这是一个简单的舵机库,通过模拟输出来控制舵机的转动。
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分,总间隔为2ms。以180度角度伺服为例,那么对应的控制关系是这样的:
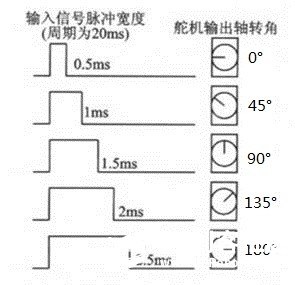
根据信号的脉冲宽度,便可以调节舵机的转动角度。
以下是舵机库的代码:
- from microbit import *
-
- class Servo:
- def __init__(self,pin):
- self.max=self._map(2.4,0,20,0,1024)
- self.min=self._map(0.55,0,20,0,1024)
- self.pin = pin
- self.freq = 50
- self.pin.set_analog_period((int)((1/self.freq)*1000))
- self.angle(0)
- self.lastStat=0
-
- def angle(self,ang):
- if ang > 180:
- ang=180
- elif ang < 0:
- ang=0
-
- self.turn = self._map(ang,0,180,self.min,self.max)
- print(ang)
- self.pin.write_analog((int)(self.turn))
- self.lastStat=ang
-
- def read(self):
- return self.lastStat
-
- def _map(self,x,inMin,inMax,outMin,outMax):
- return (x-inMin)*(outMax-outMin)/(inMax-inMin)+outMin
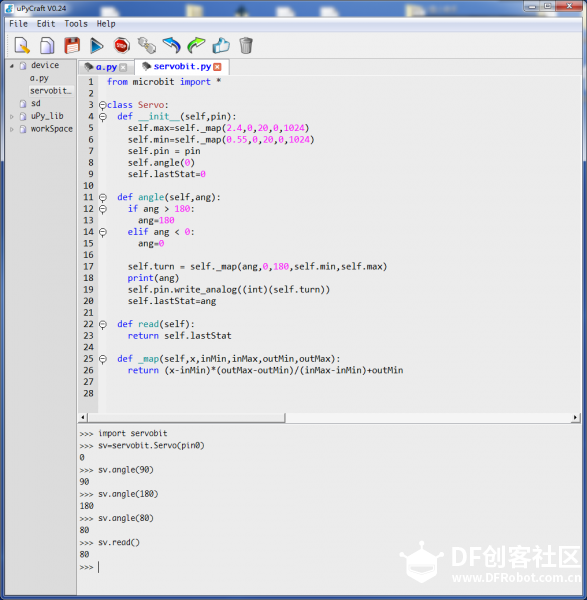
以下是终端输入的控制代码:
- import servobit
- sv=servobit.Servo(pin0)
- sv.angle(90)
执行结果:
注:如果您的microbit带不动舵机的话,可以给舵机外接电源
欢迎大家加入uPyCraft-micropython QQ群:619558168
| 


 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






