|
51736| 30
|
[项目] 元宵节|造一把酷炫的金刚狼手爪吧! |

 每天千遍一律的生活,就好像复制粘贴,总想着去改变一下。脑子转了一圈,最实际的办法就是动手造起来,这不!元宵节也到了想玩点特别的,每次看电影金刚狼都被男主角的手爪所帅哭,所以本次的创客项目就是金刚狼手爪!哈哈哈~~~  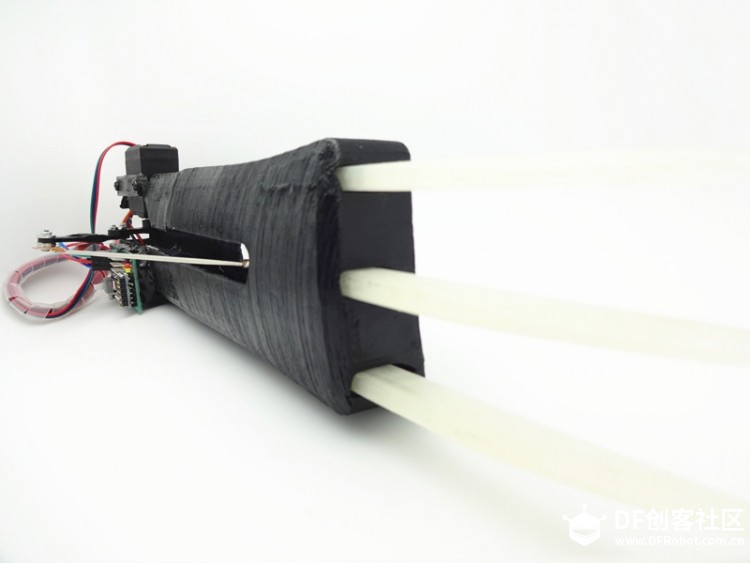 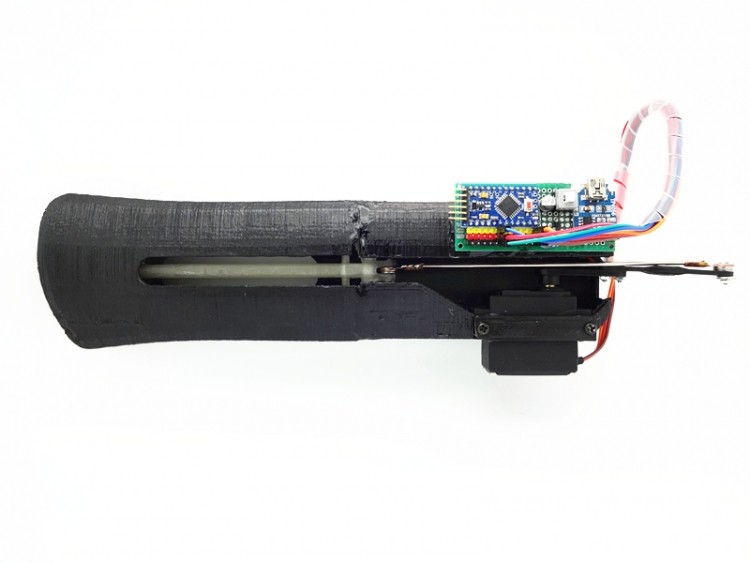 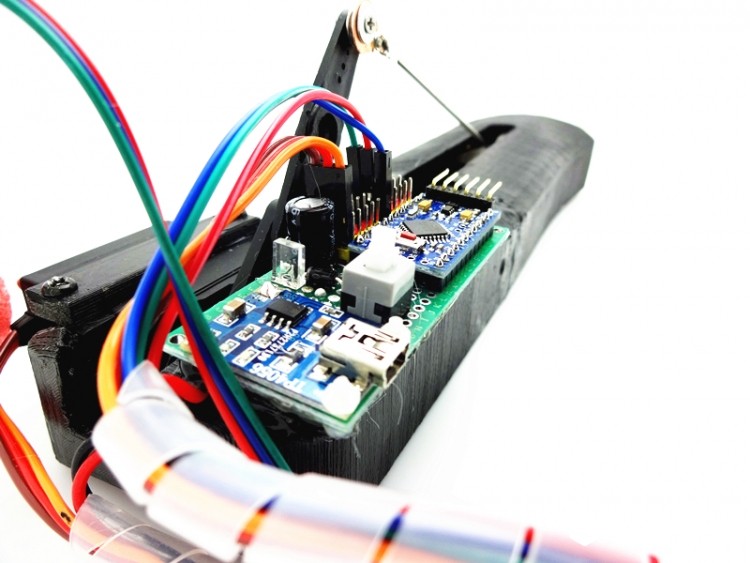 