|
9979| 3
|
[项目] 【mPythonX】mPythonX千里马智能机器人——微信控制 |

上一篇:mPythonX千里马智能机器人——无线控制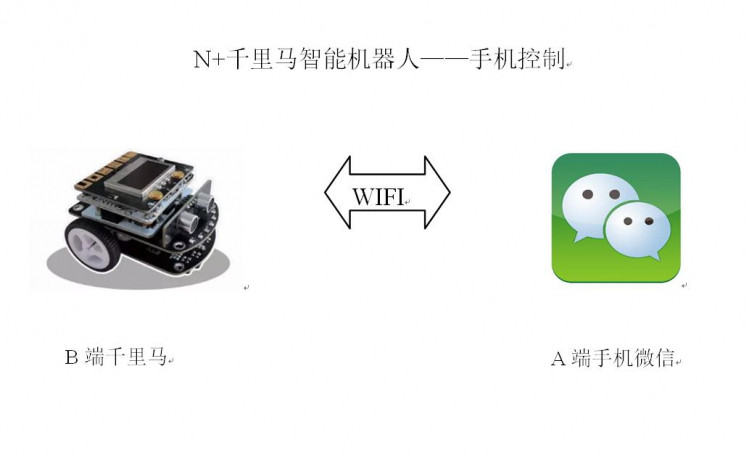 一、思路: 利用掌控板物联网小程序,通过A端手机控制B端千里马运行状态, 1.当按下A端手机微信中前进按钮,发送命令:前进, B端千里马前进; 2.当按下A端手机微信中后退按钮,发送命令:后退, B端千里马后退; 3.当按下A端手机微信中左转按钮,发送命令:左转,B端千里马左转; 4.当按下A端手机微信中右转按钮,发送命令:右转,B端千里马右转; 5.