|
15669| 3
|
[项目] 掌控板2.0版制作指南针探索 |
|
拿到2.0版的掌控板后,首先想到的就是新版的掌控板增加了哪些新功能,得知2.0版掌控板增加了磁场传感器,第一个想法就是利用掌控板做一个指南针,但是一直忙于年底收尾工作,没有顾得上写,直到朱老师发出帖子(https://mc.dfrobot.com.cn/thread-300344-1-1.html)后才发现,朱老师已经做了这方面的测试,谢谢朱老师的分享! 我又在朱老师的基础上做了一个小变化,帖子中是用一条直线来指示方向的,我用两个三角形拼成了一个指南针的图形,算是对学习了朱老师帖子后的课后作业题吧。 先说一下我的思路,分别用一个空心三角形和实心三角形拼成指南针,指南针的形状实际上就是一个菱形,四个点坐标确定两个三角形三顶点的坐标,菱形的对角线AC与正北的夹角a就是mpythonX中指南针的方向,AC长度60像素,BD长度16像素,利用三角函数分别计算A、B的坐标Ax、Ay,Bx、By,C、D点关于A、B点中心对称,将坐标值对应取反即可。 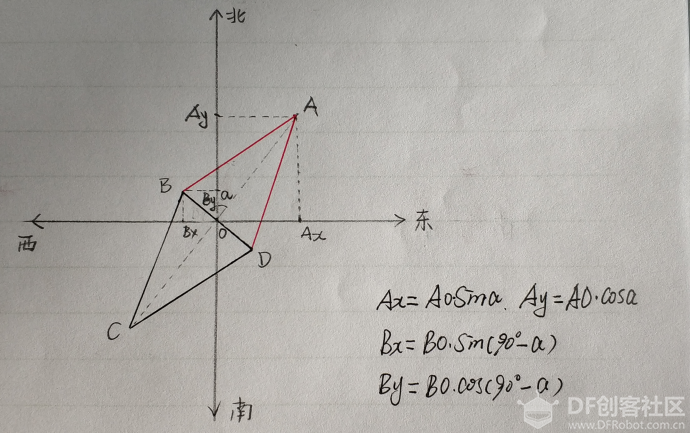 代码如下: 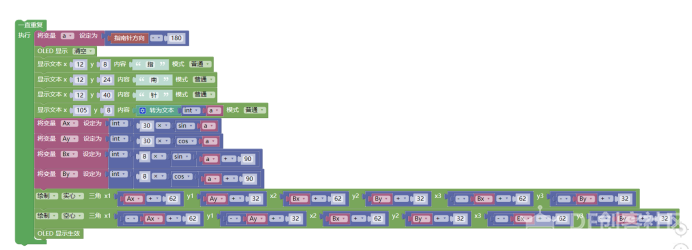 实际效果: 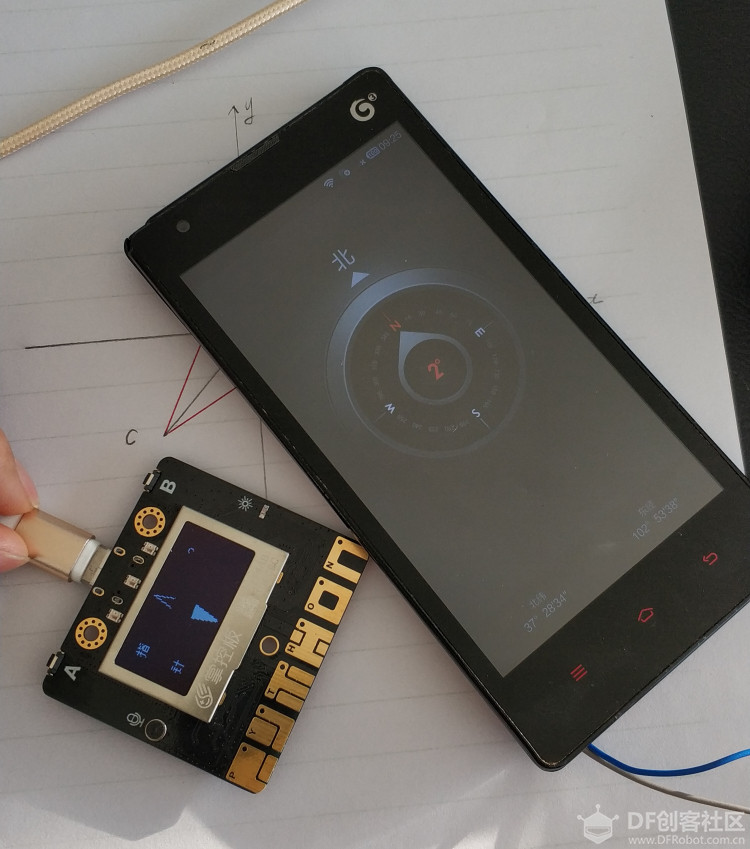 视频: 刷入代码收实际测试发现,能够大致上指示南北方向,但是跟手机自带指南针相比,有较大的偏差,经过跟盛思唐工咨询,是因为磁场传感器容易受到所处环境的其他磁场、磁性物体的影响,手机中指南针有校准功能,而掌控板这个目前还无法校准,期待后续提供校准功能。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