|
23682| 8
|
[求助] 用Ardublock玩转六足虫虫机器人 |
|
用Ardublock玩转六足虫虫机器人 按照虫虫教程组装起来的虫虫就可以直接跑起来,想要了解虫虫跑起来的原理,可以看到附件里长长的一堆代码,其实作为一名有一些编程基础的伪小白,看到长长的代码也是真真头大了。本贴专门针对那些想要了解虫虫机器人原理但是代码小白的小朋友们,我们一起来玩儿Ardublock吧! 一.虫虫玩法 按照虫虫机器人教程组装起来的虫虫,因为出厂就已经烧录了代码,所以可以直接这么玩儿: 1. 在前方没有障碍物的情况下会一直向前走 2. 如果前方大约4.73cm以内遇到障碍物,(想问我为什么知道这个确定的距离,请参考:SHARP GP2D120X红外距离传感器 (4-30cm)的参考公式,网址为:https://wiki.dfrobot.com.cn/_SKU_SEN0143_SHARP_GP2D120X%E7%BA%A2%E5%A4%96%E8%B7%9D%E7%A6%BB%E4%BC%A0%E6%84%9F%E5%99%A8__4-30cm_),先后退5步,然后左转5步,然后判断左边和右边哪边没有障碍物,就转向哪边 二.虫虫创新玩法及参考程序 如果觉得虫虫机器人这样玩儿还不够过瘾的话,我们还可以想出其他的创意玩儿法。不过在考虑其他玩法之前,我们先来分解一下虫虫的程序。 