arduino板。 确保为电机驱动器和逻辑组件都提供足够的电源。这可能需要对电池电压和主代码中速度设置进行微调,确保稳定的运行结果。 步骤 13: 欣赏成果 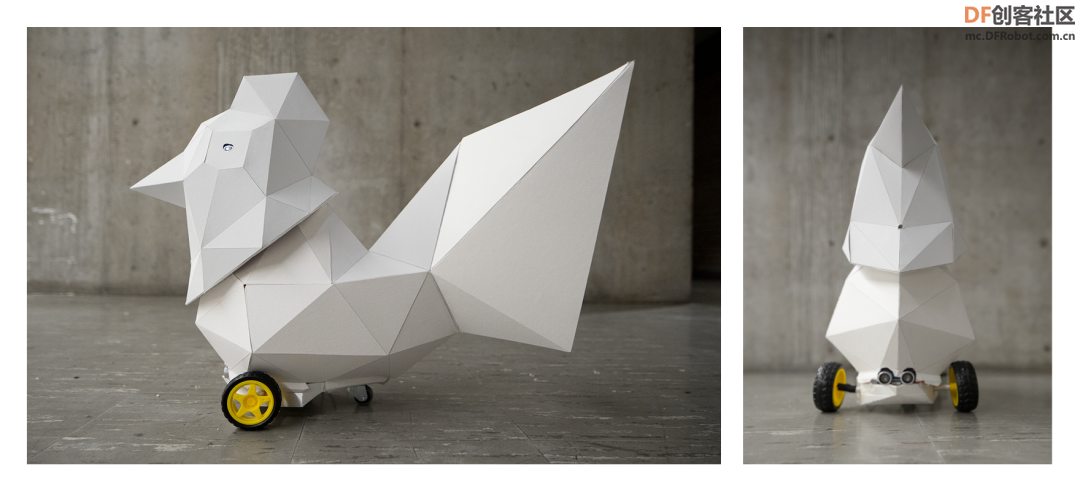 通过上面的步骤,相信你应该能够成功组装机器人并确保它可以正常工作了! 原文作者:otto.lindstam 原文链接:https://www.instructables.com/Robotic-Kukko/ 译文首发于公众号:DF创客社区 转载请注明来源信息 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






