|
2840| 1
|
【临沂】【杭州古德微机器人】树莓派-声控灯学习记录 |
本节课主要模拟声控灯。了解声控灯的原理。 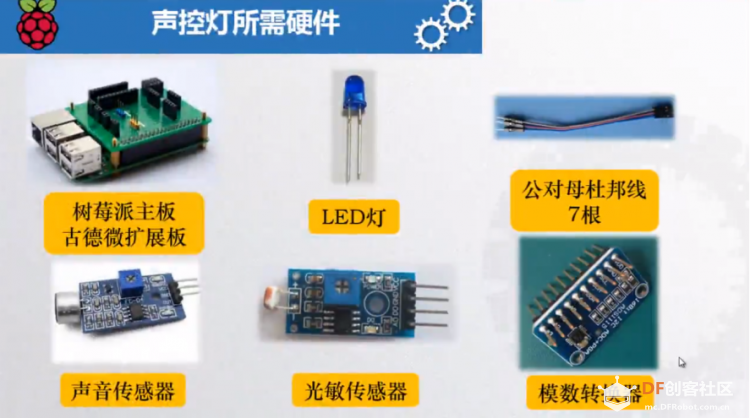 光敏传感器一般检测周围环境的亮度和光强,方向性较好,可以感知固定方向的光源。 声音传感器,相当于一个话筒,它用来接收声波,显示声音的振动图象,但不能对噪声的强度进行测量。传感器内置一个对声音敏感的电容式驻极体话筒。声波使话筒内的驻极体薄膜振动,导致电容的变化,而产生与之对应变化的微小电压。 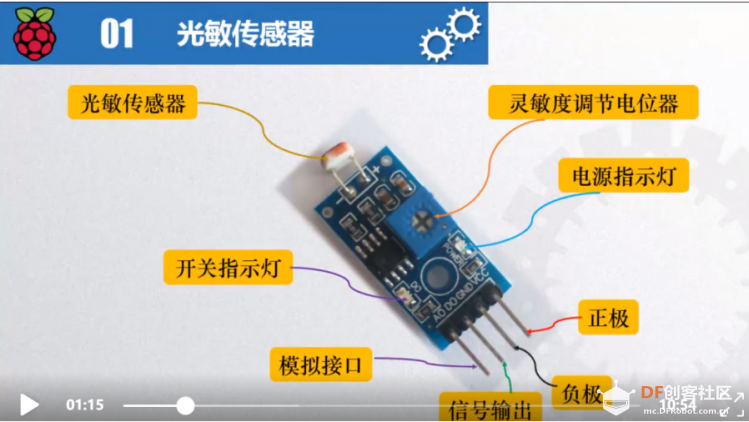 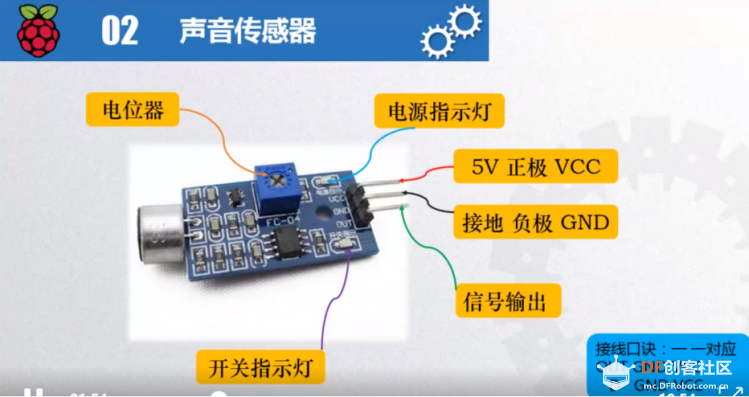 编写程序第一步,先测试输出信号。声音传感器没有声音时,输出为1,有声音时输出为0。 光感器有光线时,输出为1,没有光线,输出为0。 