|
34076| 13
|
[Arduino轻松学] Arduino轻松学Mixly编程第12课招财猫 |
|
Arduino轻松学Lesson 12 招财猫 1.课程简介 动力模块可以为开源硬件增加动态交互效果。舵机是非常常见的动力输出模块,广泛的应用在机器人、机械手臂、航模等领域。本节课将以舵机为例,讲解舵机的原理及控制方法。 本节课所需硬件:Arduino UNO板、IO扩展板、SG90舵机。  2.知识要点 舵机控制 3. 元件介绍 舵机 绝大多数的舵机只能在0°~180°之间旋转。 9g舵机是指舵机可在距转轴中心1cm的地方提供9g的扭力。 舵机是可以精准控制位置的电机,舵机旋转带动内部可调电位器(旋转电阻)变化,根据变化的电阻可以确定目前舵机的角度。 舵机控制使用PWM信号控制,所以舵机要连接到3、5、6、9、10、11几个数字端口上。 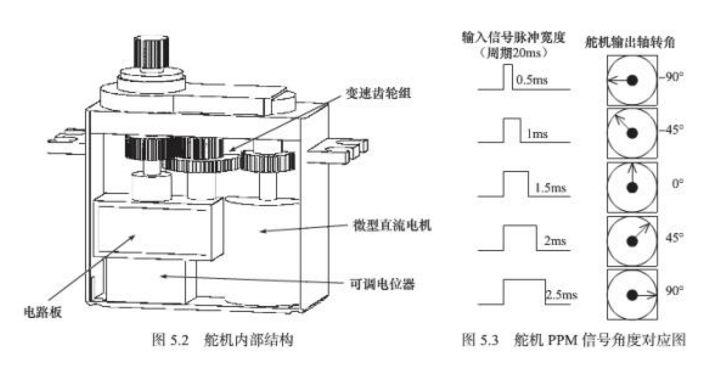 4.Mixly模块介绍 舵机控制 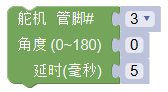 模块位置:“执行器”栏 模块功能:控制舵机旋转至指定角度。 舵机旋转需要一定时间,两次移动之间以及舵机控制与后续语句之间均需要留足舵机动作时间。 5. 程序 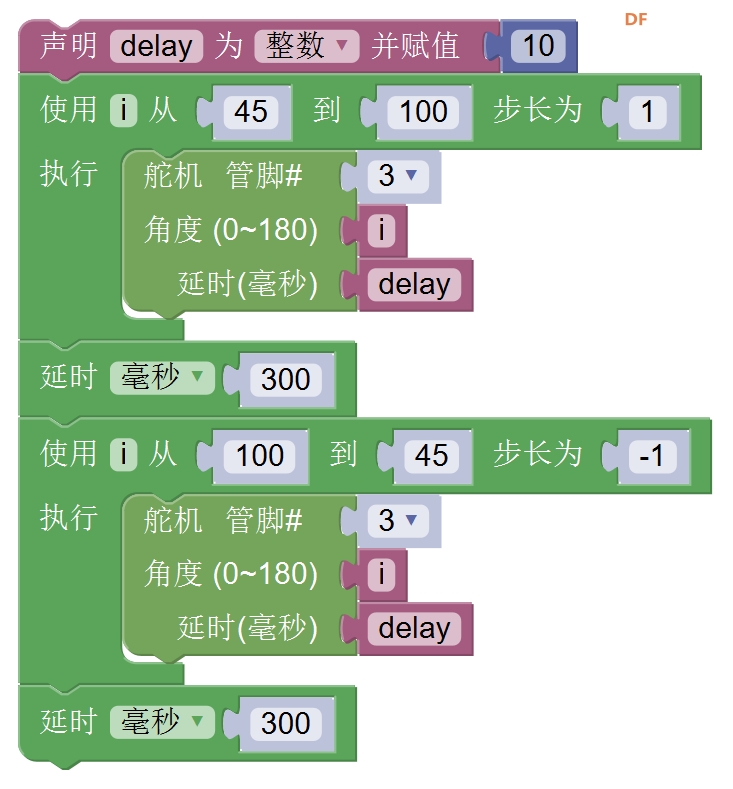 6.课堂练习 1). 下载纸膜,完成课程案例。 2). 完成本节课的程序流程图。 7.作业及挑战 配合角度传感器,制作一个可以调速的招财猫。 课程简介 《Arduino轻松学》是科技学堂制作的在线系列创客教学视频之一。《轻松学》是一套Arduino开发的基础入门课程,适合还没有过硬件开发和编程经验的人群做入门学习使用。本课程中,每节课带你制作一个趣味小项目,在学到技术的同时,也开动想象发挥创造。 课程案例 《轻松学》课程中使用非常适合初学者的DFRobot的米思齐(Mixly)编程积木入门套装,软件选用图形化编程的Mixly。课程以视频+图文的呈现形式,深入浅出。既有操作演示,又方便学习者自主观看查询,轻松完成Arduino的入门学习。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 小蘑菇
小蘑菇
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 ARD DAY
ARD DAY