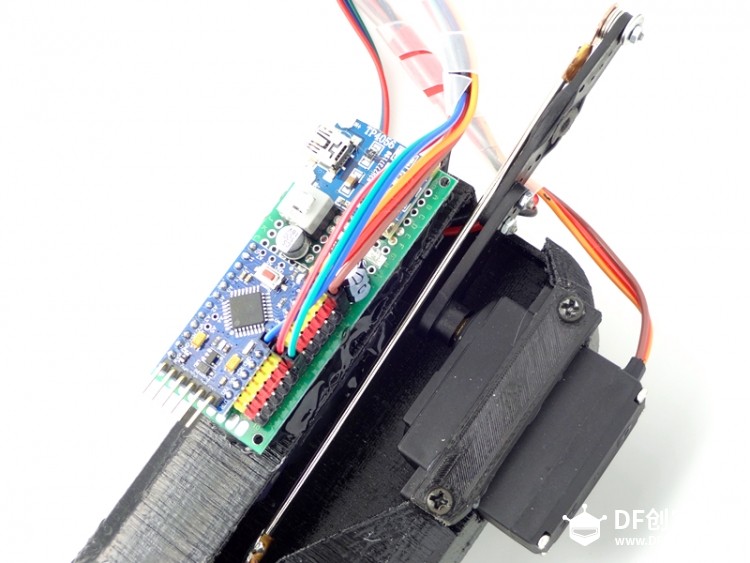 先看一个由肌电传感器控制的金刚狼手爪视频 本次制作的金刚狼手爪主体全由3D打印出来,控制部分为Arduino mini板与一个MG995舵机,国外原版版是采用一个肌电传感器来控制手爪的伸缩,可悲的是国内买不到肌电传感器,所以我用一个按钮开关传感器来代替肌电传感器,工作原理是当我握住拳头的时按钮开关闭合手爪伸出,松开手掌按钮开关分开手爪自动收回,这样用最简单的方法做到完美的妥协。  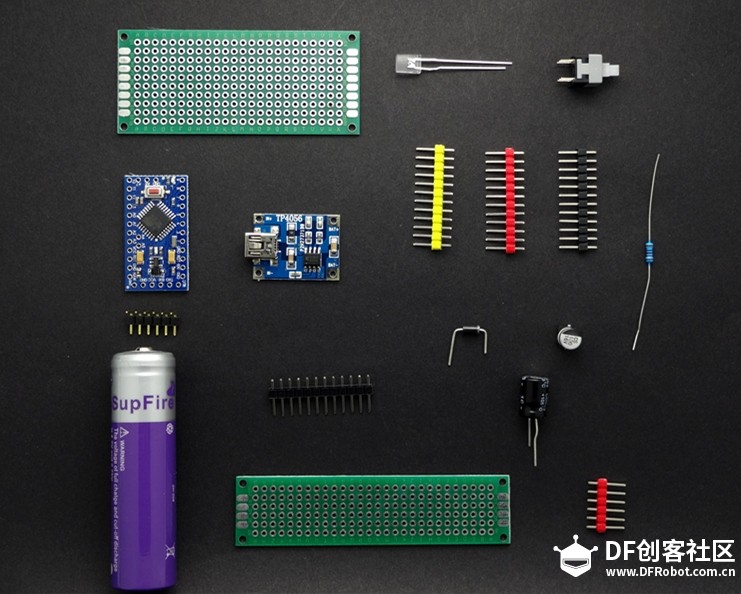
