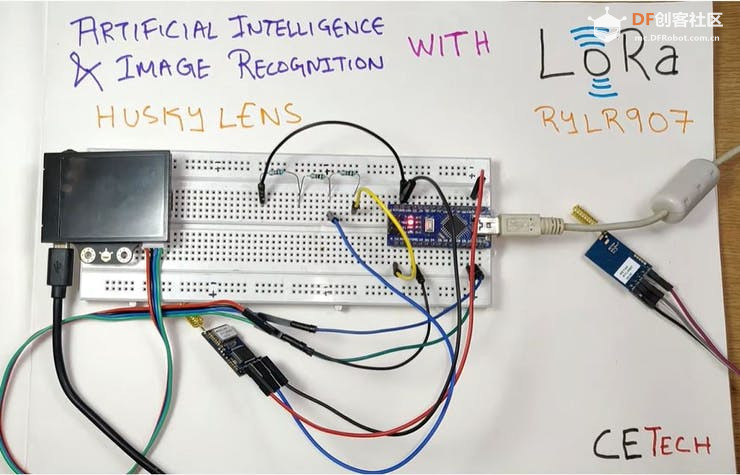
嘿,怎么了,伙计们! 这里是CETech的Akarsh。
在这个项目中,我们将了解DFRobot的HuskyLens。 它是一款由AI驱动的相机模块,能够执行多种人工智能操作,例如人脸识别,对象识别和线条识别等。它与我们在本项目中讨论过的MatchX模块有些相似。 由于MatchX模块有点贵,所以我决定自己做类似的事情,因此,我发现HuskyLens是一个不错的选择,因为与MatchX模块相比,它更便宜,并且可以做MatchX可以做的所有事情,除了数据传输,为此,我们将把Huskylens模块与Reyax的RYLR907 LoRa模块连接起来,我们会做的很好。 连接后,我们将使用此HuskyLens检测对象,并使用LoRa模块将检测到的数据发送到接收方的另一个LoRa模块。
现在让我们开始有趣的部分。
耗材:
使用的零件:
步骤1:为您的项目获取PCB
您必须浏览查看PCBWAY才能以便宜的价格在线订购PCB!
您将以便宜的价格获得10片高质量的PCB板,并已运到您的家中。 您还将在首次订购时获得打折运输。 将您的Gerber文件上传到PCBWAY,以高质量和快速的周转时间制造它们。查看他们的在线Gerber查看器功能。有了奖励积分,您可以从他们的礼品店免费获得一些物件。
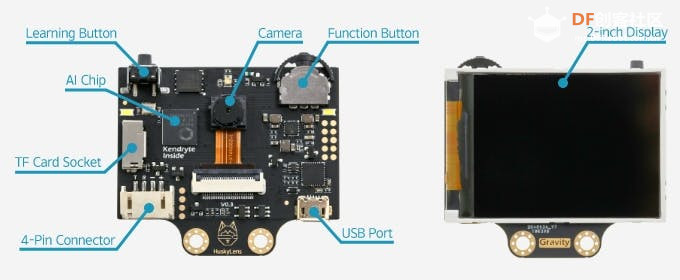
步骤2:关于HuskyLens
HuskyLens是一款易于使用的AI机器视觉传感器,具有6种内置功能:人脸识别,对象跟踪,对象识别,行跟随,颜色检测和标签检测。这是一个非常简洁的模块,在正面带有一个摄像头,在背面带有一个LCD显示屏,板上装有3个LED(2个白色和1个RGB),可以通过该软件进行控制。它上面有两个按钮,一个是用于在操作模式之间切换的滑块开关,另一个是用于捕获和了解相机前面的对象的按钮。它学得越多,就越聪明。新一代AI芯片的采用使HuskyLens能够以每秒30帧的速度检测面部。通过UART / I2C端口,HuskyLens可以连接到Arduino,Raspberry Pi或micro:bit,以帮助您进行非常有创意的项目,而无需使用复杂的算法。
其技术规格为:

