|
7223| 0
|
[教你快速搭建【自动导航HCR平台】] 教你快速搭建【自动导航HCR平台】(三) |
系统整体坐标系: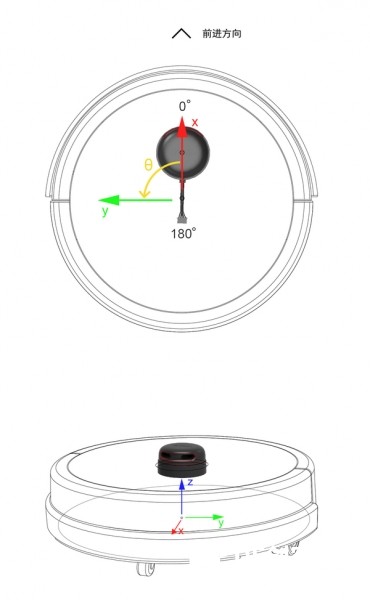 1. 输出底盘调试信息 在配置MCU固件代码的时候,如果需要输出调试信息,可以连接J7调试输出口至电脑USB用SSCOM工具查看调试信息。 请自行下载SSCOM工具,并运行。  比如在底盘代码中加入DBG_OUT(),格式与printf()一致。  然后连接J7和电脑的COM口,用SSCOM工具查看调试信息:  2. 查看底盘状态 (1) 用串口线连接底盘Control Bus串口和电脑COM接口: 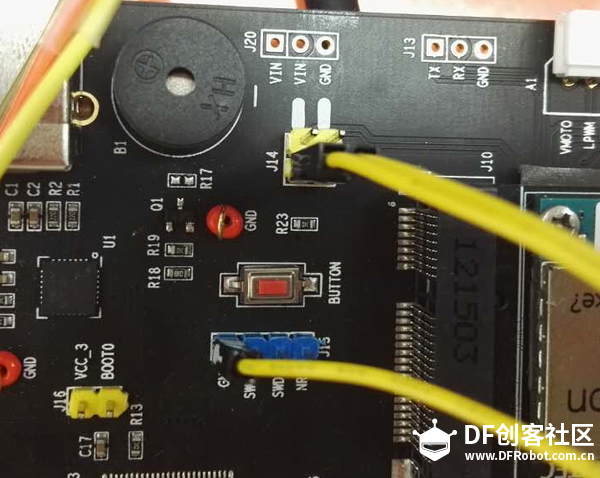 (2) 使用slamware_console.exe测试底盘状态 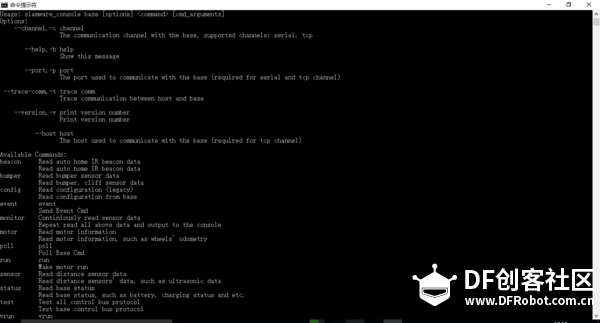 如上图所示,可以用slamware_console工具来测试底盘的配置信息和所有传感器的状态。另外,可以用此工具的run命令(两轮电机可以用此命令,三轮全向轮需用vrun命令,具体步骤请见slamware_console工具操作指南)来测试电机的工作情况 测试电机是否正常运行步骤: 参数说明: Run 左轮速度mm/s 右轮速度mm/s 运行时间s (a) run 50 50 5 把速度设置为50时,电机能正常响应。 (b) run 100 100 5 把速度设置成100时,电机能平稳行驶 (c) 测试里程计是否准确 (1)run 300 300 5 返回值pose(X方向位移, Y方向位移, 偏移角度), 单位是(mm, mm ,degree) X方向正向为机器人前进方向,Y方向正向为机器人左侧, 角度是以X方向为0, 逆时针的方向偏移角度。 比较从初始位置pose(0, 0, 0)到终止位置之间的反馈值与实际测量值之间的误差: 比如下图中: 终止位置为pose(1302.15056, 190.48846, 6.8deg)  (2) run 300 0 5 只让左轮运动(机器人顺时针旋转夹角),并测试差值 (3) run 0 300 5 只让右轮运动(机器人逆时针旋转夹角),并测试差值 误差不能超过5%, 否则会导致机器人导航误差较大且行为异常。 