|
9577| 4
|
[建造日志] 天津大学第十五届机器人大赛 Team Longbility建造日志 |

|
萌新第一次发帖,还望各位大佬多多指教。 大家好,这里是冰清,是天津大学2017级微电子专业的学生。在前不久结束的天津大学第十五届机器人大赛中,我作为team longbility的队长带领团队取得了冠军。在本帖中,我将总结自己的造机历程并复盘最近的这些比赛。 设计 2017年的校机器人大赛是常规的智能车类型,由于自己编程实力不强加之信息获取渠道过于狭窄,等到知道比赛的存在的时候我就已经坐在决赛的观众席上了(笑)。2018年的比赛改为格斗机器人类型,稍微对这方面有一点粗浅了解的我就拉上舍友组队报了名。由于一开始具体规则还没有发布,团队的设计方向是模块化的偏置横转机器人。 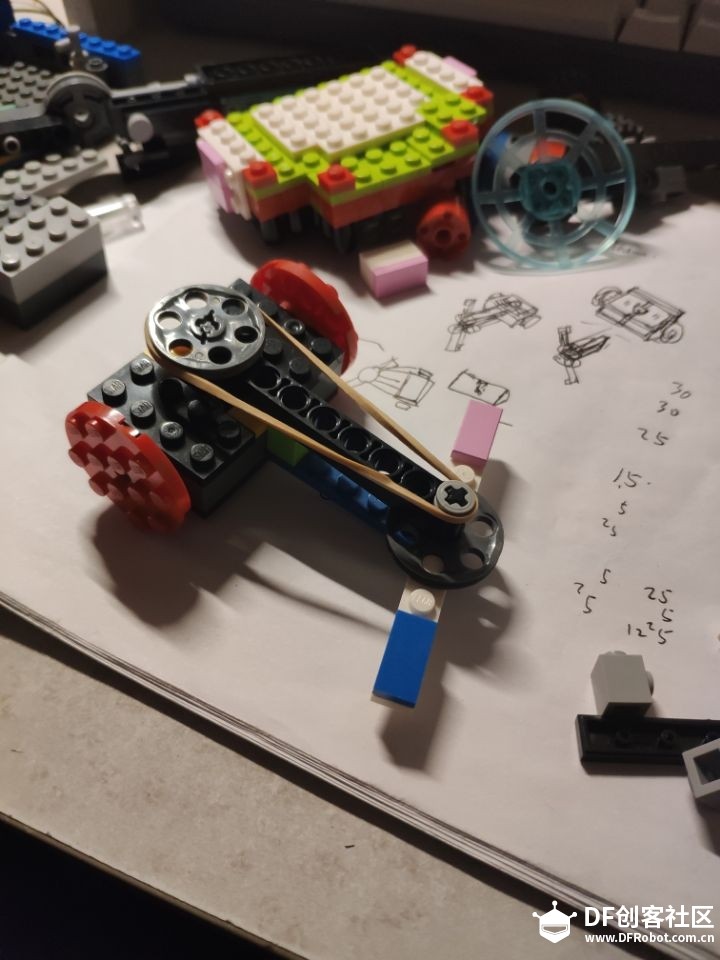 先用乐高拼个大概的样子 然后就在大概的设计路线确定好之后,具体规则发布了,由于资金和场地原因,各队伍禁止使用旋转武器。旋转类武器的路子走不通,我们便开始想其他路线。其中一种方案是类似yeti去掉转鼓之后的叉车举升方案,但最后还是选择了弹射系。 确定了武器类型,接下来就是进行车辆整体框架的绘制。在听取了某位不知名群友的建议后,我准备使用7075铝合金cnc全车外壳并用m4螺丝拼装。画图软件一开始选择了cad,但由于cad的3d建模不太方便就改用sw。微电子学院没有sw相关的课程,基本操作全靠百度自学,导致一开始进度缓慢。熟悉操作后,进度就快了很多。为方便计算,我直接选用了10mm厚的铝板进行加工,又由于重量限制在5.5kg,势必要对外壳进行挖坑减重处理。在侧板,底板和前铲上,我都做了挖坑处理,好处就是车壳重量可以控制在一个不错的水平,坏处就是加工成本的上升。然而进行了大量的挖孔操作后,车壳重量依旧超出预期,于是就用透明pc耐力板弯折代替铝合金cnc制造后盖板,重量降低的同时成本也控制得很好,另外能直接看到车内部结构的“透明探索版”也是我很喜欢的。