|
7654| 2
|
LabVIEW蓝牙控制乐高六足机器人 |
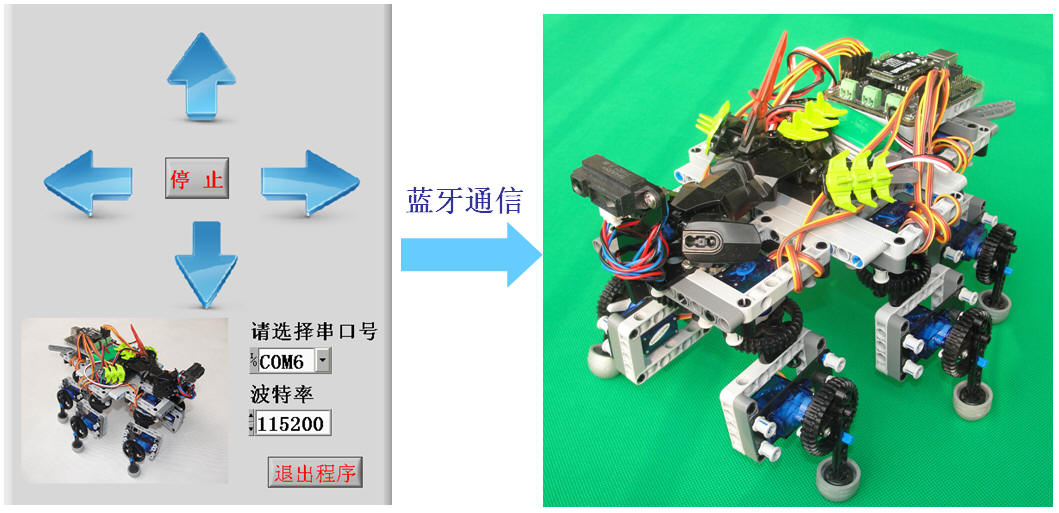 上篇文章《Arduino与LEGO结合的六足机器人》中,讲解了使用32路舵机控制板的方法,该板自带了一款舵机控制软件,我用该软件控制着六足机器人的12个mini舵机做动作,通过“示教”法一步步地确定了前、后、左、右4个动作组,然后把动作序列文件下载到机器人身上舵机控制板的存储卡中,并在线运行,测试机器人的运行是否符合预期。 《Arduino与LEGO结合的六足机器人》文章的网址:http://www.eefocus.com/zhang700309/blog/13-03/291894_b2e9f.html。 在这篇文章中,我用LabVIEW软件设计了一个六足机器人的人机控制界面,设置5个互动按钮。界面设计目的是,当按钮按下时,会把一行字符串命令通过蓝牙串口,无线发送到舵机控制板,执行事先下载到其存储卡中的前后左右及停止动作序列文件,让机器人“活”起来。 博客文章地址:http://www.eefocus.com/zhang700309/blog/13-03/292196_ead67.html。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







