|
19457| 10
|
家用型移动机器人制作教程 I2C通讯篇(wire库介绍) |
|
作者:Pepin@DFRobot 转载请注明来源 各位小伙伴们这篇是家用型移动机器人制作教程的第二篇,这套教程的宗旨是通过对GMR通用机器人扩展版的学习,了解如何无线遥控一个家用型移动机器人如何精确定位移动,如何利用数个不同传感器(红外,碰撞,超声波)收集周围环境信息以及如何能够进行简单避障。 家用型移动机器人硬件构架 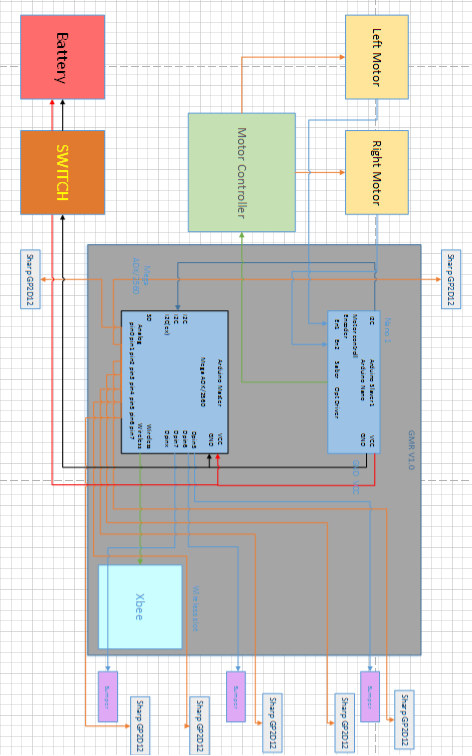 GMR版接口定义 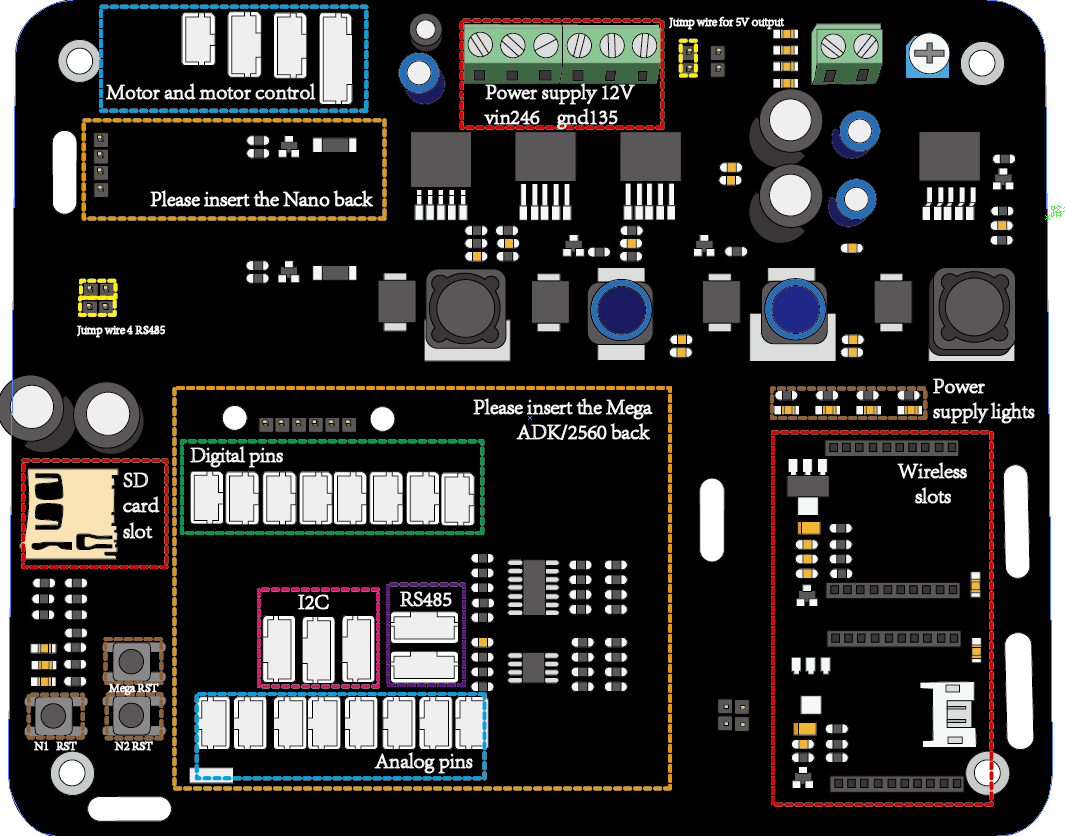 GMR板简介 GMR板全称 通用机器人扩展板, 是一块专为家用机器人平台(HCR) 设计的集成电路板。 在这块集成版上需要插入3 个微处理器(单片机):2块Arduino Nano和1块Arduino Mega ADK。 3块处理器之前均已通过I2C链接勿需另外连线。 其中一块Nano作为电机控制以及数据采集,另一块nano用来驱动超声波传感器。Arduino Mega ADK作为主控板,采集传输数据以及其他扩展模块,另外还有2个无线通讯槽可使用Xbee,蓝牙以及其他通讯模块。另外有8个I/O端口以及8个模拟口3个i2c通讯接口作为Mega ADK 的输入输出。 nano板留有电机驱动的专用端口以及可调旋钮电压输出。 通讯篇 GMR板我们采用了主从结构来进行Nano电机控制板与Mege主控器的通讯,Mega为主机,Nano为从机,使用库wire.h,可以使用wire库中example程序中进行学习。 在GMR扩展版上我们只要插入了mega 和Nano处理器2者之间已经完成了I2C通讯连线。 |
 活跃会员
活跃会员
 宣传大使
宣传大使



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