3. 查看系统状态 (1) 用电脑连接上Slamware core的AP  (2) 打开Chrome浏览器(必须使用chrome,否则无法正常显示),输入192.168.11.1 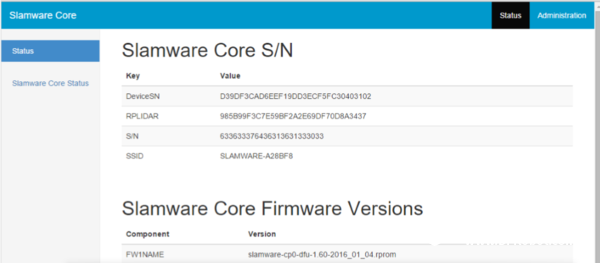 (3)点击右上角Administration后,打开左侧diagnose slamware core, 然后点击enable diagnosis,注意,此时系统会重启。 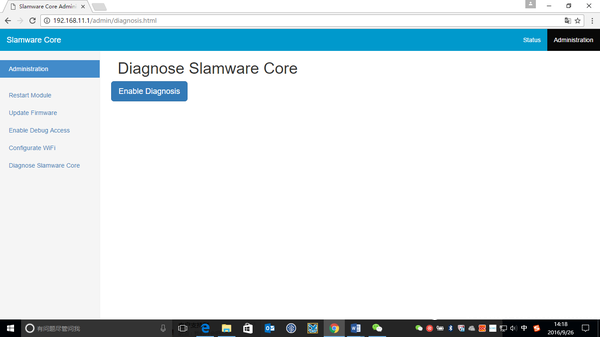 (4)判断雷达是否有噪声,碰撞传感器和超声波传感器和实际情况相比,是否状态一致。 下图中心的蓝色箭头为HCR平台的中心位置,箭头方向为前进方向,周围出现的一圈红点,为雷达探测出的障碍物的位置,箭头周围的黑色小方块,代表cliff传感器,超声波传感器以及碰撞传感器。应该从(a)安装位置是否正确 (b)触发状态是否正常 等两个方面判断sensor是否能正常运行。 4. 使用uicommander控制HCR平台 (1) 使用Slamware windows SDK中bin目录下的uicommander.exe连接HCR平台。下载地址:http://www.slamtec.com/cn/Slamware  (2) 查看能否成功建图: 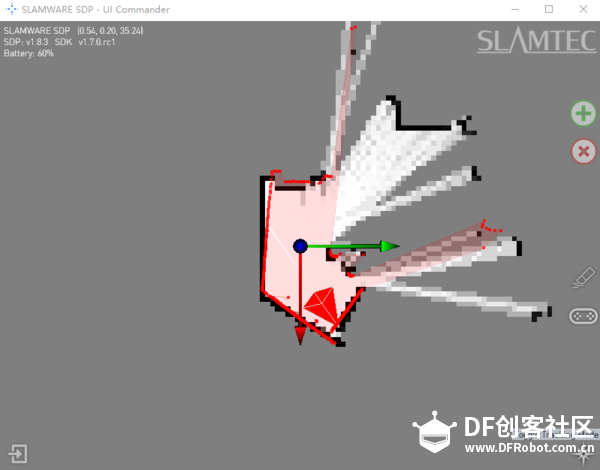 (3) 方向控制: 点击右侧方向控制图标,并点击方向键,查看HCR平台是否能按控制的方向来运动。 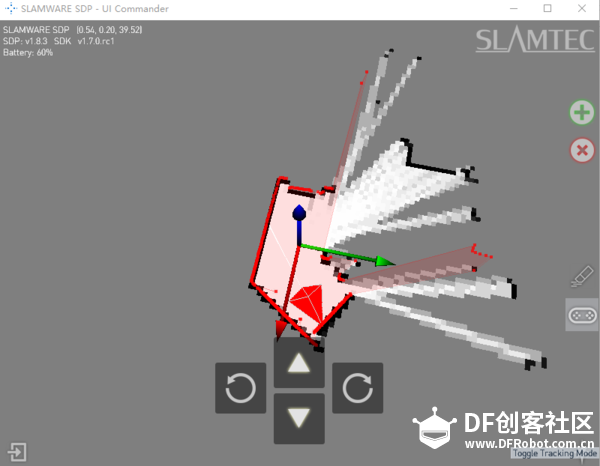 (4) 设置目标点(紫色十字位置),检测HCR小车(红色箭头位置)是否能沿着绿色的规划路径运动至目标点。 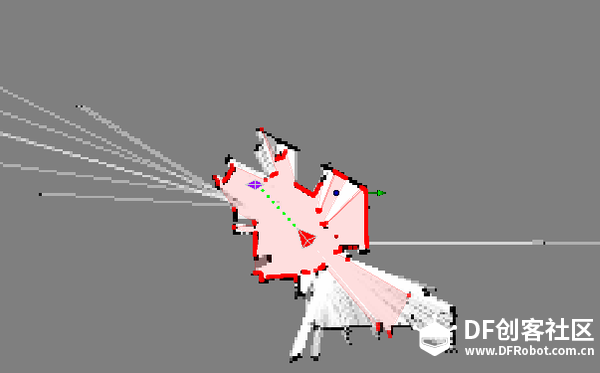 好了,测试完成了…大家可以动手玩起来哦~~ |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






