 推荐
精华
推荐
精华
|
96272| 41
|
[项目] 【进击的多足】自制改装的遥控怪兽——更新二代来了!
 [复制链接]
[复制链接]
|
|
本帖最后由 Double-Demon 于 2013-12-23 02:35 编辑 在一期TED中,我看见了这样一幕:一只几米长的“怪兽”,背部有“鳍”,身下有脚,整体保持着令人惊诧的平衡。这就是大名鼎鼎的“海滩怪兽”。它不用“进食”,无需任何燃料,唯一的驱使力量是风。荷兰动能艺术家严森(Theo Jansen)培育出这些怪兽。如今,这些“怪兽”不光能够躲避各种天敌,而且甚至可以具有了生物的最基本能力繁殖。这个作品来自瑟·严森(Theo Jansen),出生于1948年的荷兰动能艺术家。求学于代尔夫特理工大学物理系,后转为学习绘画。上世纪80年代因“飞行UFO项目”成名。上世纪90年代开始“海滩野兽”系列动能艺术项目,在世界各地做展。 一看见这只怪兽,我就被其独特的单自由度,由曲柄驱动的斯蒂芬森型六杆运动链(连个曲柄摇杆机构和一个平行四杆机构)的脚步设计所吸引住了。在机器人中,大多数的多足(尤其六足)都以蜘蛛等爬虫类为原型,采用舵机驱动。虽有其优势之处,但在承载能力,行进速度上,都有着巨大限制。那为什么不能在机器人上采用这种腿部结构呢。