当按下A端手机微信中停止按钮,发送命令:停止, B端千里马停止; 6.通过B端千里马光线传感器检测环境光线,通过网络在A端A端手机微信中实时显示 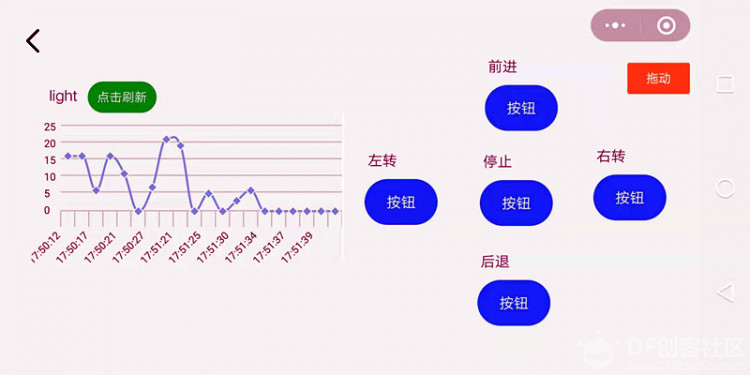 二、环境: 1.软件:mPythonX0.5.1 2、硬件: (1).千里马 (2).掌控板 (3).百灵鸽 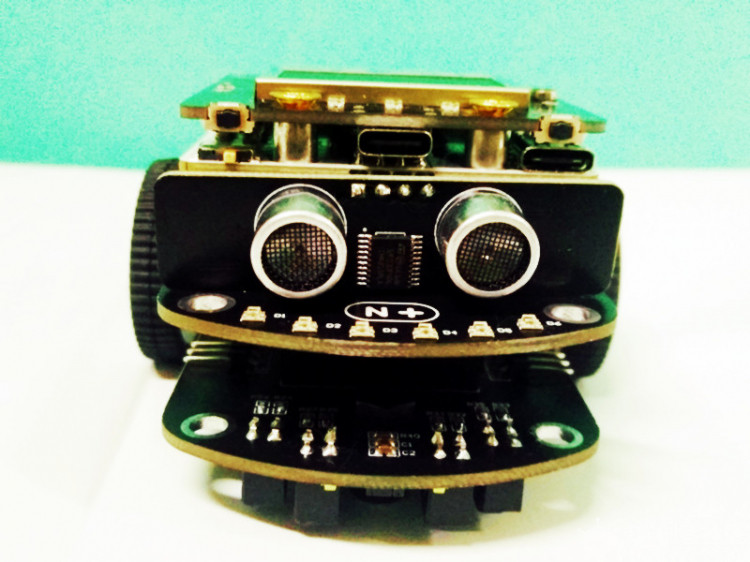 四、准备工作——设置A端掌控板 1.打开 A端手机微信程序,在 查找选项中输入:掌控板物联网小程序,微信一键登录;  2.允许微信账号和密码登录,记住手机号和密码,编写程序用到;  3.