制作步骤 1、打印主体部分手爪、舵机座、伸缩舱。  2、制作拉杆,将0.5mm的铜片剪成灯泡状并将中间钻孔,用电烙铁将其焊接在光轴两端。 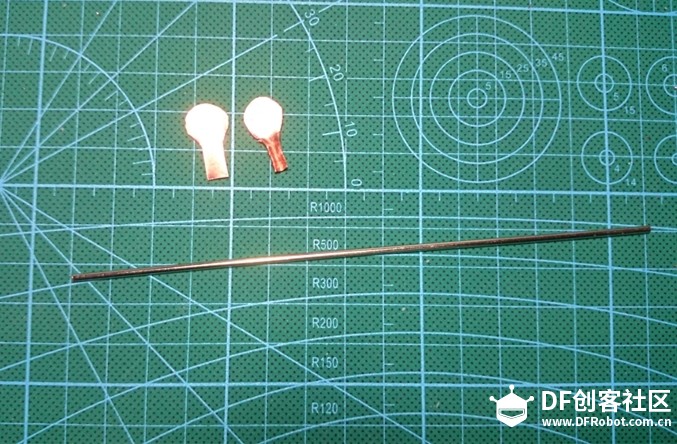  3、制作舵机加长拐臂,将两个舵机拐臂用螺栓加长在一起,拐臂制作完成。   4、制作按钮开关传感器,切割一块洞洞板将点按开关、10k电阻按下图电路制作焊接。 