在这里要再提一遍,由于赛制不允许旋转武器,因此pc耐力板的强度是完全够用的。如果放开旋转武器的限制,后盖板就会采用别的方法和材料制造。 加工之后拼一下外壳 电路与机械结构 弹射机制的选择上,使用压缩空气或者二氧化碳的气动弹射方案是首先被想到的,但是规则中为确保人员安全禁止使用气动弹射机构,于是就想使用弹簧作为弹射动力。如何复位弹射板是最需要被考虑的问题。自己想了几种方案都不可行,于是就去机器人大擂台吧询问吧友。在此特别感谢百度贴吧@巴斯sky提供的lockjaw弹射结构图,确定了使用凸轮复位的方案。 在零件加工过程中,我们进行了车内电路系统的调试。 一开始的计划是依照13.6kg级别(?)机器人建造方案采用武器电机和行走电机的电池分开的设计,就计划武器使用格氏4s 2200mah锂电,行走使用4s 2600mah锂电。电机的选择上,行走电机依照力大砖飞的思想(笑)选用了12v 600转的775减速电机,武器电机由于考虑到车辆内部空间以及重量选用了27转的555电机。电线就使用了论坛教程中推荐的12awg硅胶线,柔软耐用,就是线径稍粗,不方便焊接。车轮选用了8cm直径的铝合金硅胶计米轮,其实最好的选择是像论坛大神们那样自己制作硅胶轮,但是手头没有3D打印设备,学校方面我也没去询问相关支持,就放弃了这个想法。 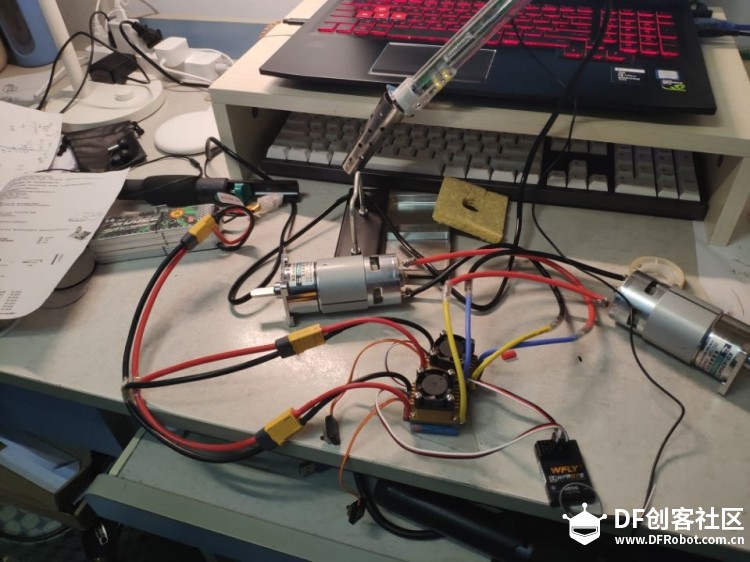 桌面上的凌乱走线测试 控制方面选择了便宜大碗的天地飞7遥控器。因为没有接触过航模类遥控,我就直接选择了双摇杆自动回中类型(听说能自己改装成日本手或者美国手),通道数也完全够用。事实上这辆车只占用了3个通道,接收机还是绰绰有余的。电调为方便直接选择了淘宝爆款450a有刷电调。遥控器对两个通道的电调进行差速混控设置,进行到这里都没什么问题。 车壳加工完成,开始组装。组装过程很顺利,不装武器系统的情况下小车顺利地跑了起来,之前担心的计米轮摩擦力不够的问题也不用再担心了。 