进入“我的掌控板”,右上角添加掌控板,名称:自定义,地址:掌控板正面12位编号 ; 掌控板添加后,牢记设备ID:583178008 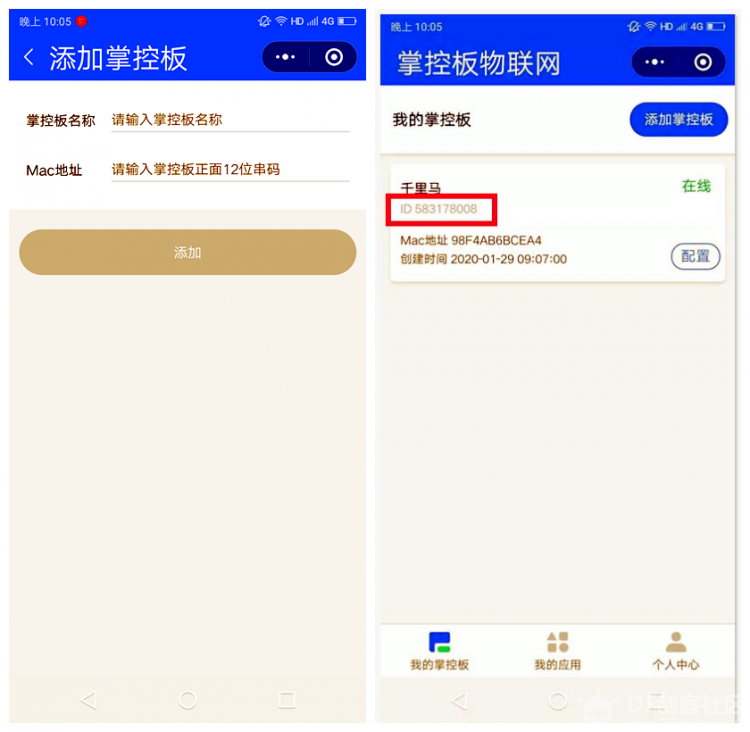 4.进入“我的应用”,右上角添加添加应用,car,添加按钮和折线图 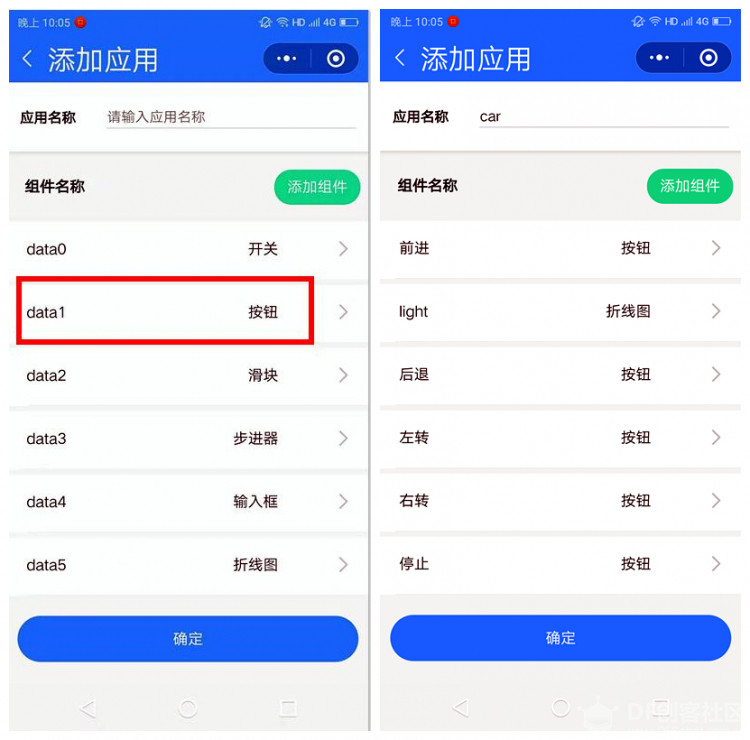 5.进入“个人中心”,记住产品ID221628  五、编写程序——B端掌控板 1.打开mPythonX0.5.1,串口连接掌控板, 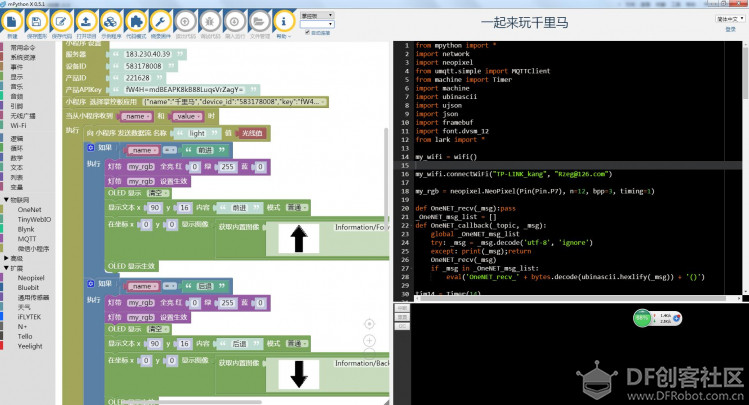 2.窗口右上角,点击登陆账号密码与微信账号密码相同。  3.