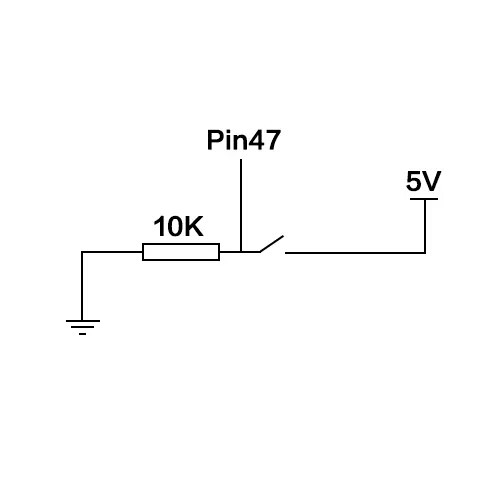  5、焊接Arduino板和设计焊接一块Arduino扩展板,扩展板主要是作用是方便舵机及传感器接入,除此之外考虑的舵机动作时激磁涌流造成电压波动,加入电容整流二极管起到稳压限流作用,使用彩色的排针焊接电源正负极及Arduino引脚,我焊接的扩展板还将锂离子充电模块电源开关焊接在一起。 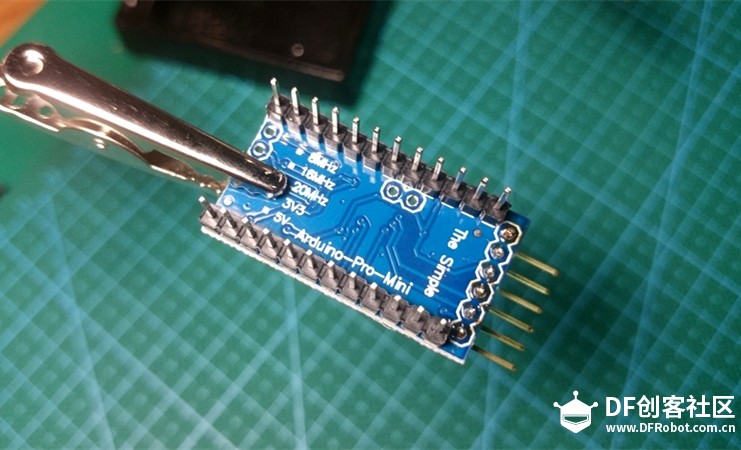 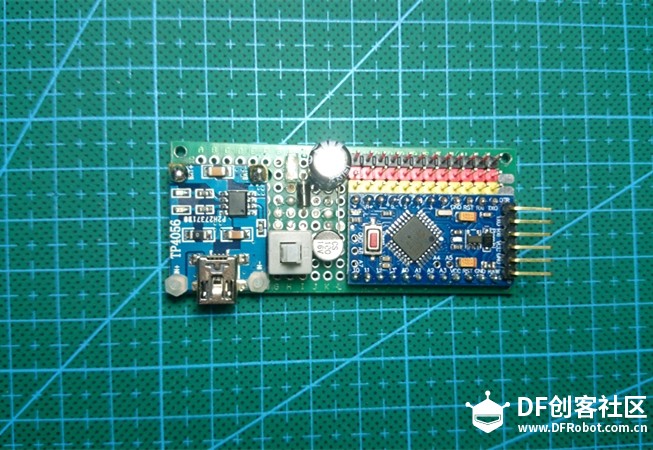 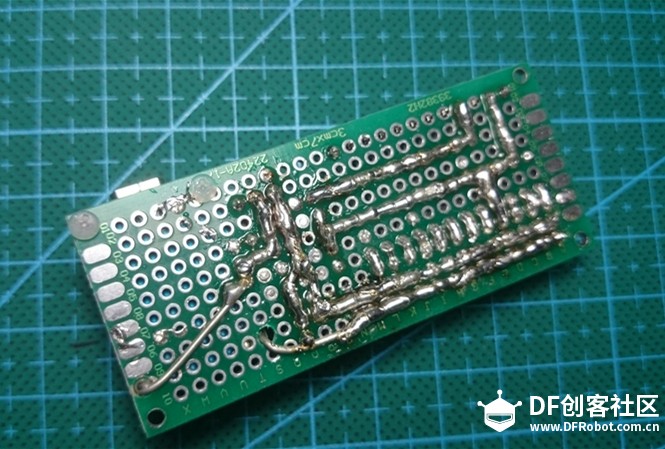 