|
7749| 4
|
[项目] 自制一个基于Arduino的3D打印六足机器人 |

六足机器人,顾名思义拥有六条腿,这些腿可以独立移动,使它们能够很好地穿越不同类型的地形。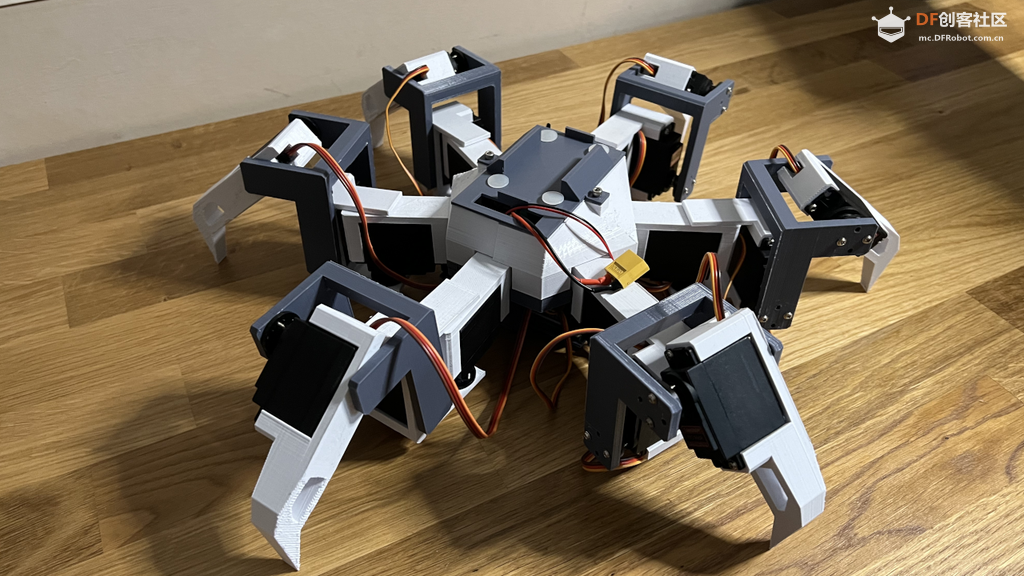 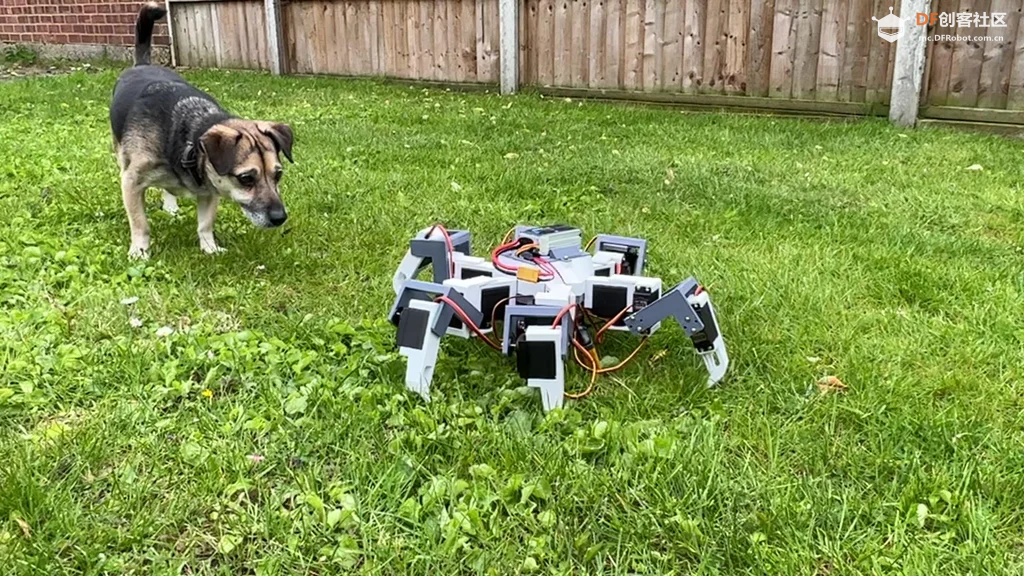  材料和工具 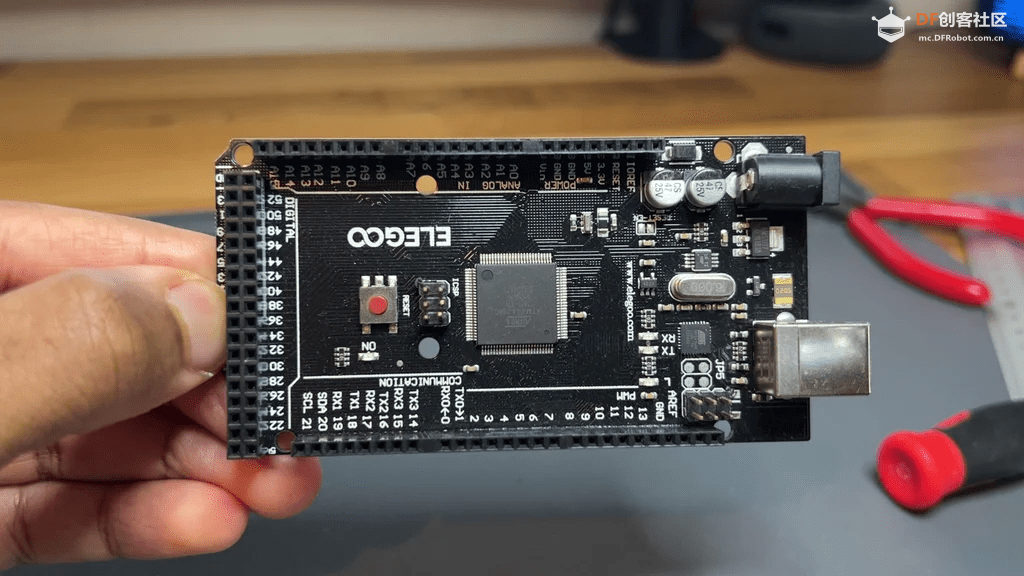
为了更好地了解整个制作过程以及查看六足机器人的实际运动,可以先看这个视频。 3D 打印 这个项目所有的机械部件都是通过 3D 打印的。