|
4016| 1
|
[入门教程] 小MU|麦小昆晨练----跑圈圈啰 |
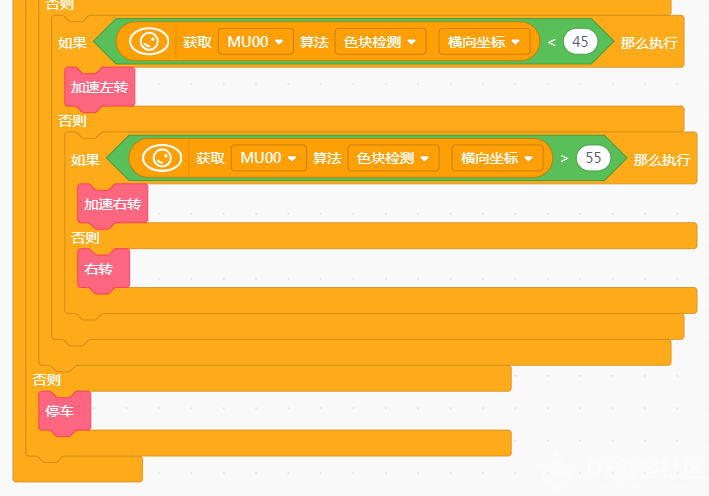
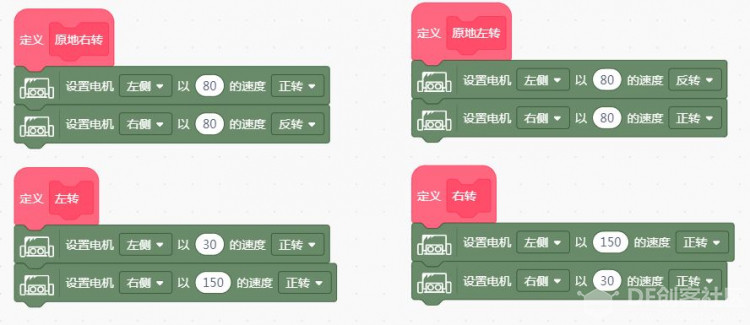
本帖最后由 rzyzzxw 于 2019-10-24 11:18 编辑  嗨,大家好,我就是人见人爱,花见花开,学习好,身体棒的麦小昆。 我更是新时代的麦小昆,添加了小MU做装备,更具有了超人的能量。 https://www.dfrobot.com.cn/goods-1802.html  今天天气真不错,早早起床锻炼身体啰。 一起操场上跑圈圈啊。 器材准备: 人见人爱小麦昆 1https://www.dfrobot.com.cn/goods-1802.html 神奇慧眼小MU 1https://www.dfrobot.com.cn/goods-2003.html MU支架 1  MU折叠支架.zip MU折叠支架.zip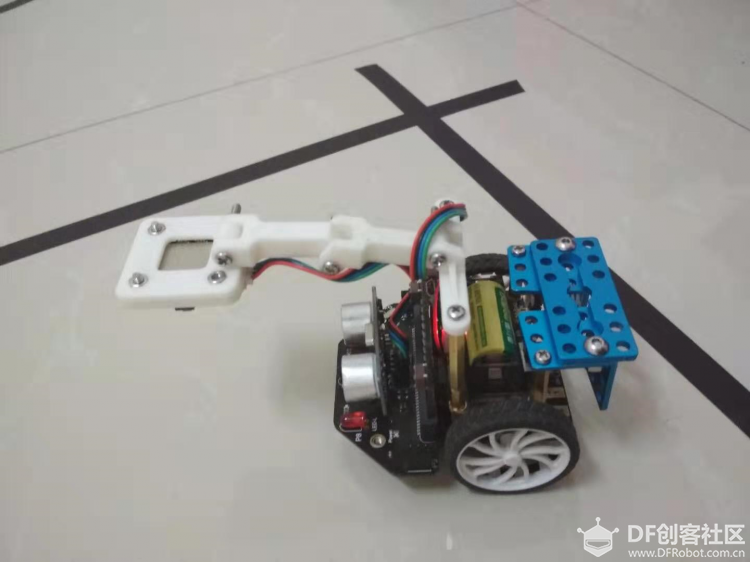 一、组装与连接 小麦昆和小MU通过4pin PH2.0—杜邦线进行连接,虽然官方给出了IIC和UART两种接口,习惯性选择更灵活好用的IIC方式,同时小麦昆超声波后面也经集成了 IIC接口,貌似是“姻缘巧合”。 注意:选择IIC模式,需要将左侧的模式拨码开关1拨到下面,开关2拨在上面。 