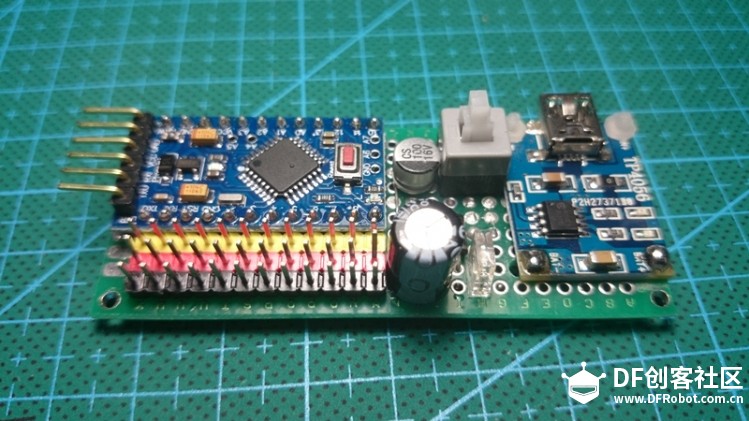 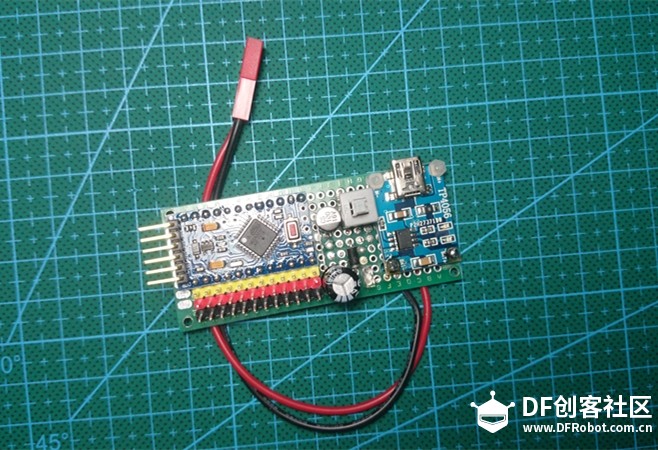 6、18650锂离子电池接线,准备电源插座线、透明热缩管、热熔枪、泡沫板制作电池。    7、将拉杆与手爪用螺栓连接起来。 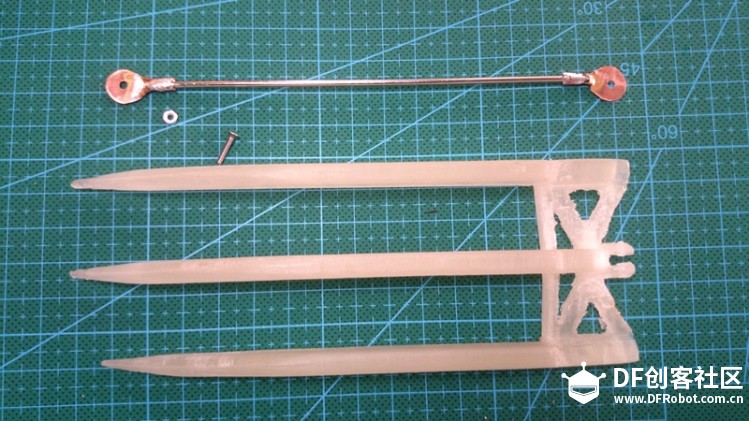 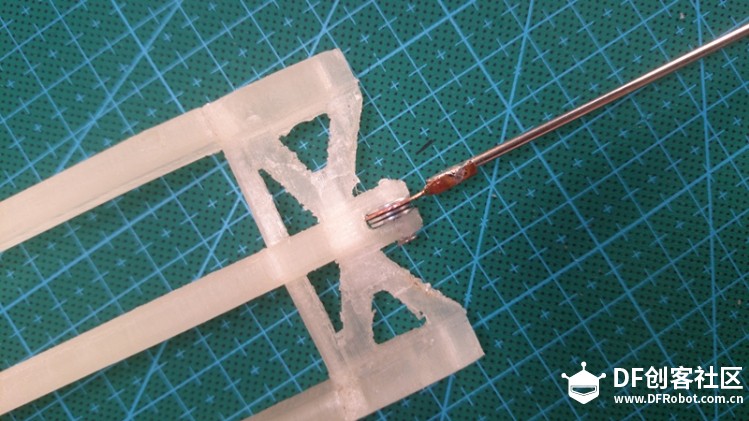 8、将手爪装入伸缩舱里,并把金刚狼手爪伸缩舱与舵机电池座用哥俩好胶水粘接起来,并在粘接处喷上黑色油漆装饰。  