大多数部件可以使用 PLA,标准设置和最少的支撑来打印。 一条腿由以下部分组成:leg_mount.stl, coxa.stl, femur.stl, tibia.stl,总共需要打印 6 次。 其余的部件组成了机器人的基座,只需要打印一次,mounting_post.stl 是例外,需要两份。
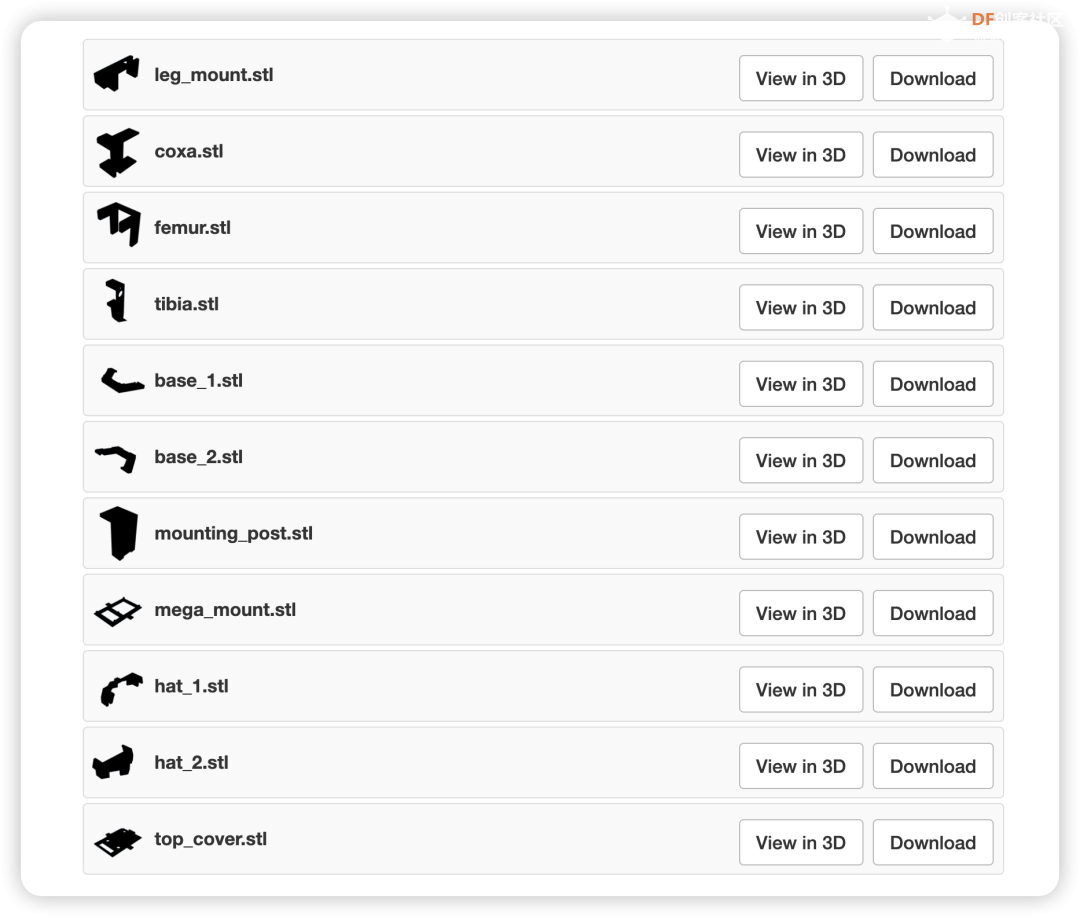 3D打印文件可以文末打包下载。 腿部组装 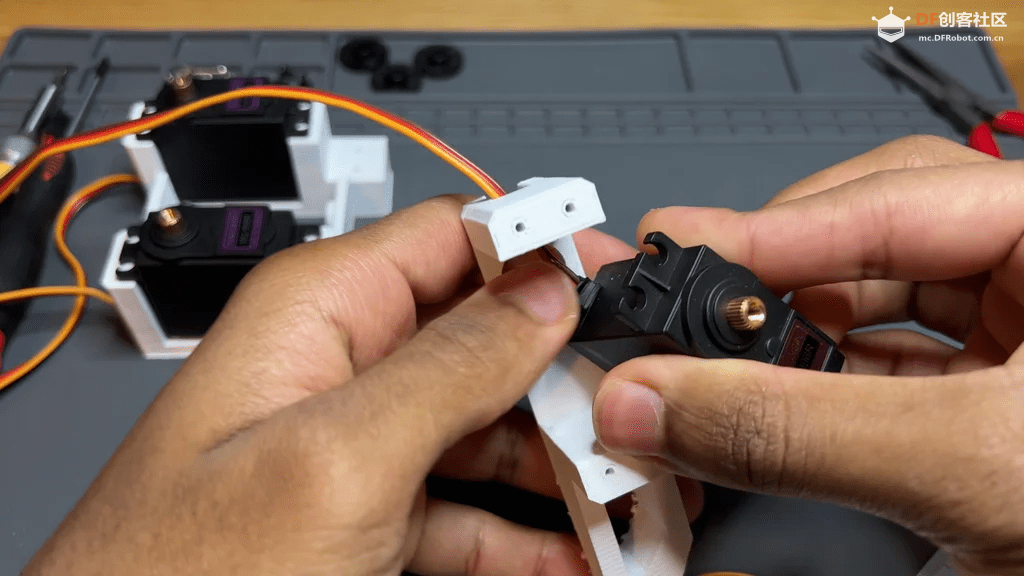 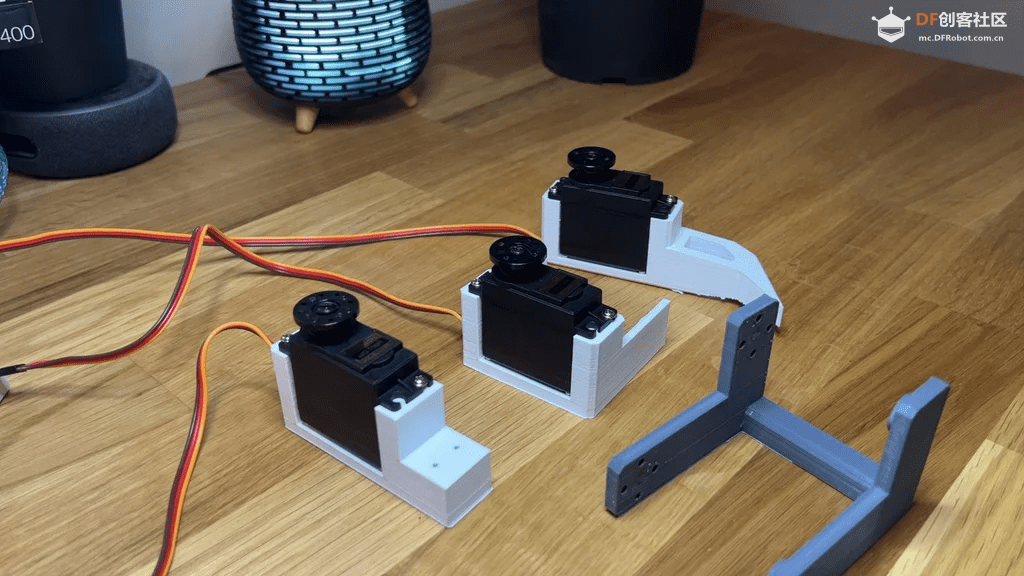  