硬件连接图。24号引脚暂时也可以直接对应插入后边三个口 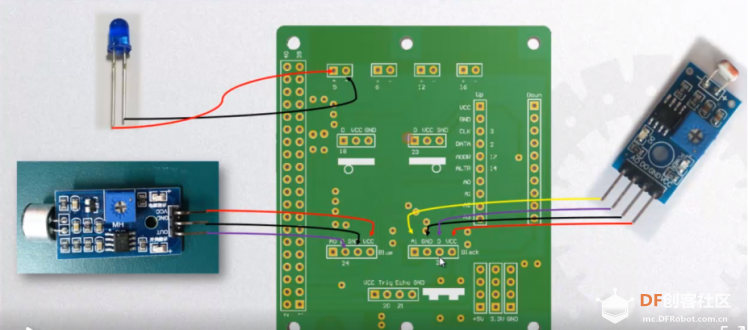 下面第一个程序测试声音传感器。 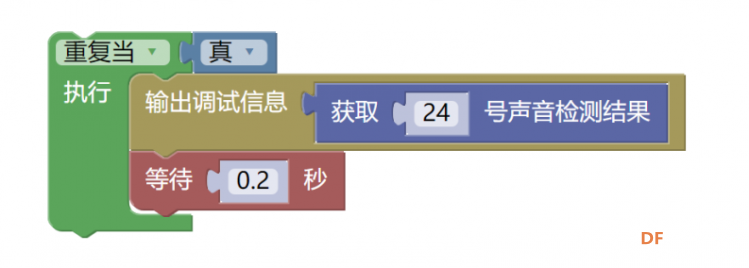 第二个程序测试光敏传感器。修改为引脚25。 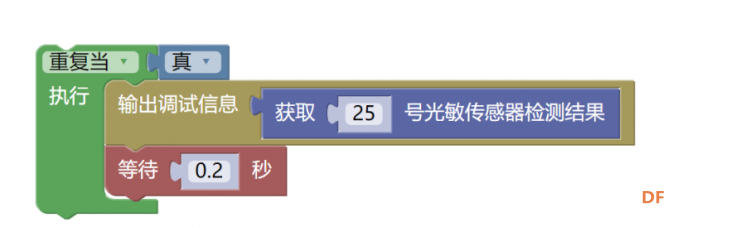 根据声控灯的工作原理,我们借助模数转换器。 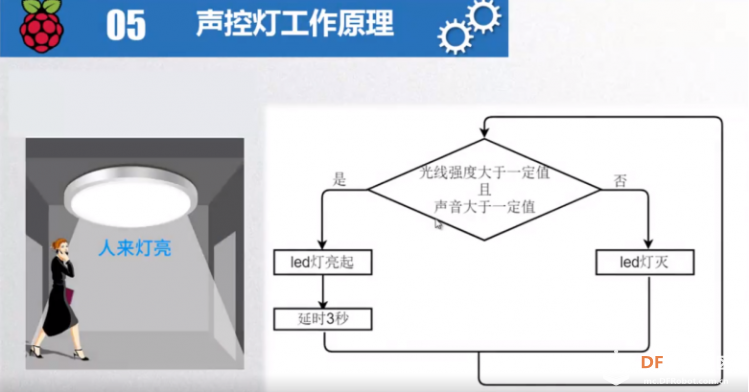 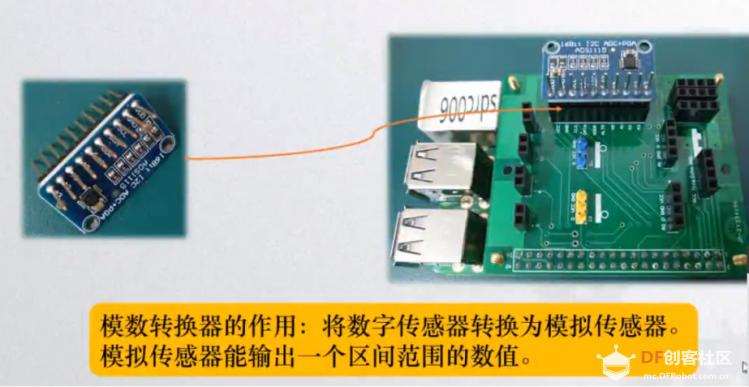 信号输出针脚链接到A0模拟接口。D表示数字接口。A表示模拟接口,0表示模拟接口号。光敏传感器拔掉模拟接口的杜邦线。使用模拟积木来测试。随着声音的强弱变化。取值从0开始。24号引脚的D口拔掉,改到AO口。