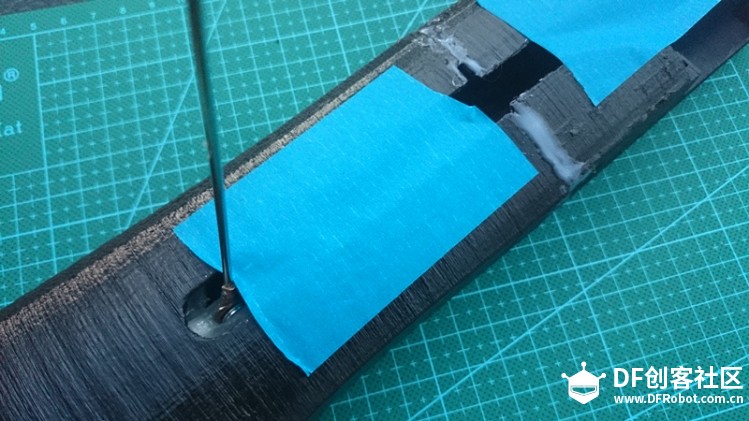  9、将电池安装上并用热熔胶固定,装入舵机安装拐臂并将拉杆用螺栓连接,将控制板用热熔胶粘接在尾部,按钮开关传感器接Arduino板3引脚,舵机接Arduino板9引脚。 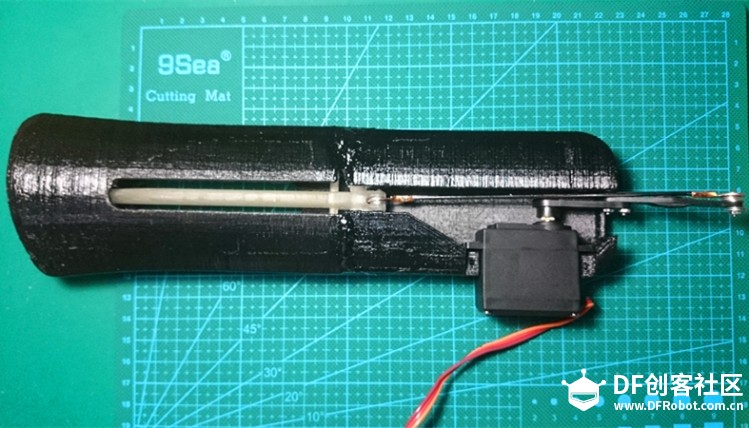  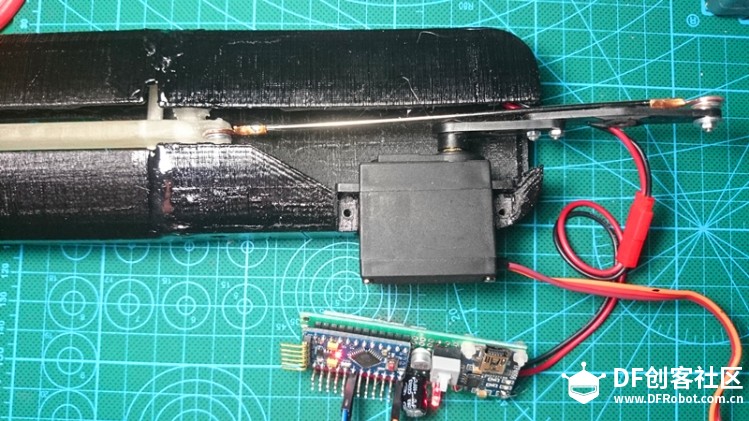 