窗口左侧,Wi-Fi块添加网络,账号密码 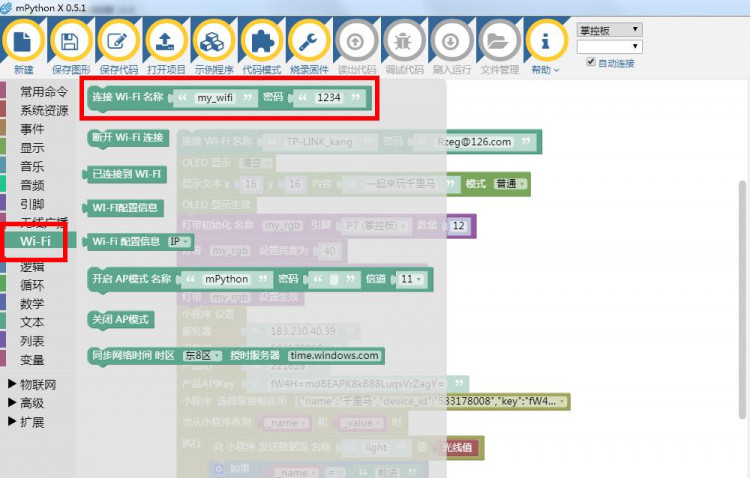 4.窗口左侧,扩展块添加RGB, 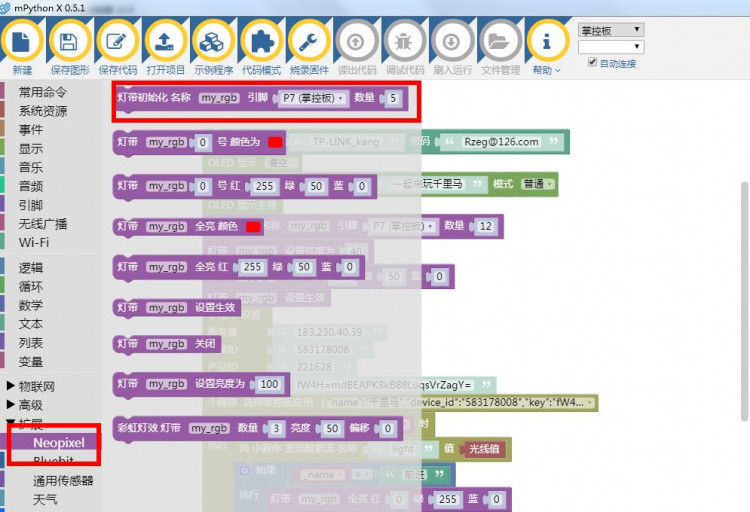 5.窗口左侧,物联块添加微信小程序, 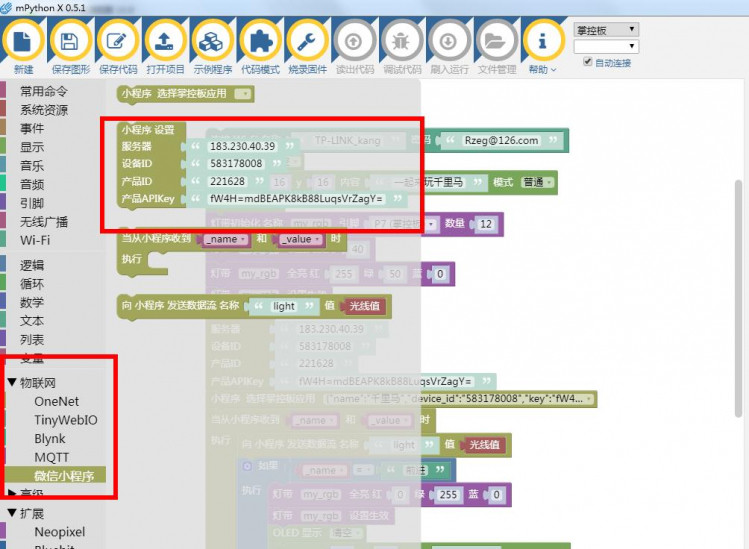 6.窗口左侧,显示块添加千里马运行方向 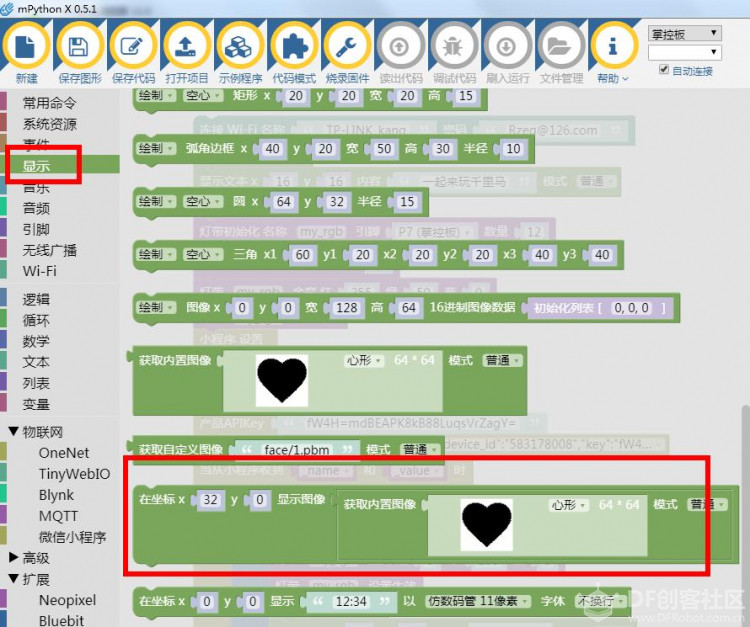 7.连接网络,初始相关参数,微信服务器:183.230.40.39不变, 设备ID 与微信设备ID一致,产品ID和微信ID一致,API自动生成。 