在之前分析虫虫机器人的玩法之后,我们可以了解到虫虫主要可以实现前进,后退,左转和右转,下面列出了前进和左转的Ardublock编程图,可以参考,同时大家也可以考虑一下后退和右转该怎么实现呢? 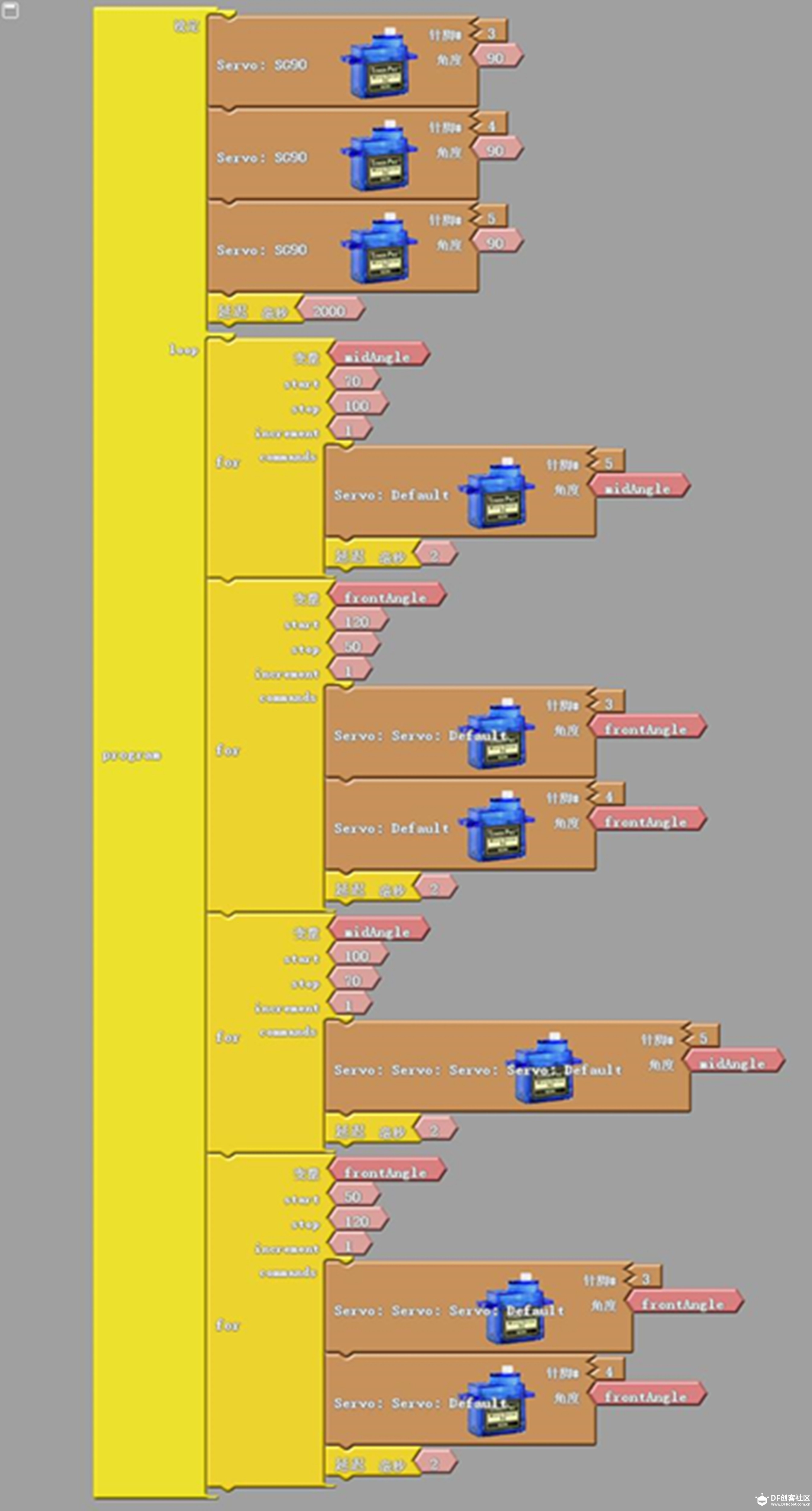 前进 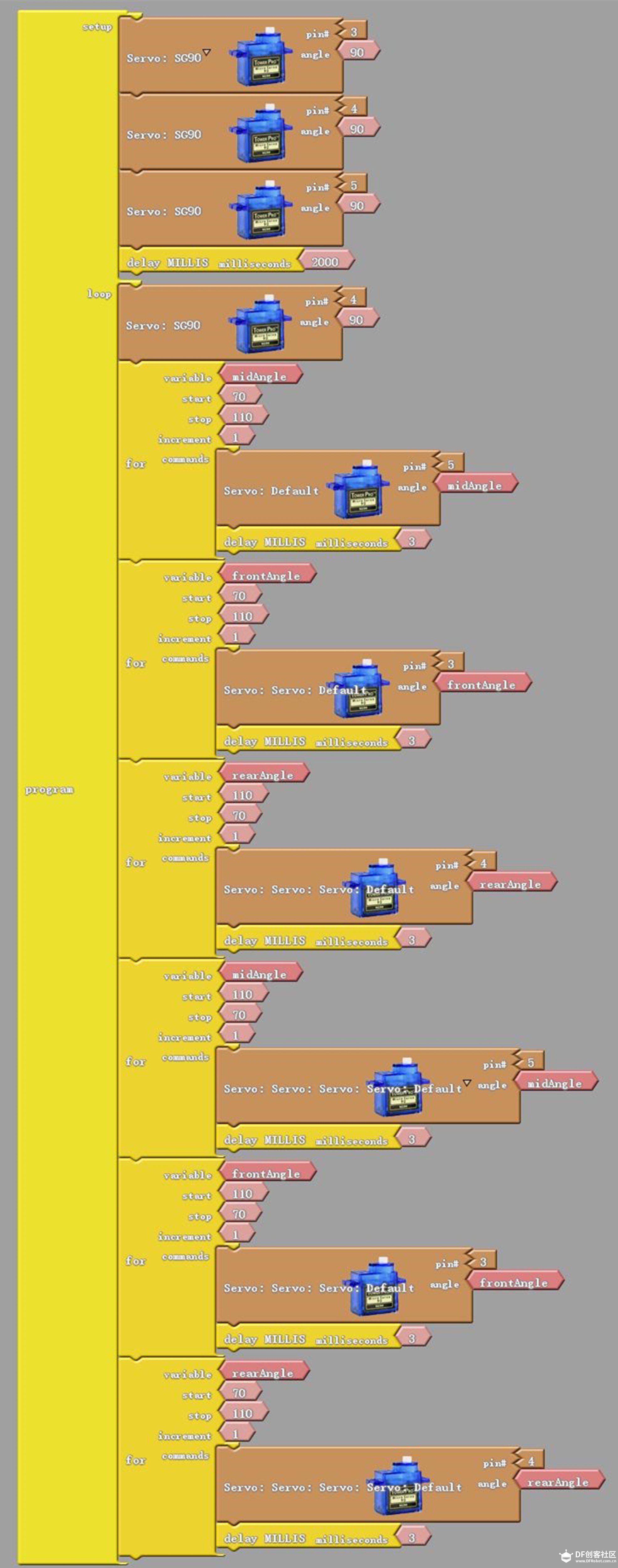 左转 把虫虫前进,后退,左转,右转的编程分别实现了之后,我们就可以结合虫虫的红外距离传感器和光敏传感器想一些创新的想法了,下面列出来一些简单的创意想法。 1. 跟随虫虫机器人 如果你想要虫虫跟着你走,那么我们就可以这样实现:  跟随虫虫机器人 2. 