之后就是对弹射武器系统进行调试。一开始担心的弹簧力度太大的问题没有出现,弹射板的复位也能良好进行,只是复位后前铲不能实现完全贴地。不过,在进行例行测试时,武器电机出现了打齿的问题,这使得弹射板的复位无法正常进行。在更换了损坏的减速箱齿轮后,打齿问题又再度出现,这使得我不得不放弃弹射武器的方案。 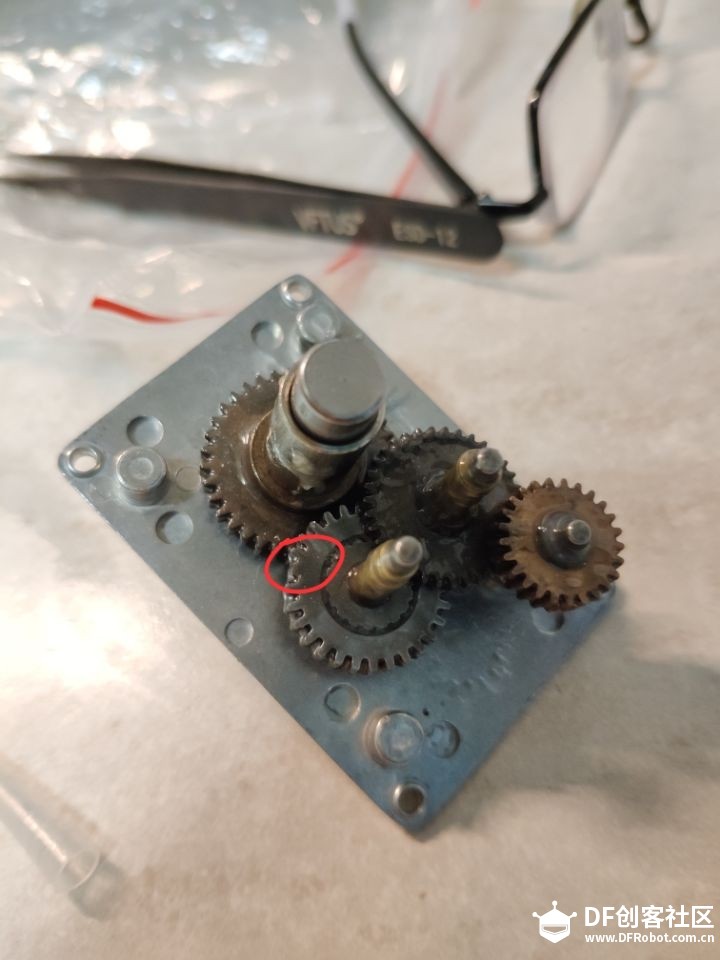 损坏的减速箱内部 注意红圈圈出来的打齿部位 放弃弹射武器的方案之后,剩下的方案只剩下举升。动力源使用电动推杆是最无脑方便的,但是车身内部已经塞不下市售大小的电动推杆。这时我想到了步进电机常用的丝杆,用联轴器连接电机和丝杆,丝杆上装载滑块,用钢丝拉拽举升板。字面上的方案是可行的,就进行了材料的购买。这次的电机依旧使用了555减速电机,转速提高到300转以提高举升速度。底板是依照上一个减速电机设计的,孔位略微有所出入,我就使用扎带和螺丝的方式进行固定,效果不错。丝杆使用了3d打印机用100mm长的t8丝杆。货到之后进行装配,达到了想要的效果。  复赛中维修过程拍的内部结构 比赛之前的称重环节,稍微超出重量400g,但还是处在可进行比赛的范围之内。为尽可能减重,全车的行走系统和武器系统共用一块2200mah电池,电路也进行了重新焊接。 比赛过程盘点 初赛第一场,对手是采用四个履带行走的机器人,武器是电磁铁矛。由于不熟悉场地,我在车前方加了两个乐高零件当作辅助轮,这样的好处是可以大大降低摩擦,坏处就是车头不再贴地。比赛过程中,前半段打得还不错,但由于螺丝不够紧固,乐高零件和螺丝一同掉落,这就使得后半段操控异常困难,这也直接导致了第一场的失败。 初赛第二场,对手是小号的四轮大脚车,武器是细电钻。这次我将两个乐高零件拆掉,车成功地发挥了贴地的优势,并顺利将对手ko。 初赛第三场,对手是轮式方盒子车,武器是小砍刀(这辆车日后被我们称为“摸头杀”)。分析了之前他们的比赛,他们的车行动能力远在我们之下,操控系统也有问题,甚至在和我们比赛前还在不断调试。