|
我不知道风/是在哪一个方向吹-- 我是在梦中,/在梦的轻波里依洄。 我不知道风/是在哪一个方向吹-- 我是在梦中,/她的温存,我的迷醉。 我不知道风/是在哪一个方向吹-- 我是在梦中,/甜美是梦里的光辉。 我不知道风/是在哪一个方向吹-- 我是在梦中,/她的负心,我的伤悲。 我不知道风/是在哪一个方向吹-- 我是在梦中,/在梦的悲哀里心碎! 我不知道风/是在哪一个方向吹-- 我是在梦中,/黯淡是梦里的光辉。
在国庆的假日里,我在写掌控的代码,我不知道会给伙伴们带来多少启发,
或者根本没有。
不过能在掌控的生态建设中发出一点光,
也很开心。
【学习小目标】
练习掌控加速度传感器的使用。
【掌控体感灯】

还没有电池扩展板,自己做了一个接头接上锂电。
视频镇楼:
【过程汇报】
首先认识一下掌控的板载加速度传感器。
【1】显示板载加速度传感器的值
程序:
- from mpython import *
- import time
-
- while True:
- display.fill(0)
- x1 = accelerometer.get_x()
- y1 = accelerometer.get_y()
- z1 = accelerometer.get_z()
- display.DispChar("加速度x:",0,0)
- display.DispChar(str(x1),48,0)
- display.DispChar("加速度y:",0,16)
- display.DispChar(str(y1),48,16)
- display.DispChar("加速度z:",0,32)
- display.DispChar(str(z1),48,32)
- display.show()
- time.sleep_ms(10)
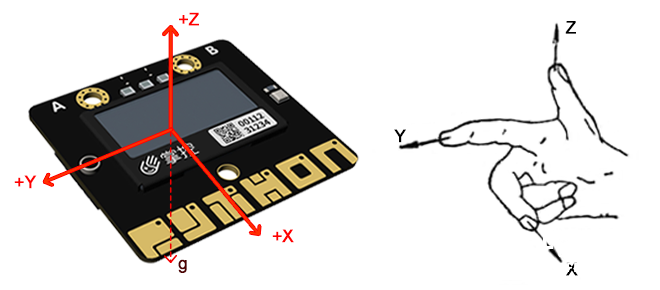
仔(jia)细(de)研究了下,原来掌控的加速度计用的是笛右手坐标系。 【资料】 (传说从高中到大学的课堂上,)教材中所涉及的立体几何基本都是右手系。在原本的二维直角坐标系,再添加一个垂直于 x-轴,y-轴的坐标轴,称为 z-轴,这z-轴与 x-轴,y-轴相互正交于原点。
如下图所示符合右手定则的称之为右手系,反之则为左手系。
右手定则:以右手握住z轴,当右手的四指从正向x轴以π/2角度转向正向y轴时,大拇指的指向就是z轴的正向。
【2】我的掌控体感灯
程序: - from mpython import *
-
-
- while True:
- display.fill(0)
- x1 = accelerometer.get_x()
- y1 = accelerometer.get_y()
- z1 = accelerometer.get_z()
- display.DispChar("加速度x:", 0, 0)
- display.DispChar(str(x1), 48, 0)
- display.DispChar("加速度y:", 0, 16)
- display.DispChar(str(y1), 48, 16)
- display.DispChar("加速度z:", 0, 32)
- display.DispChar(str(z1), 48, 32)
- display.show()
- if x1 > 0.5:
- rgb[0] = (255, 0, 0) # 设置红色
- rgb[1] = (255, 0, 0)
- rgb[2] = (255, 0, 0)
- rgb.write()
- elif x1 < -0.5:
- rgb[0] = (0, 255, 0) # 设置绿色
- rgb[1] = (0, 255, 0)
- rgb[2] = (0, 255, 0)
- rgb.write()
- elif y1 > 0.5:
- rgb[0] = (0, 0, 255) # 设置蓝色
- rgb[1] = (0, 0, 255)
- rgb[2] = (0, 0, 255)
- rgb.write()
- elif y1 < -0.5:
- rgb[0] = (0, 255, 255)
- rgb[1] = (0, 255, 255)
- rgb[2] = (0, 255, 255)
- rgb.write()
- elif z1 > 0.5:
- rgb[0] = (0, 0, 0) #全0,灭灯
- rgb[1] = (0, 0, 0)
- rgb[2] = (0, 0, 0)
- rgb.write()
- elif z1 < -0.5:
- rgb[0] = (255, 255, 0)
- rgb[1] = (255, 255, 0)
- rgb[2] = (255, 255, 0)
- rgb.write()
【扩展任务】
有新函数了。代码可以改短些。
rgb.fill((50, 50, 50)) 点亮
rgb.fill((0, 0, 0)) 灭灯

|
 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