- 处理器:Kendryte K210
- 图像传感器:
- SEN0305 HuskyLens:OV2640(2.0百万像素摄像头)
- SEN0336 HuskyLens PRO:OV5640(5.0MegaPixel相机)
- 供电电压:3.3〜5.0V
- 电流消耗(TYP):320mA@3.3V,230mA@5.0V(人脸识别模式; 80%背光亮度;补光)
- 连接接口:UART; I2C
- 显示:2.0英寸IPS屏幕,分辨率为320 * 240
- 内置算法:人脸识别,对象跟踪,对象识别,线条跟踪,颜色识别,标签识别
- 尺寸:52mm44.5mm / 2.051.75“
产品链接:https://www.dfrobot.com.cn/goods-2050.html
步骤3:关于RYLR907 LoRa模块
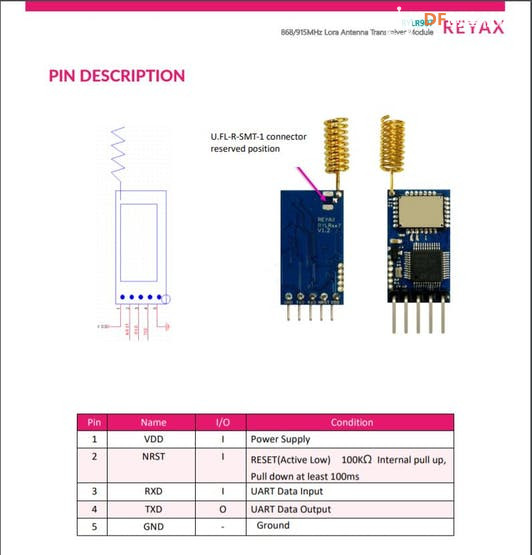
RYLR907收发器模块具有Lora远程调制解调器,该调制解调器可提供超远程扩频通信和高抗干扰性,同时将电流消耗降至最低。它配备了Semtech SX1262引擎,该引擎功能强大,具有出色的抗阻塞能力。 RYLR907的接收电流很低,可以检测通道运动以将省电CAD接收模式设置为开。它非常敏感,可以通过AT命令轻松控制。除了上述所有功能之外,它还具有内置天线并使用AES128数据加密。所有这些功能使其适用于物联网应用,移动设备,家庭安全等。
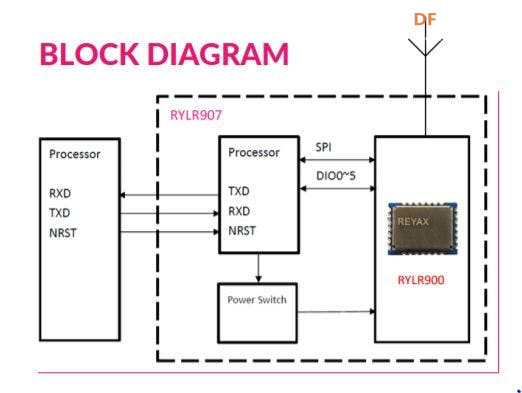
它可以用于将数据传输到千米的距离,而无需任何互联网或其他任何东西。因此,我们将使用此LoRa模块将HuskyLens收集的数据从发送器端传输到接收器端。要详细了解RYLR907模块的技术规格,您可以从这里转到其数据表。
产品链接:
https://www.amazon.com/-/zh_TW/dp/B08D6L8G2C/ref=sr_1_1?dchild=1&keywords=REYAX+RYLR907&qid=1599725348&sr=8-1
Step 4: Setting Up the Transmitter and Reciever Sections.
在这一步中,我们将进行项目的连接部分。首先,我们将HuskyLens与RYLR907 LoRa模块连接,这将使发送器端,然后,我们会将LoRa模块与ESP8266连接,使接收器端将接收由发送器发送的数据并将其显示在Arduino IDE的串行监视器。
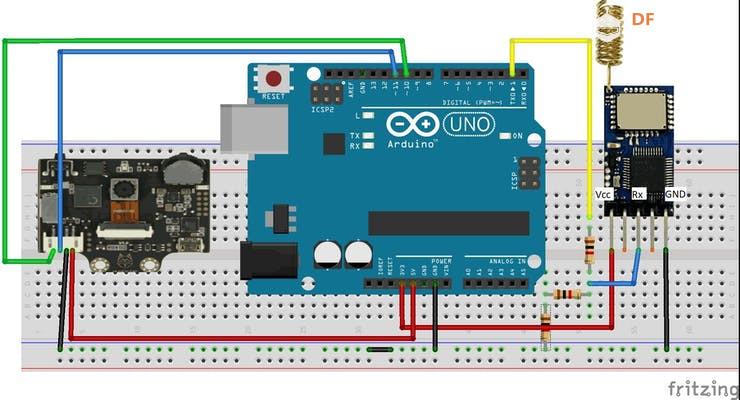
将HuskyLens与LoRa模块连接的步骤如下:
将HuskyLens的Vcc和GND引脚分别连接到Arduino的5V和GND。
将HuskyLens的引脚R和T分别连接到Arduino的11号和10号引脚。
现在拿LoRa模块并将其Vcc引脚连接到Arduino的3.3V输出,并将GND引脚连接到Arduino的GND。
如上电路图所示,通过电阻将RYLR907的Rx引脚连接到Arduino的Tx引脚。需要电阻器网络是因为Arduino在5V逻辑电平上工作,而RYLR907在3.3V逻辑电平上工作,因此可以将这些电阻降低5V至3.3V。
