|
2773| 2
|
【临沂】【杭州古德微机器人】树莓派—警示灯学习记录 |
|
本节有两个程序,主要是运用全局变量和局部变量,使用循环嵌套,设计程序,控制三个灯的交替变化和交替速度的变化。 使用的硬件有:树莓派扩展板、led灯三盏,杜邦线。  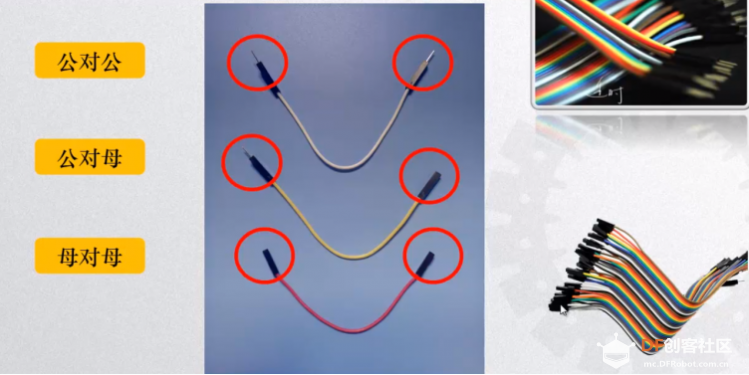 第一个程序: 先连接硬件。三个小灯负极链接到三根公对母杜邦线,三根杜邦线的负极插入扩展板的GND上,三个小灯正极通过杜邦线连接到23、24、25号引脚上。使用母对母杜邦线连接23号引脚和其中一盏小灯。使用另外两根公对母杜邦线连接24、25号引脚和另外两盏小灯。 这个地方,初学者容易出现错误的是,由于对引脚的作用和相应接口不明白,连接vcc、d还是gnd,影响运行结果。 我第一次照葫芦画瓢接好后,总是有一个灯不亮,24号引脚接的小灯一直不亮。在群上咨询了大家,得知这种接法可是会出大问题。暂停,补课,是此时做好的选择! 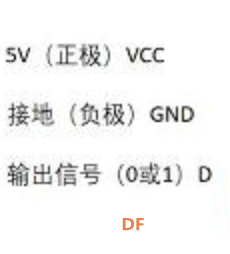 Vcc 和 GND 分别是供电接口: Vcc 是电源正极, GND 是公共接地端、电源负极。负极接GND,正极接数字接口D。 我的24号正极接错了。赶紧改错,但是灯仍然不亮。 这个时候就要考虑杜邦线和灯的问题了。杜邦线的问题排除,为了测试灯有没有坏,我把杜邦线撤掉,三个小灯连接了6、12、16号引脚。程序上改变了for后面的范围为6到16。 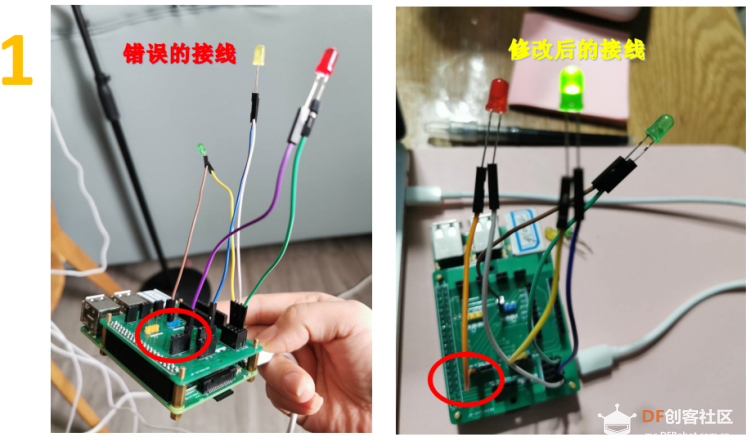 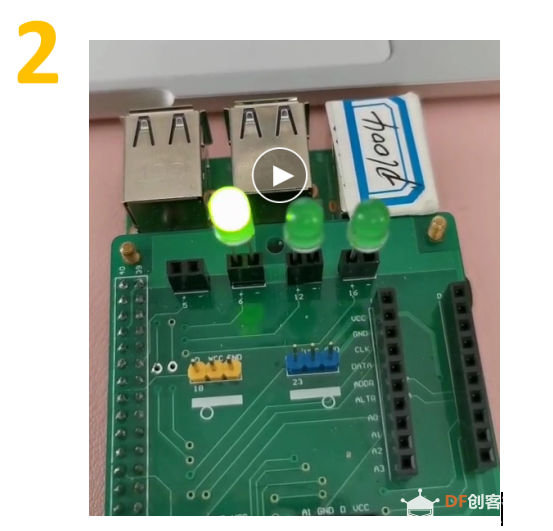 测试小灯,发现红色小灯坏的。全部换成绿色小灯,可以依次闪烁!(现在我怀疑红色小灯坏掉,是我接错了线导致烧坏了 重新换上没问题的小灯,杜邦线连接23、24、25引脚后,修改程序如下,一切正常。  第二个程序: 解决了之前线的连接和灯的问题,再升级做变速警示灯,就没那么难了。硬件不需要变动,程序引入全局变量和局部变量,加入了for语句的嵌套。 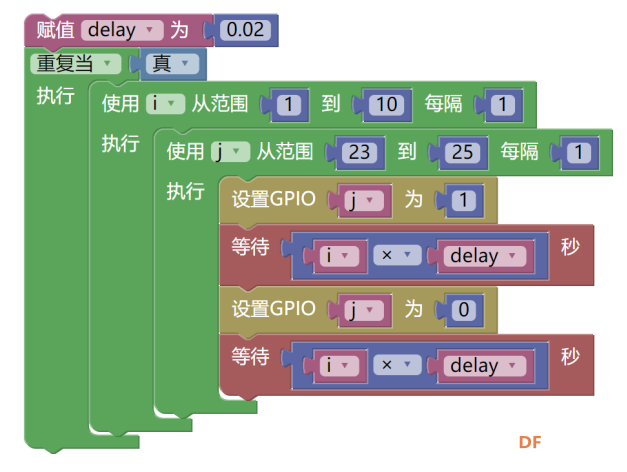 delay作为全局变量,可以在整个程序中被调用。i和j为局部变量。局部变量只在for循环内部变化。j只能被内层for循环调用,i可以被内层、外层for循环调用。 作为警示灯的三个小灯,闪烁速度在程序执行过程中发生变化。完成实验目标。 这节课后,深感对基础知识的学习尤为重要。小灯的闪烁,使用到物理知识,也使用到树莓派引脚知识。   加强基础知识补课! 加强基础知识补课! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