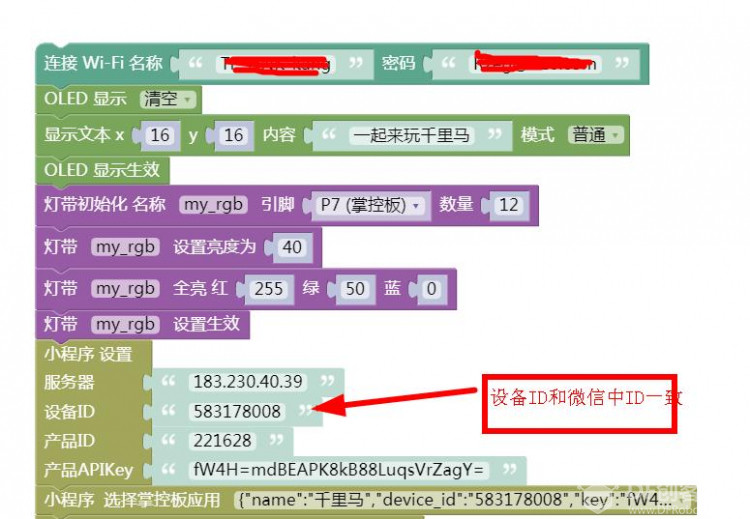 8.主程序,当收到A端微信发出的信息,控制千里马运行状态。B端光线传感器,在A端微信物联网显示出来。 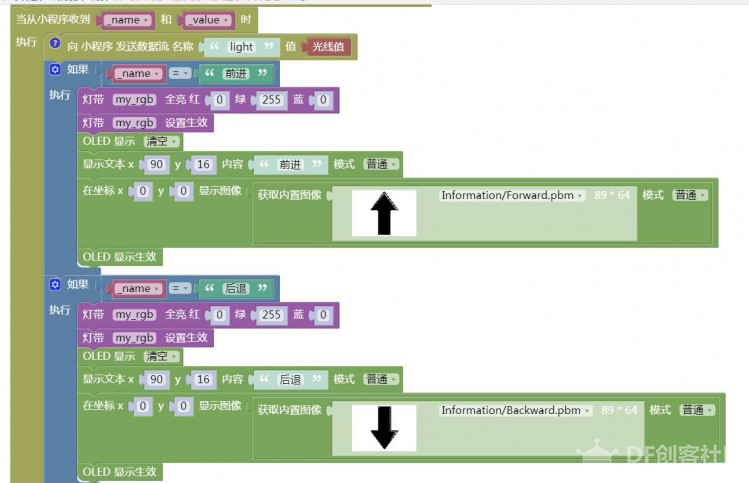 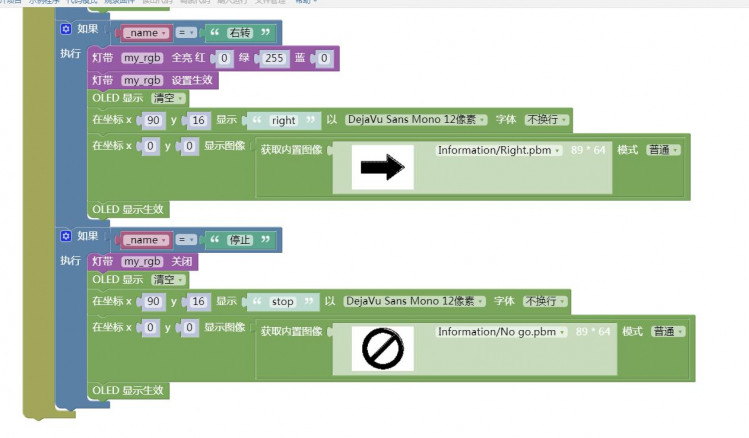 六、视频回放 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶 连教程都写那么好!
连教程都写那么好!
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