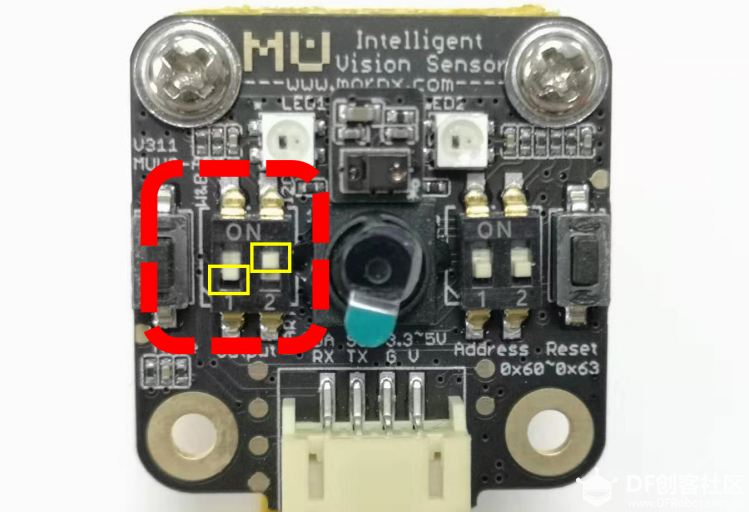 二、编程准备 研读小MU开发文档【小提示:开机时对白色路面进行白平衡锁定,要耐心调整高度和角度,实现正确的小MU视角】       就这样吧。休息一下。 我要努力做新时代好少年。 更新: makecode程序 https://makecode.microbit.org/_DEFTrC8er2Va 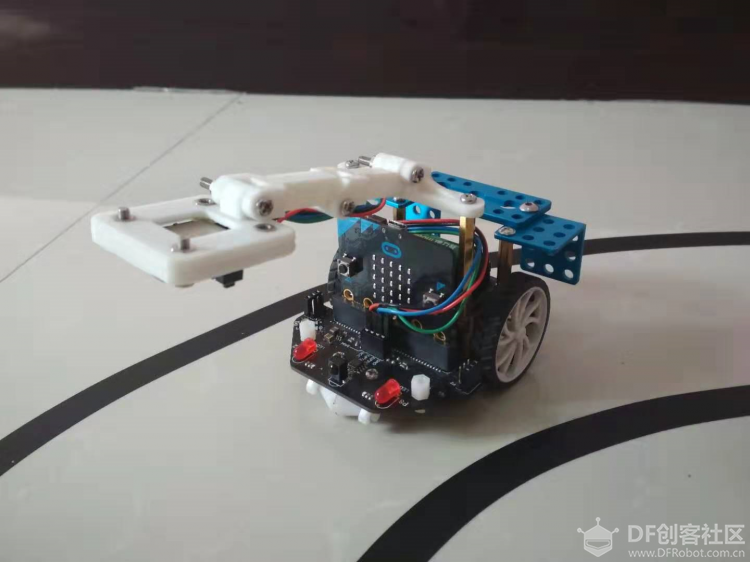 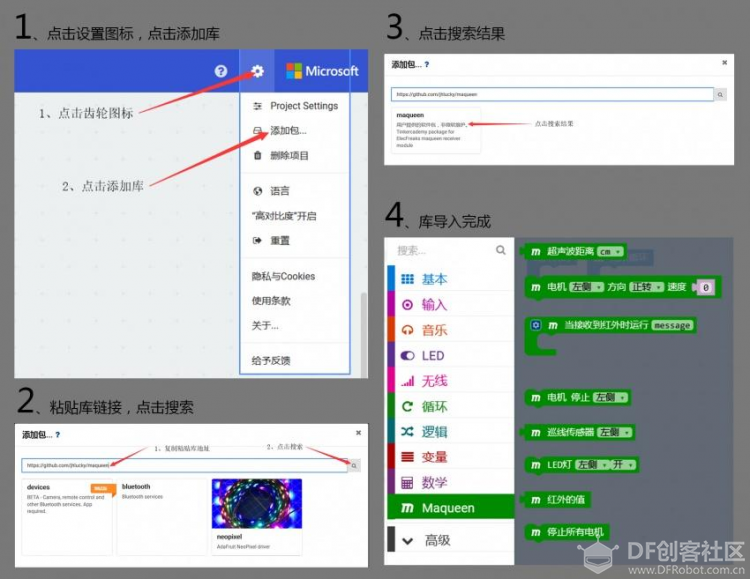 3、开机初始化配置小MU 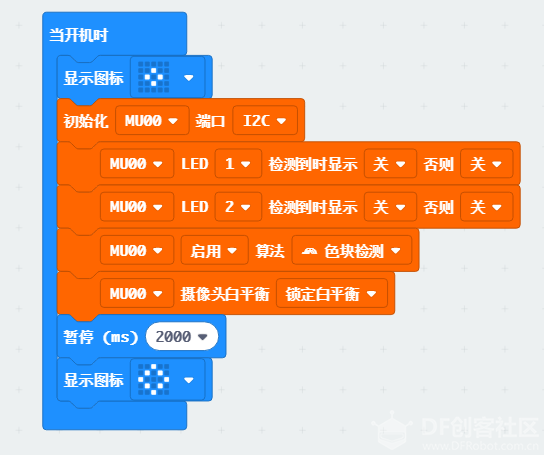 4、定义小车运动函数 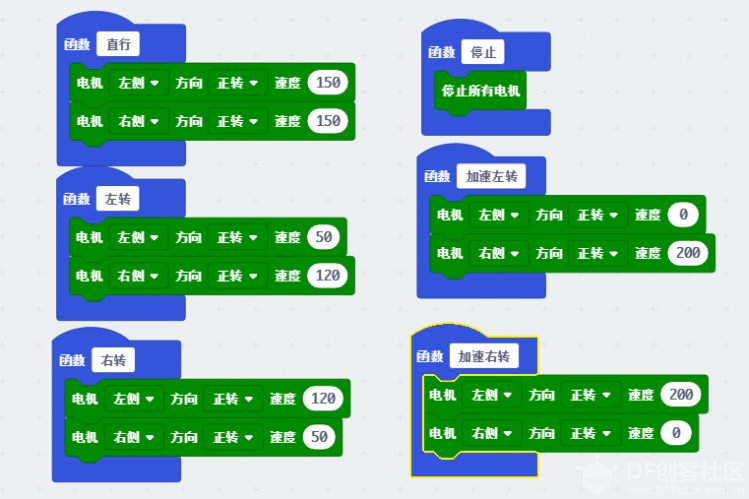 5、耐心调整小MU视角【小提示:开机时对路面进行白平衡锁定,要耐心调整高度和角度,实现正确的小MU视角,根据路线宽度,耐心调节MU的角度与高度,对路面白平衡很重要。环境光照要比较均匀。】    |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed




 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