首先,将伺服电机插入腿部支架(leg_mount)、髋节(coxa)和胫骨(tibia)部件中——确保小心地将伺服电缆穿过每个部件中的布线孔。尺寸可能会非常紧,但所有部件应该能够紧密地配合在一起。 确保每个伺服电机都设置为 0 度位置,将伺服臂连接到每个电机轴上。 现在所有部件都已摆放好,组装一条腿应该相当简单。  我们希望腿部有尽可能大的活动范围,所以建议按照上面的 GIF 所示的角度连接关节(当腿被拉下时)。 腿部代码 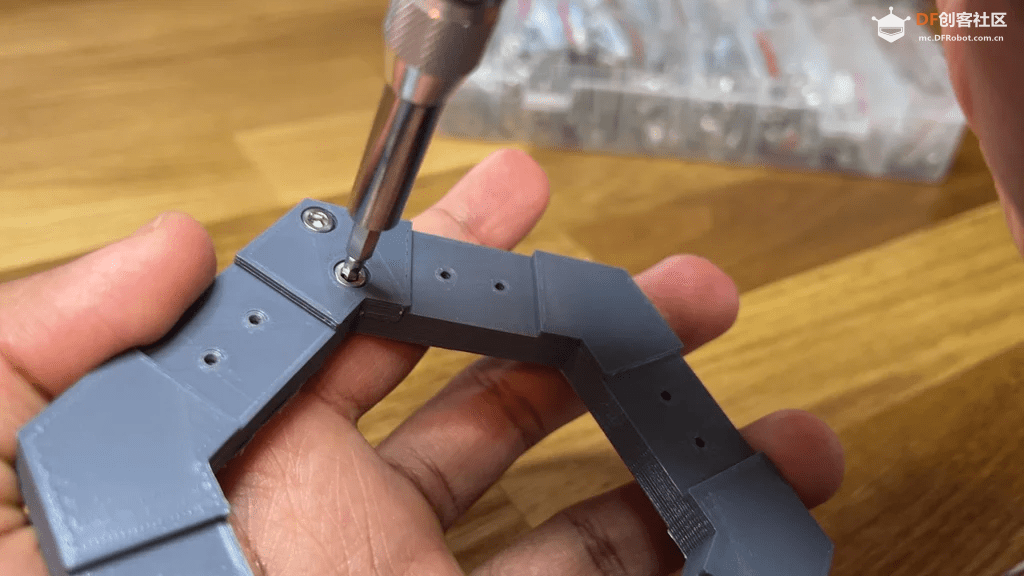  下一步是让腿动起来。每个伺服的 3 个引脚需要连接:红色连接到 5v 电源或电池,棕色连接到地线,黄色连接到 Arduino 上的数字引脚。  为了测试腿部关节,这段代码片段可以上传到 Mega: 逆向运动学  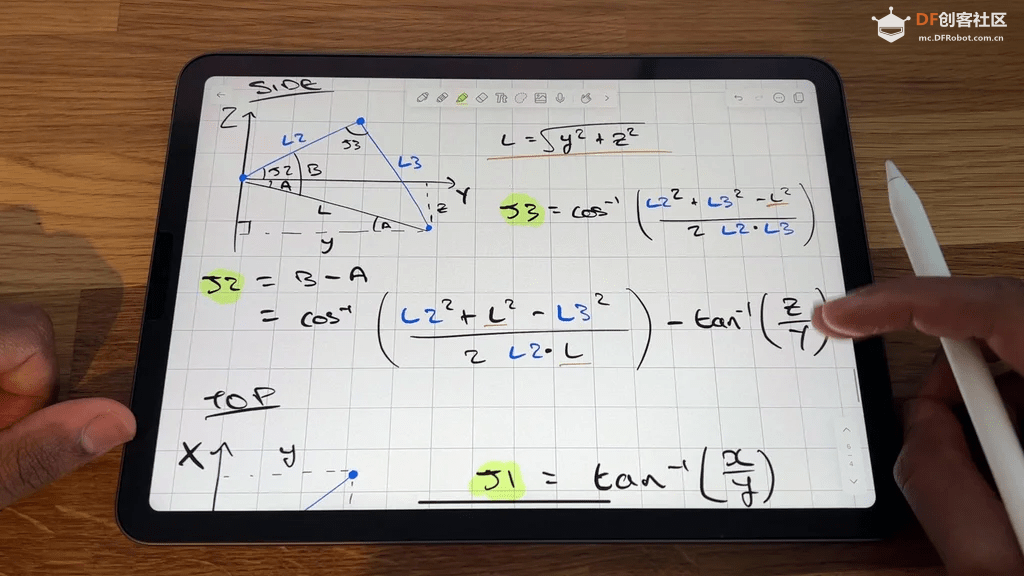 将腿的末端放置在特定点需要计算腿的逆运动学。结合之前的move_joints()代码,下面的代码可以用来移动到 XYZ 位置: 继续组装和编程 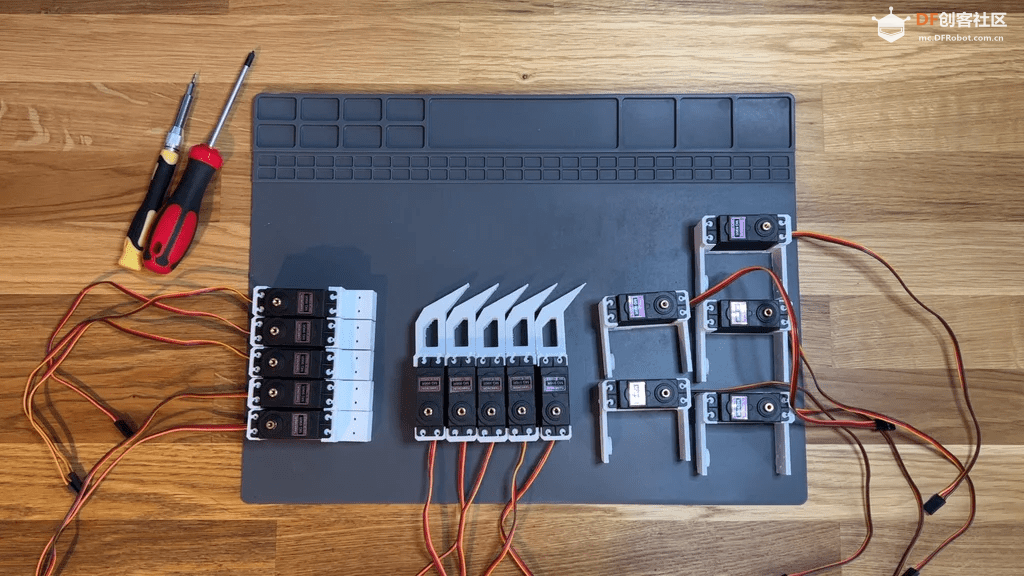 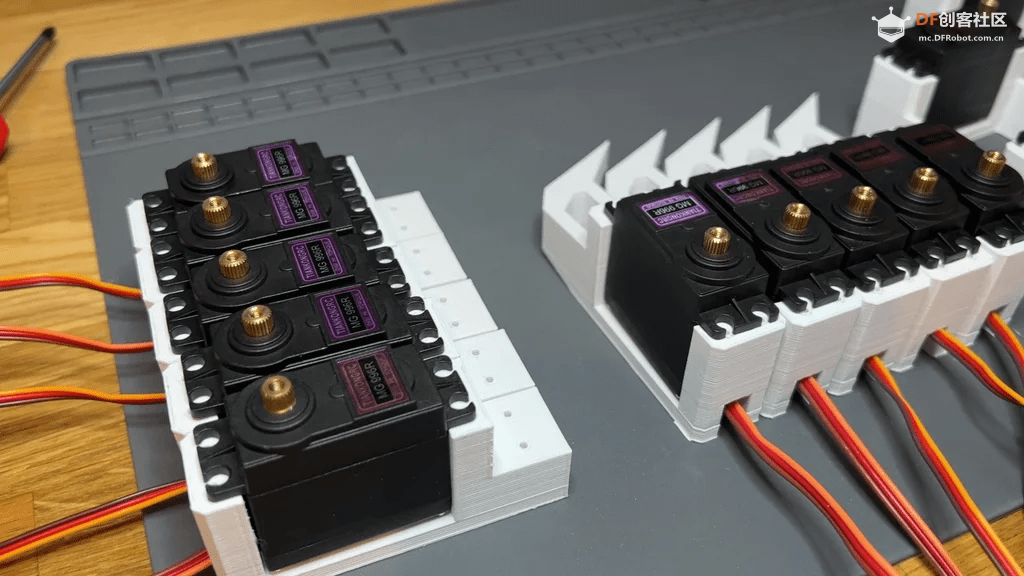 其余的六足机器人腿可以按照之前完全相同的方式打印和组装。由于有 6 条腿,总共需要 18 个舵机。 连线 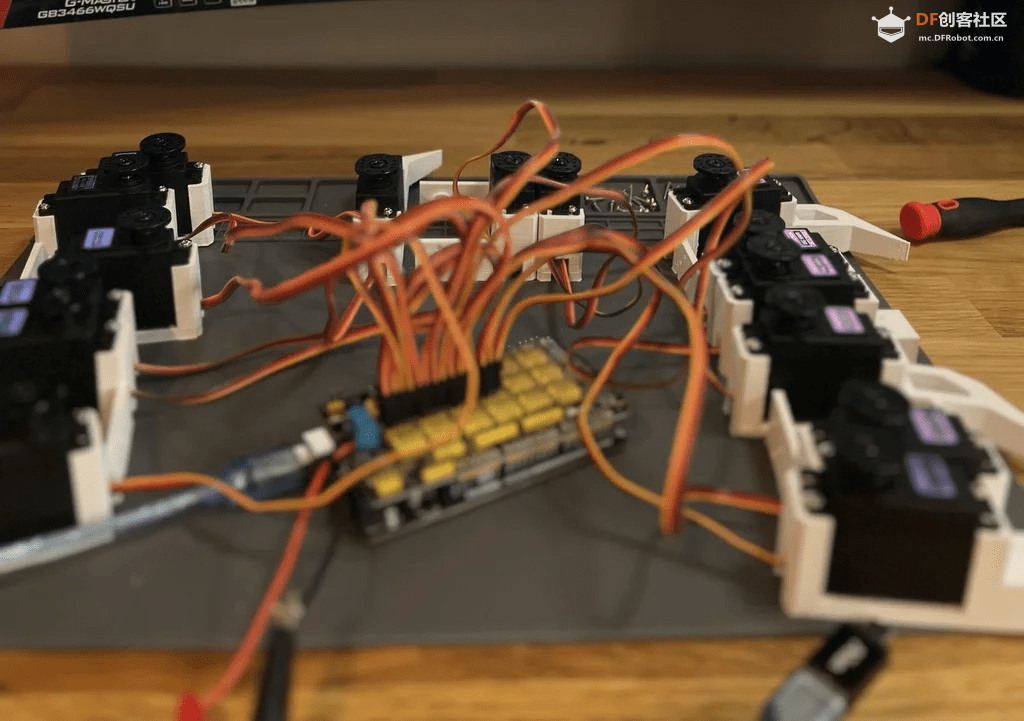 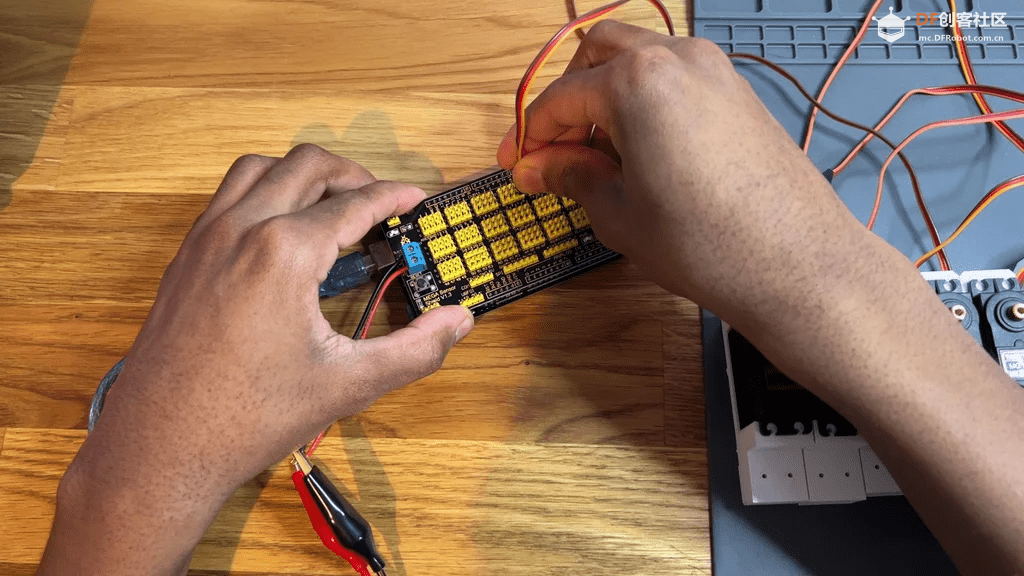 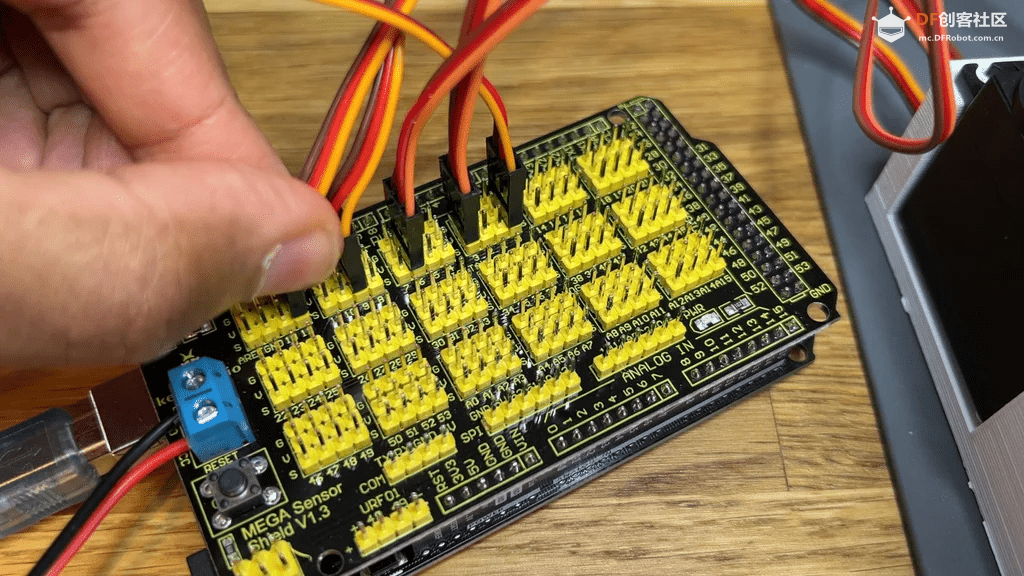 将传感器扩展板连接到 Arduino MEGA,并连接每个舵机。拍照或记录每个舵机连接到扩展板上的哪个引脚。 将 5V 和 GND 线连接到传感器保护板上的接线端,以备后用。 安装腿部  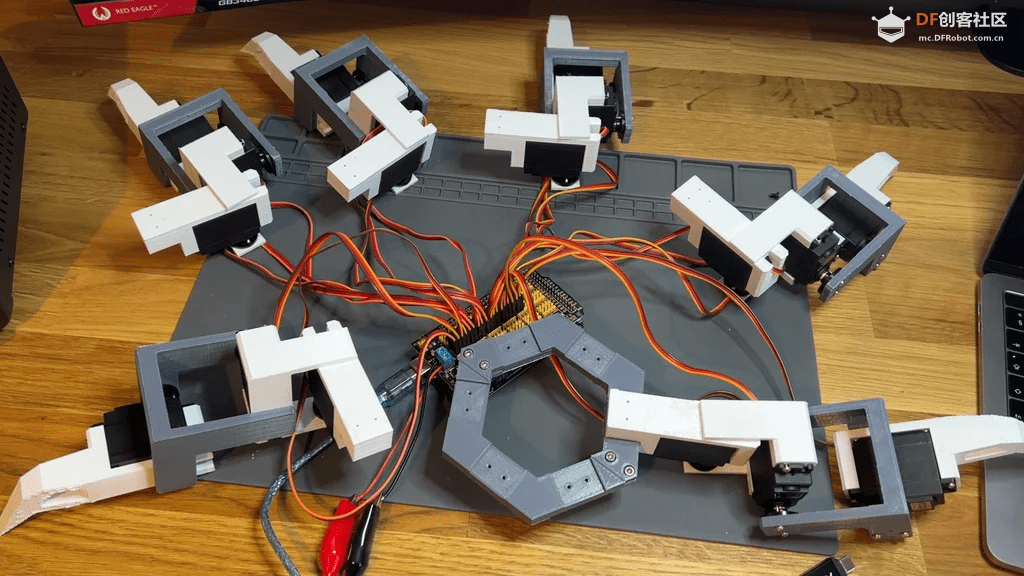 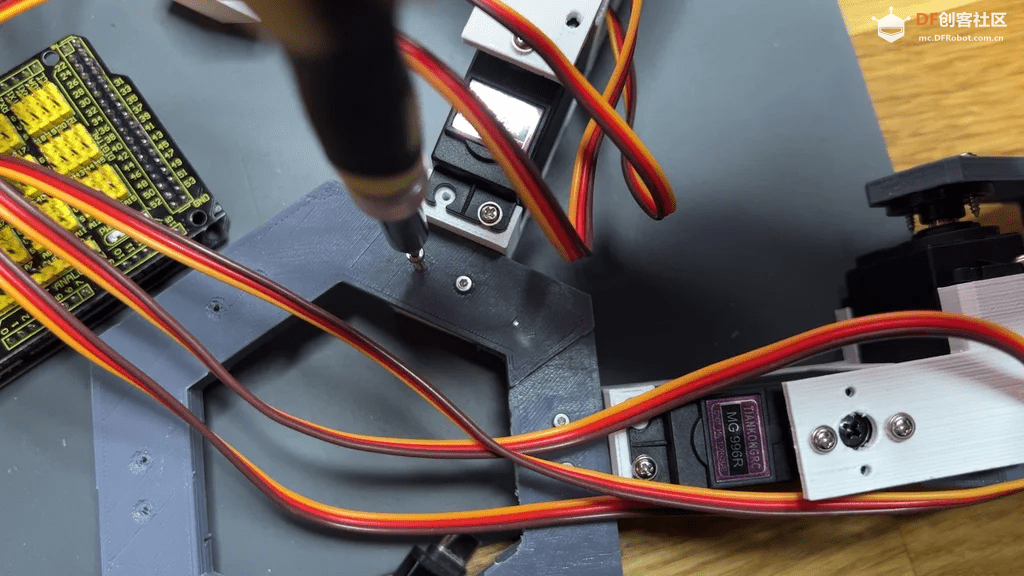 使用 M3 螺钉,将剩余的腿固定到六足机器人底座框架上,留下两条平行的腿未固定,以便进行下一步。 底盘组装 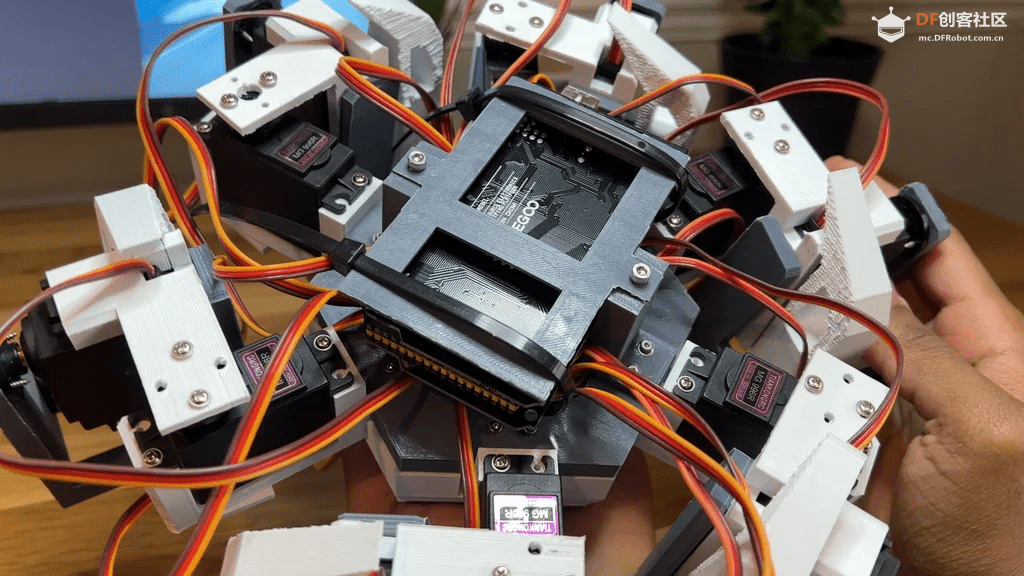  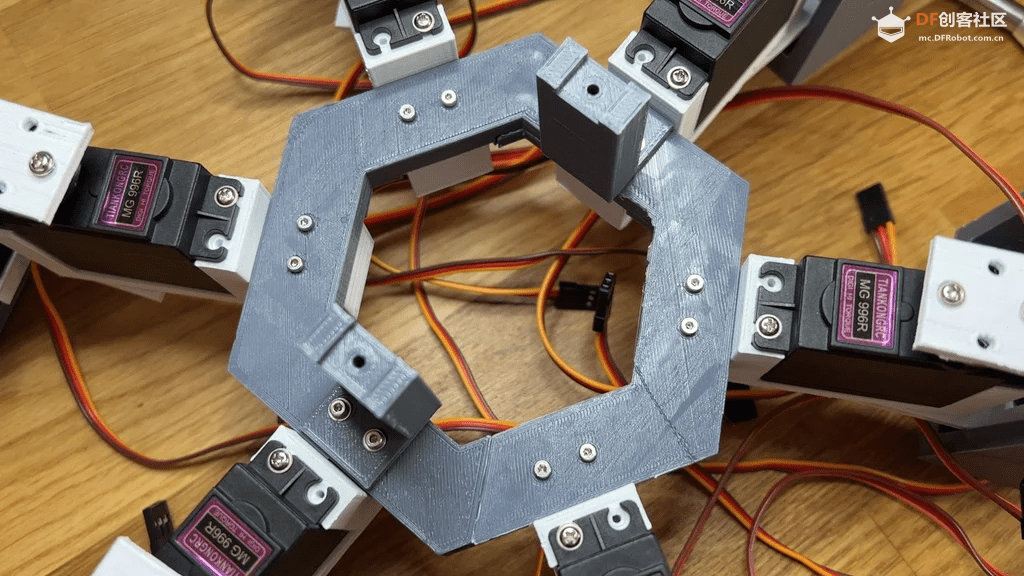 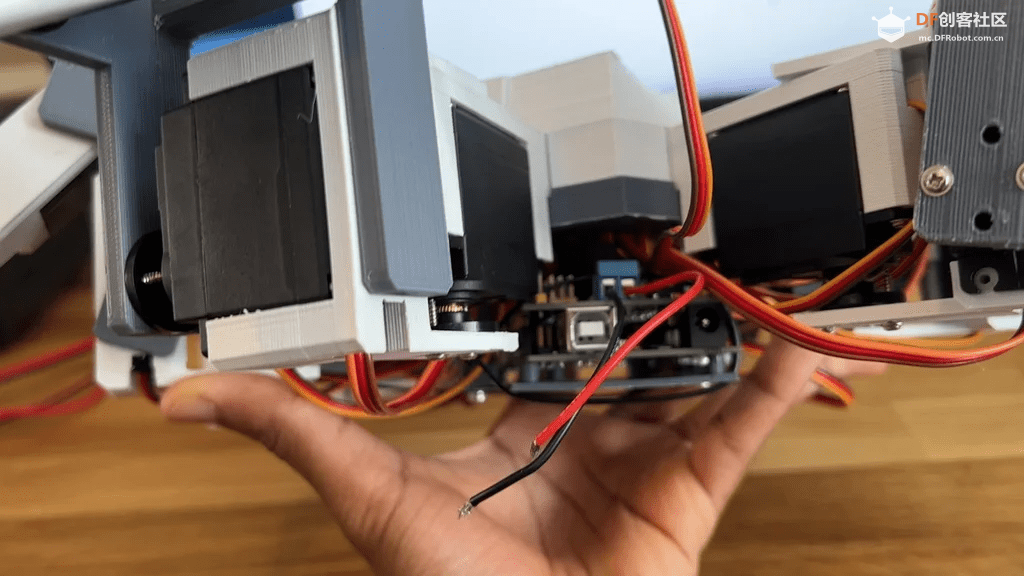 将六足机器人翻转过来,将剩下的两条腿连接到底座框架和两个安装柱(mounting_post)上,如图所示。 将 Arduino 用支柱(或扎带)固定到 mega_mount 上,并拧入安装柱。 顶盖电子设备 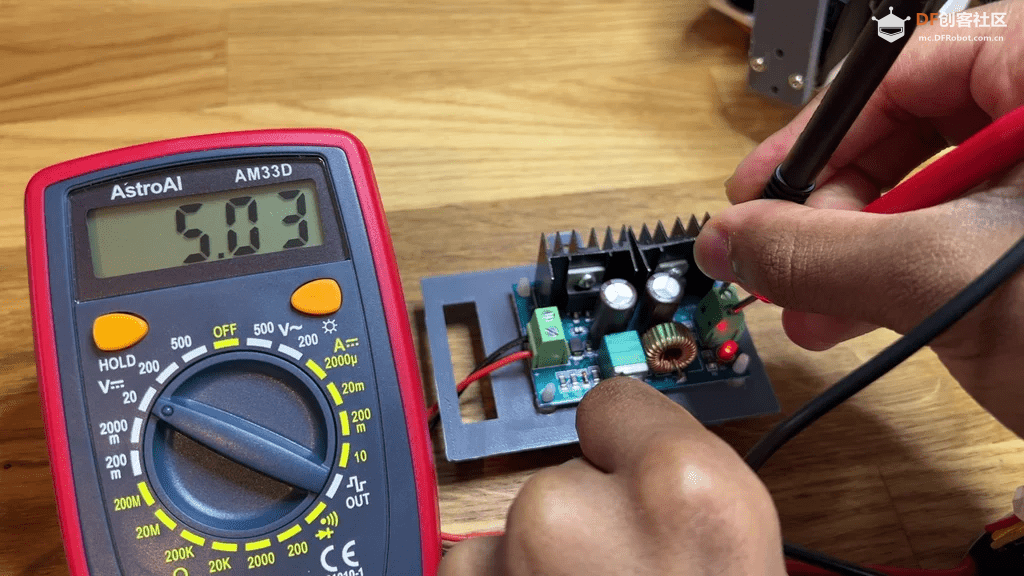 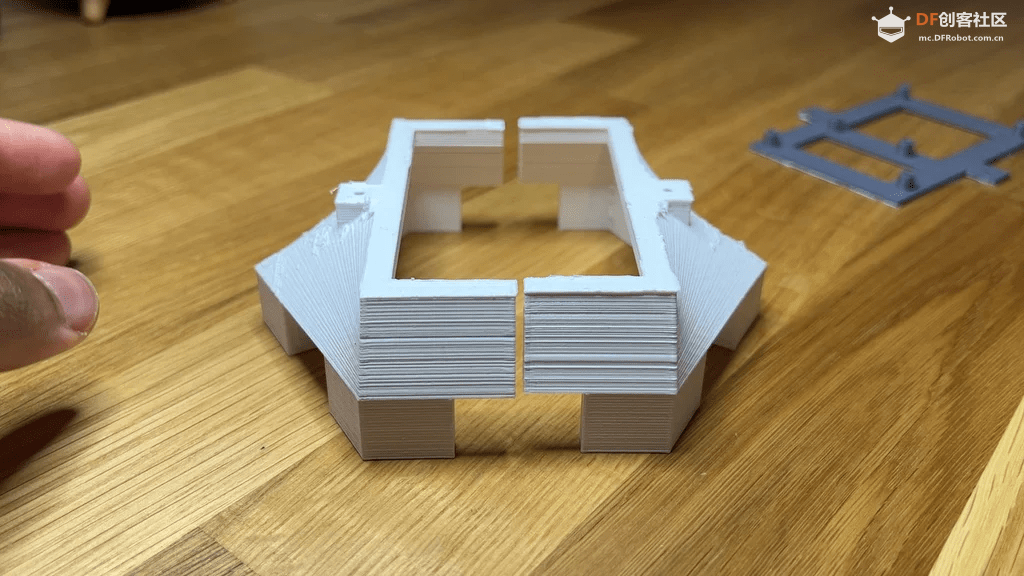 将 DC-DC 降压转换器模块安装到顶盖(top_cover)上。使用万用表应将其设置为输出 5V。 现在可以使用螺钉将两个半部分 hat_1 和 hat_2 固定到顶盖上。 将传感器扩展板的 5V 和 GND 线连接到降压转换器输出端。 将 XT60 电池连接器焊接到一些电线上,并将这些电线拧入降压转换器输入端。记得检查并确保此连接和上一个连接的极性正确。 步态代码  最后一步是将代码 hexapod.ino上传到 Arduino。在代码中有实现六足机器人简单波动步态的函数。 代码可以在文末打包下载。 代码的快速解释:
运动示例
有关六足机器人步态更多信息可在网上找到。 ⚠️ 在上传代码之前,请确保将偏移量和引脚分配更改为正确值。 完工   原文地址:https://www.instructables.com/3D-Printed-Hexapod-Robot/ 项目作者:zeroshot 译文首发于:DF创客社区 转载请注明来源信息 |

213.15 KB, 下载次数: 3530



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






