|
27337| 24
|
[入门教程] Micro:bit 28 体感遥控小车 |
|
漂流的时候,几个月前了,胡老师就用小micro:bit造出来了一辆寻迹小车。那个佩服啊。 心中就有一个愿望,也要造出一辆来。 国庆节来,刻苦钻研。反正常常下雨,学习正好。 当党的光辉驱散乌云的时候。小车造出来了。 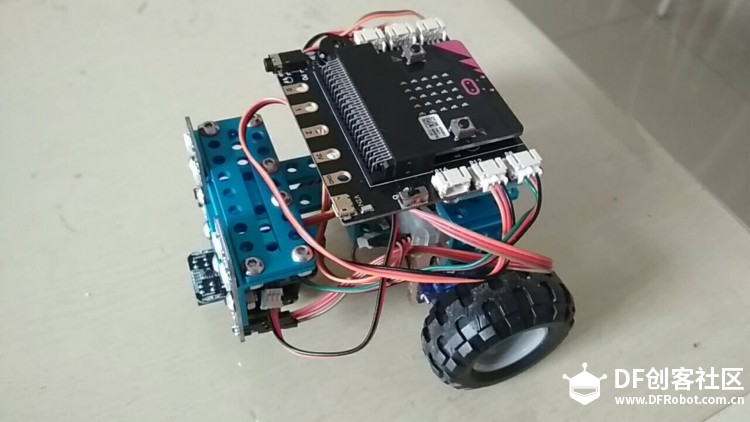 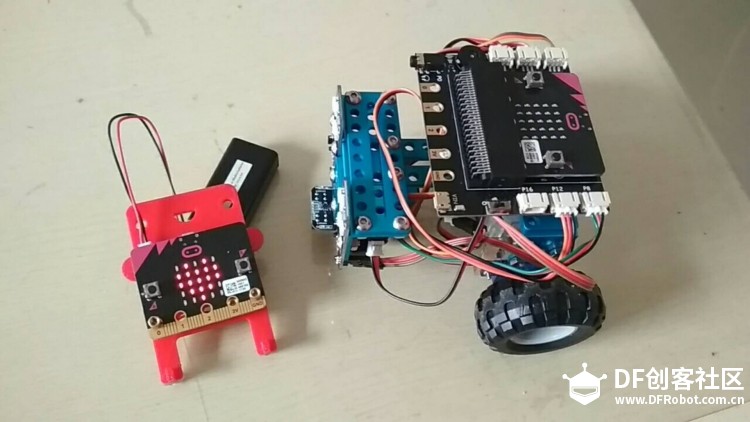 小齿轮Micro:bit小车1.0,有点丑。 材料准备: Micro:bit板X2, df扩展板X1, 9g360度舵机X2。 其它的都是用手上有的材料,mk搭的车身,乐高轮子想办法和舵机盘组合起来,mbot万向轮,mk四rgb灯2。这个有啥用啥了。 造车在上班之余用了几天,编程没弄太复杂,倒快。 程序截图,仅供参考。 编程平台用的向金老师的网站,我惊喜的发现更多的模块汉化了,向老师的团队又做出了新贡献。 制作中多次和胡老师交流,一并谢过。 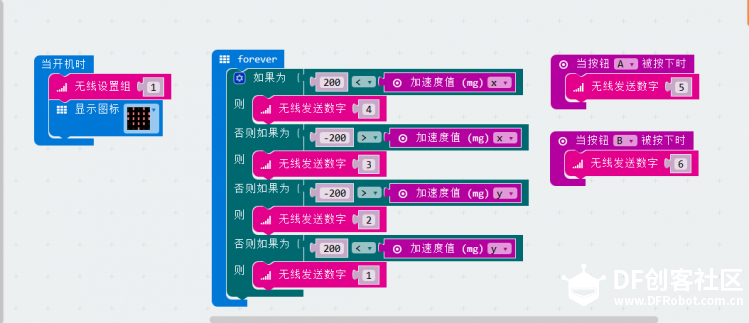 关于舵机设置。 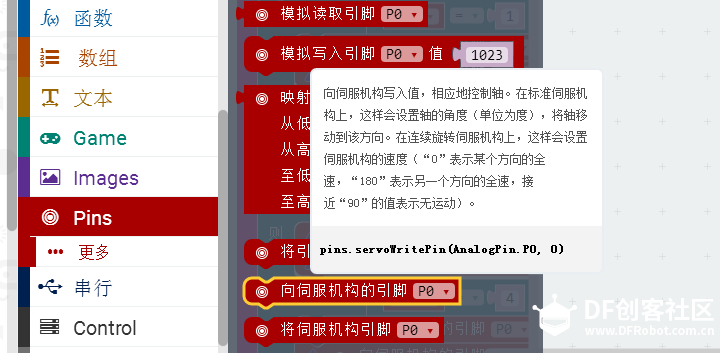 关于加速度。 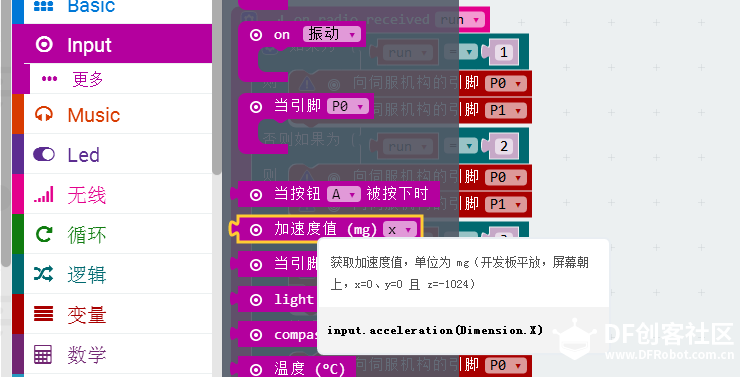 加速度传感器测试时可以用吕老师教的方法测试。可以更好确定传感器的值,我这里选了+-200,是为了更灵敏。 https://mc.dfrobot.com.cn/thread-28222-1-2.html |
| 楼主 单独把舵机连到板子上测试的时候都是正常的 但是把两个舵机同时连接到板子上时就都不能运作了 楼主有没有遇到这样的问题 有没有什么好的建议 谢谢啦 |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶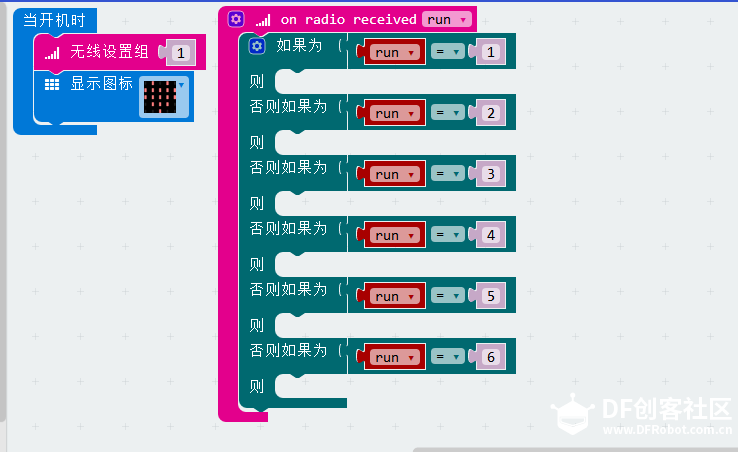 汉化翻译正在进行中,小车接收端程序显示乱了,干脆空出来,高手的你,自己完成吧。
汉化翻译正在进行中,小车接收端程序显示乱了,干脆空出来,高手的你,自己完成吧。


 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