恰巧之前日本的《大人的科学》推出了严森的风能怪兽的玩具,所以我打算现在这上面先进行改进。 初步采用的是基于蓝牙的手柄控制,方便控制~ 新一期的视频奉上~ 一代完成图(为了防止前后跌倒,加装一个小结构解决问题) 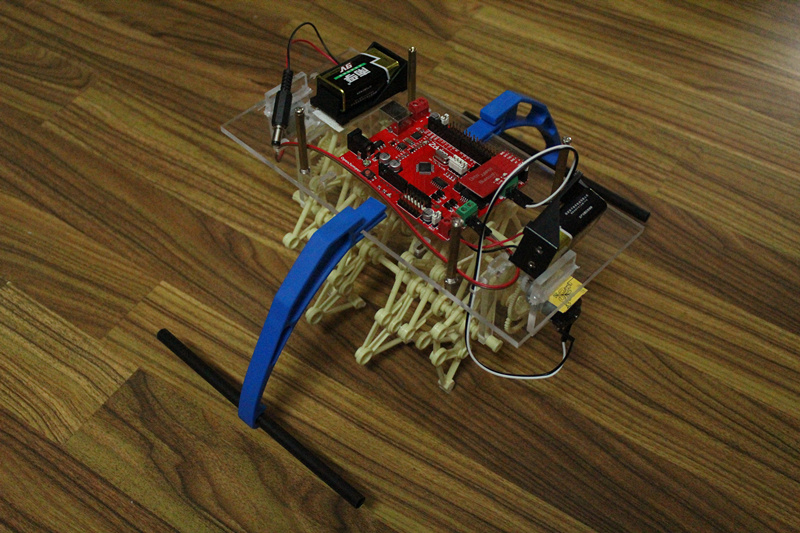 初步改装,加上亚克力板,准备为齿轮开槽  俯视图~  换个角度来一张 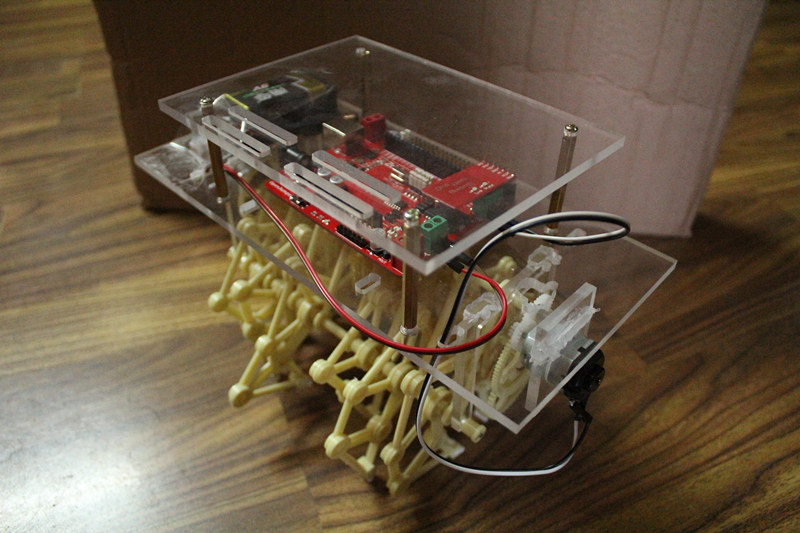 装上驱动板,测试行走性能  测试加装的电机  二代来了!!!~在一代完成后,二代紧随而至!! 先来张一二代合影图 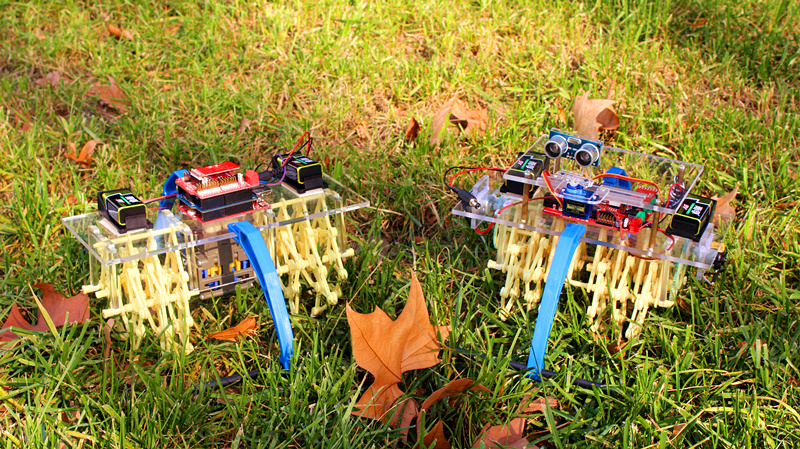 二代使用的是田宫的发动机组,通过使用3D打印的黑轴联轴器,直接输出动力,使运动更加平稳!! 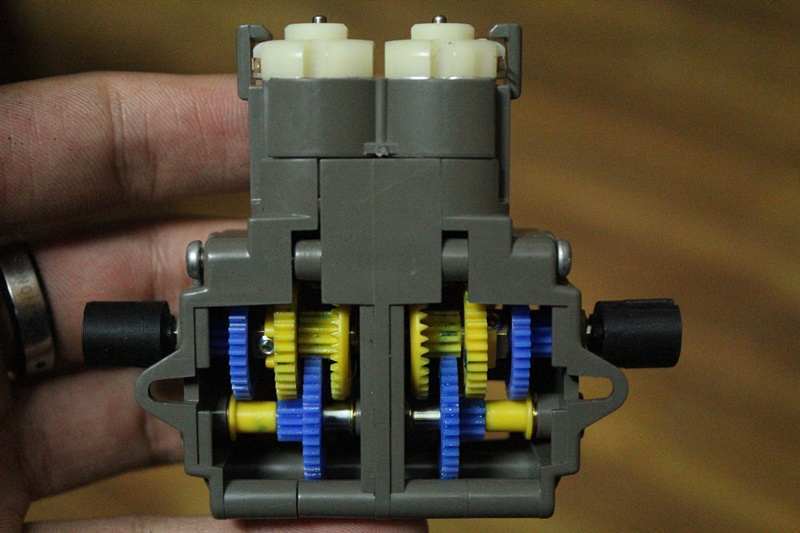 |
腿部的结构及其脚步的轨迹
联轴器俯视图,可以更清楚看见结构
组装好的物理平台
装上电机测试的样子
再来张一二代合影
社区活动向导 发表于 2013-12-8 23:27 可以啊~这个是可以避障的啊~在完成版里已经戴上了超声波模块了。:lol |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