避障后退虫虫 如果你想你的虫虫在前方遇到障碍物之后可以后退,你可以这样做: 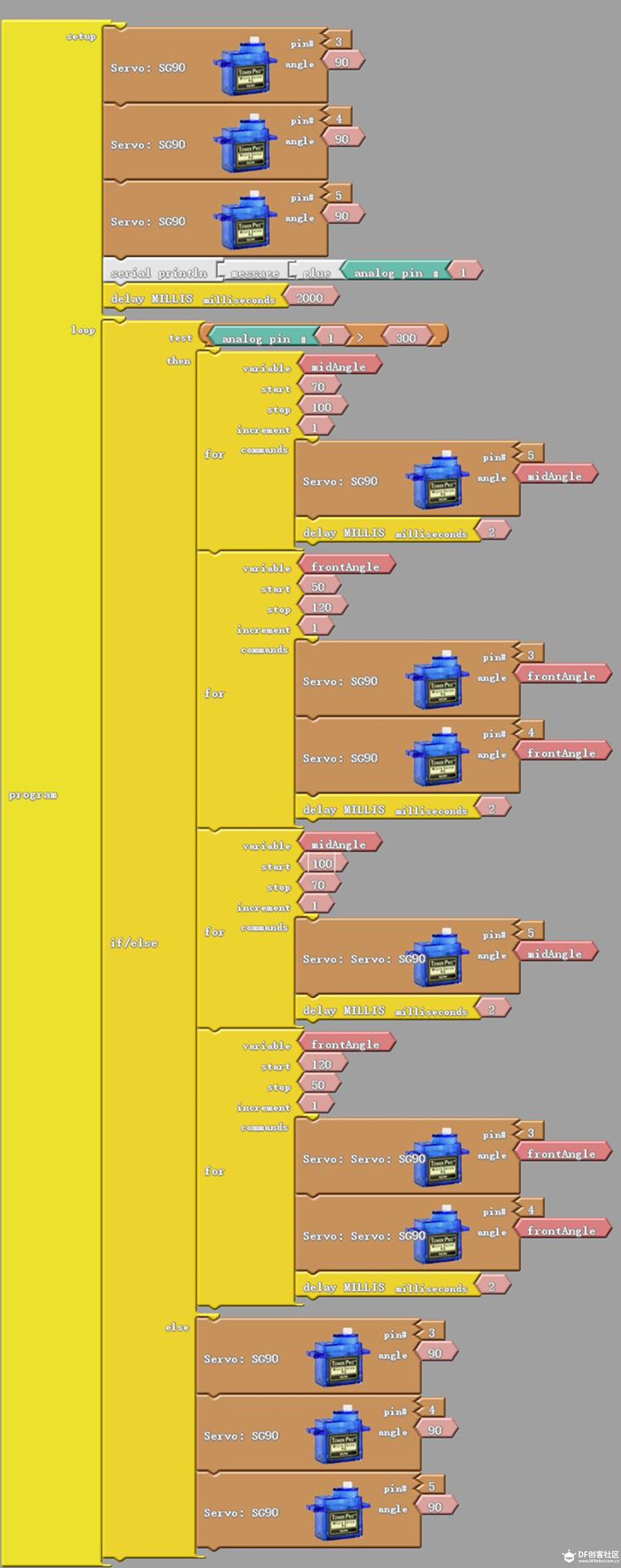 避障后退虫虫 3. 光敏左转 我们还可以让虫虫判断左右的光线强弱,决定是否要向左转: 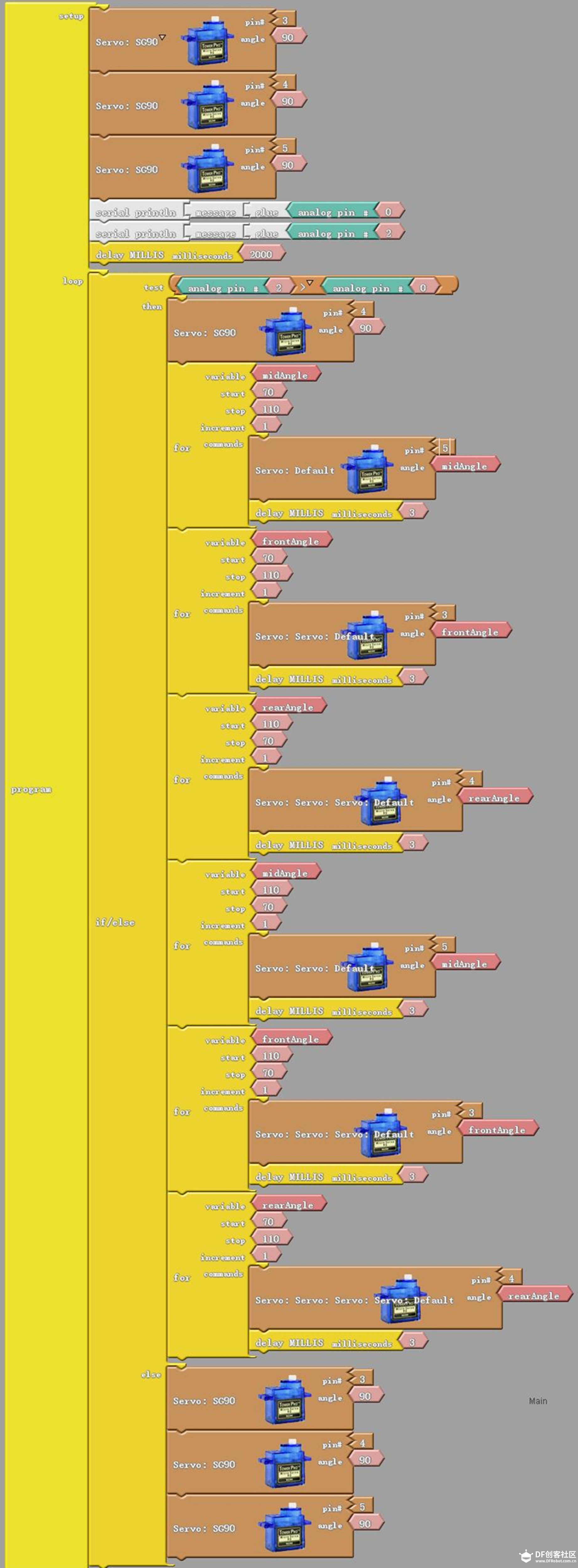 光敏左转 通过上面这些简单的Ardublock程序,我们对虫虫机器人的原理有了基本的原理,小朋友们还有其他的创意玩法吗? |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