这样,完成了发送器部分,即HuskyLens连接。
现在对于接收器部分,我们需要一个ESP8266来控制LoRa模块以接收传输的数据。为此要进行的连接如下:
将LoRa模块的Vcc和GND引脚连接到ESP8266的3.3V和GND引脚。
将GPIO 15引脚连接到LoRa的Rx引脚,并将GPIO 13引脚连接到RYLR907模块的Tx引脚。
这样,接收器端的连接就完成了,我们现在只需要将模块连接到我们的PC并上传项目代码即可。有关此处使用的LoRa模块的详细说明以及在接收器端进行的连接,您可以查看上面的视频。
步骤5:编码模块
完成前两个部分的连接。现在剩下的唯一事情就是将Arduino和ESP连接到PC,并逐一上传项目代码。您可以从此处转到Github页面,以获取该项目的代码。
下载GitHub页面上的HuskyLens库,并将其安装到Arduino IDE。
现在打开名为“ Arduino Husky Lens Lora Code.ino”的文件,这是需要在Arduino中上载以从HuskyLens获取数据并将其发送到接收器的代码。复制此代码并将其粘贴到您的Arduino IDE中。
将Arduino连接到您的PC,选择正确的板卡和COM端口,并在代码上传后点击上传按钮,您可以断开Arduino的连接。
这样,完成了用于发送器端的编码部分。现在,您可以连接与LoRa结合使用的ESP模块,以用作接收器。
将ESP连接到PC后,再次打开Github页面,并将代码复制到名为“ ESP8266 LoRa Text.ino”的文件中,这是需要在ESP8266中上传的代码。
将代码粘贴到IDE中。选择正确的COM端口和板,然后单击上载按钮。
代码上载后,您就可以使用设置了。
步骤6:测试链接

一旦代码上传到两个模块,我们就可以通过首先打开串行监视器来检查链接,它会显示类似“没有块或箭头出现在屏幕上”的消息。这意味着HuskyLens尚未了解所显示的对象。第一次看到该物体,并且镜头无法识别该物体。因此,使其能够识别显示给它的物体或面部。我们需要显示HuskyLens对象,一旦它确认显示给它的对象,请按下学习按钮(按下按钮),这将使HuskyLens了解该对象,并在与学习到的对象相似的任何事物被识别时识别该对象如图所示。现在,当HuskyLens了解到该对象时,它将发送与其看到的对象有关的数据,并且在接收器端LoRa接收的数据将显示在串行监视器上。

通过这种方式,我们可以使用基于AI的HuskyLens识别对象,收集有关它们的数据,并在LoRa模块的帮助下将收集的数据传输到位于几公里外的另一个LoRa模块。
这就是本教程,希望您喜欢它
英文链接:LoRa Image and Video transmission wireless | AI on HuskyLens
英文作者:CETechCommon9899
中文翻译:DFRobot






 沪公网安备31011502402448
沪公网安备31011502402448

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员