25号引脚将连接D口的杜邦线拔掉。 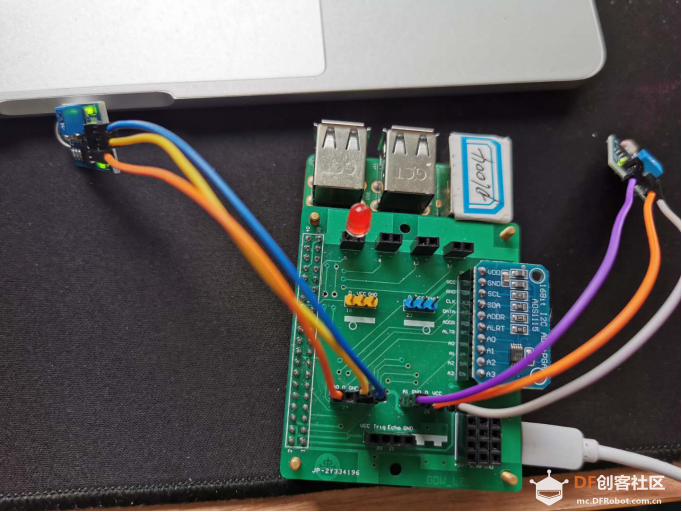 下面第一个程序测试声音传感器的取值范围。 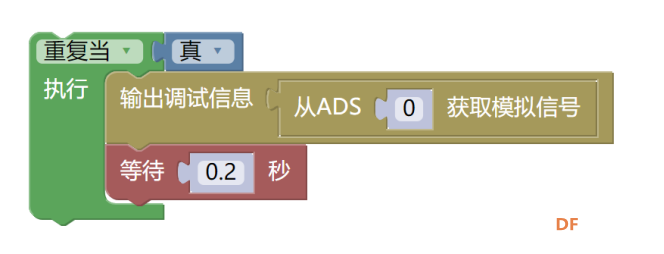 声控灯的程序如下。这里使用了“和”积木,即同时满足“和”两边的条件,5号小灯才会亮起。 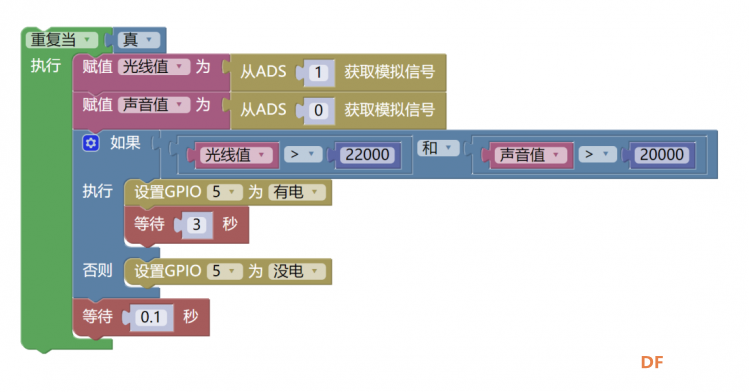 学习数字接口和模拟接口知识。分清24、25引脚上AO和D。25号引脚的2、3口与24号的相反,特别需要注意。 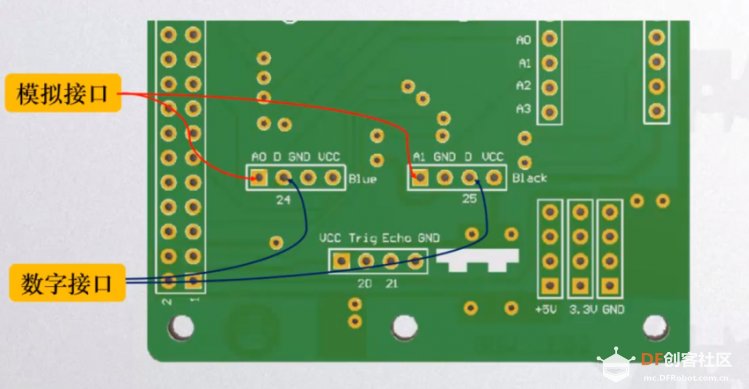 总结: 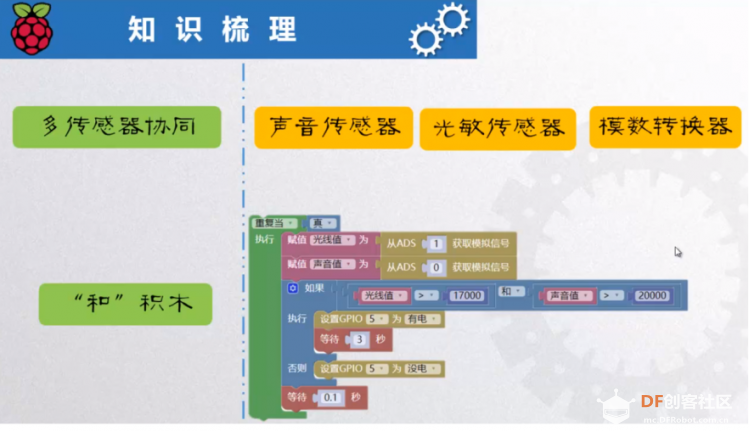 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