这次我先发制人,直接ko对手。 两胜一负晋级复赛。 复赛第一场,对手是来自机械学院的举升叉车,这辆车也是这次大赛中我最喜欢的车。由于初赛中他们的移动速度太慢,我就建议他们最好更换电机。结果他们换完电机就要跟我们打(悲)。比赛过程极度精彩,话不多说看视频即可,以至于打完我和对方一致认为这场比赛应该是决赛才有的水平。 裁判判决是我们赢了,也是有惊无险。 视频p1 p2复赛第二场,对手应该是一辆凿击型的锤子车,但是这辆车在上一场比赛中受损严重,以至于本场比赛直接弃权,我们不战而胜。  预定参赛的应该是这辆 复赛第三场,对手是导致上面那辆车弃权的罪魁祸首(笑),同样是一辆凿击型的车。这次我们在较易受损的pc板上装上了泡沫和气泡垫保护,起到了不错的效果。比赛打满了三分钟,最后裁判判决我们队胜出。  比赛前夜准备的防锤子套件 复赛第四场,对手是斜对门宿舍的队伍,队长是同班同学。他们的车由于机动性不强和举升铲的设计缺陷,被我们击败了。 复赛结束,我们队以小组第二的积分晋级决赛。 决赛之前的调试,我注意到由于场地摩擦力较大,硅胶计米轮损耗较为严重,所以又重新购买了橡胶车轮。在车尾部我用市售的塑料板尺将离地间隙遮挡住。 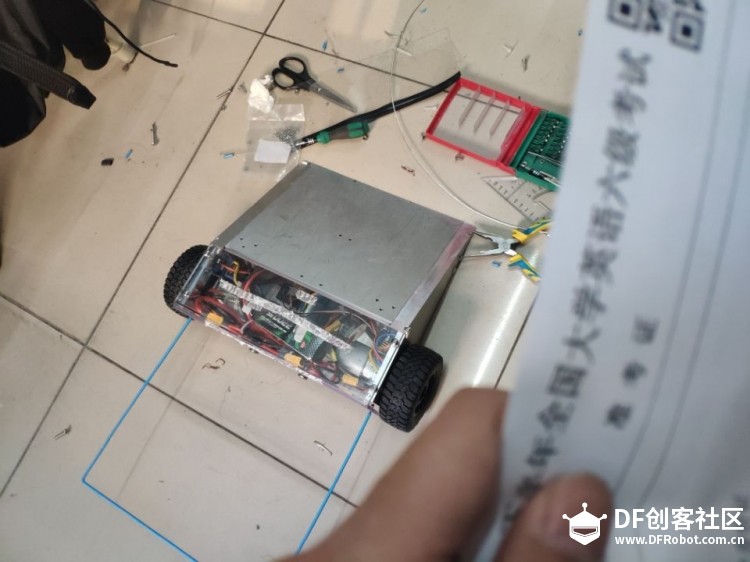 考什么六级 有比赛重要吗(不) 半决赛抽签,又和机械学院的车碰面了。比赛过程中,塑料板尺表现出了相当好的效果。但是新车轮的联轴器出现了问题,导致比赛最后20秒一侧车轮失去动力。打满三分钟,裁判判决我们胜出,于是晋级决赛。 决赛的对手同样来自我们学院,于是冠亚军争夺战成为了院内对抗(笑)。我方在灵活性上占优,但是在比赛最后联轴器再度出现问题,这次直接导致一侧车轮脱落。裁判裁决,我们以1分小分的微弱优势获胜。 比赛直播录像 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