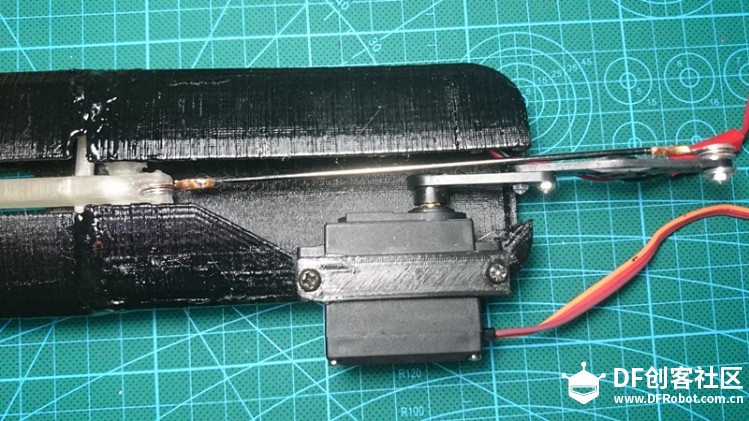 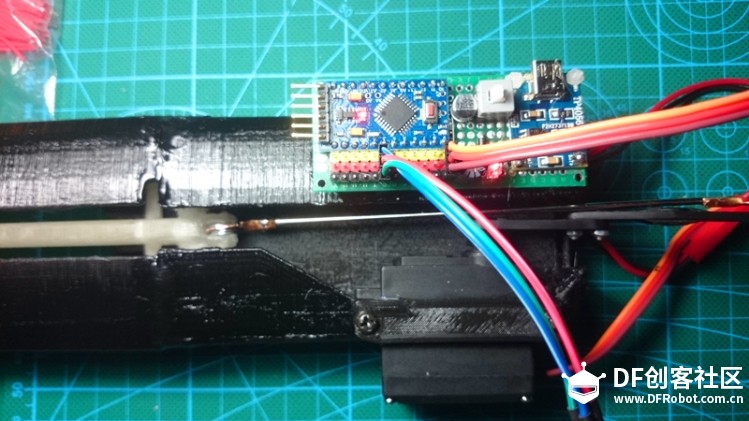 10、上传Mind+金刚狼控制程序,大功告成!! 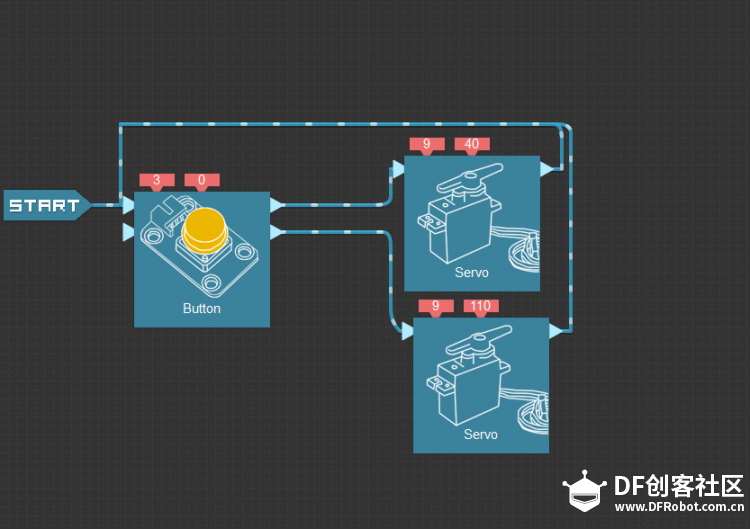  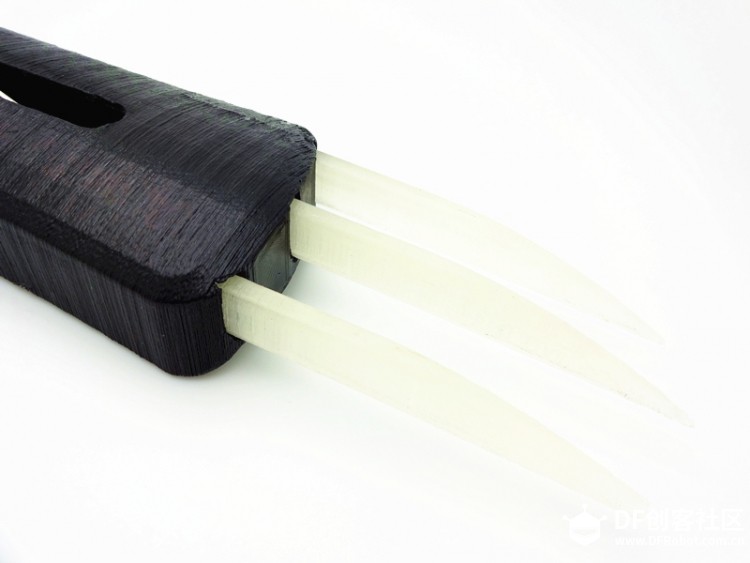 |
 创作达人
创作达人
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶











