|
9318| 0
|
[项目] Arduino与LEGO结合的六足机器人 |
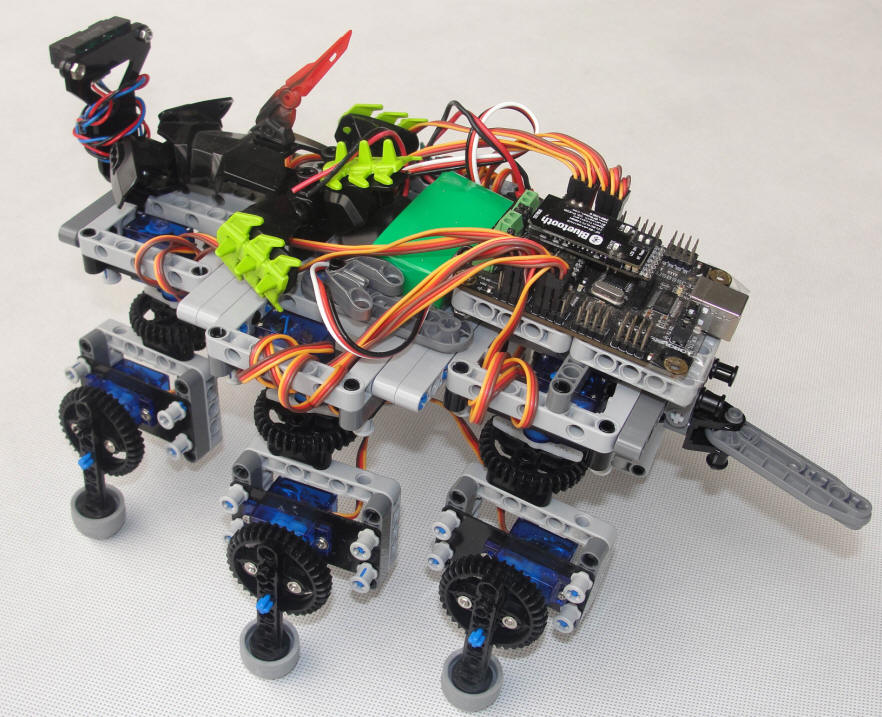 ATHLETE机器人是工业级机器人,对于机器人发展的热点,也是全世界创客爱好者最热衷的探索对象,网络上出现了各种算法、材质和结构的六足机器人资讯。最近我也做了个“六足”,之前,试图查阅一些资料,主要是玩,想走些捷径,但是,后来自己想想,如果只是让六足机器人走起来,实际上并不难,就是“三角步态”策略即可,即三条腿着地,另外三条腿抬起迈出步伐,然后交替反复。所以就直接采用32路舵机控制板编制了舵机动作序列,让12个舵机驱动的六足机器人成功地行走起来了。看看我制作的机器人行走姿态吧,六足style! 详细设计过程见博客,网址:http://www.eefocus.com/zhang700309/blog/13-03/291894_b2e9f.html。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






