【K210】【MaixPy】二、Maix Dock入门之Timer、PWM基础模块,实现一个变色呼吸灯(效果参考罗技G502)
官方文档点这里
1、Timer模块
K210中包含3个的定时器,每个定时器有4个通道可用。
1.1、构造函数
class machine.Timer(id, channel, mode=Timer.MODE_ONE_SHOT, period=1000, unit=Timer.UNIT_MS, callback=None, arg=None, start=True, priority=1, div=0)
1.2、参数
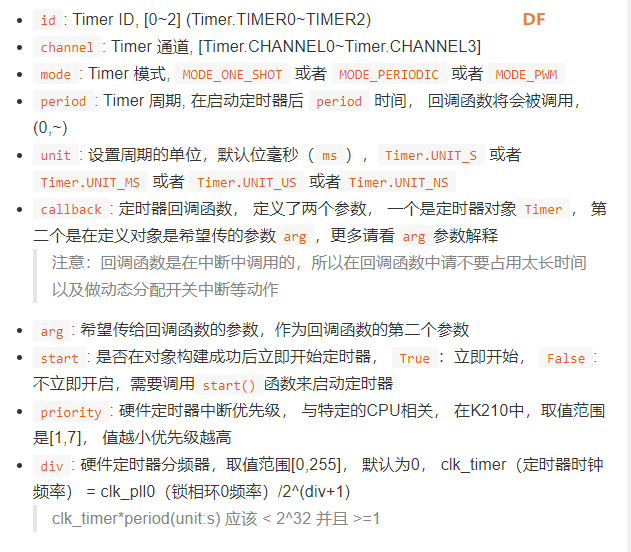
mode参数解析:
MODE_ONE_SHOT:一拍模式,即只能单次触发中断
MODE_PERIODIC:周期模式,可以多次触发中断
MODE_PWM:PWM模式
关于callback:
可以将回调函数看成中断服务函数,在此选项中输入中断函数名称,在时间按到达要求之后即可调用该函数。
1.3、例程
例程1:
定时3秒后打印信息
from machine import Timer
def on_timer(timer):#定义中断服务函数
print("time up:",timer)#打印定时器设置信息
print("param:",timer.callback_arg())#打印创建对象时输入的arg参数(如果是函数名称则输入函数存放地址)
#于Timer0的0通道设置3s触发的单次中断
tim = Timer(Timer.TIMER0, Timer.CHANNEL0, mode=Timer.MODE_ONE_SHOT, period=3000, callback=on_timer, arg=on_timer)
print("period:",tim.period())#打印周期即时间
串行终端输出信息:
period: 3000
>>> time up: [MAIXPY]Timer:(802f0660) timer=0, channel=0, mode=0, period=3000ms, priority=1, div=0, callback=802f05e0, arg=802f05e0
param: <function on_timer at 0x802f05e0>
例程2:
每隔 1 秒打印消息, 停止 5 秒后再重启, 5 秒后关闭并注销定时器
import time
from machine import Timer
def on_timer(timer):#定义中断服务函数
print("time up:",timer)#打印定时器设置信息
print("param:",timer.callback_arg())#打印创建对象时输入的arg参数(如果是函数名称则输入函数存放地址)
#于Timer0的0通道设置1s触发的中断,设置优先级1(小→高),设置定时器不启动,时钟不分频
tim = Timer(Timer.TIMER0, Timer.CHANNEL0, mode=Timer.MODE_PERIODIC, period=1, unit=Timer.UNIT_S, callback=on_timer, arg=on_timer, start=False, priority=1, div=0)
print("period:",tim.period())#打印周期即时间
tim.start()#启动定时器
time.sleep(5)#延时5S
tim.stop()#关闭定时器
time.sleep(5)#延时5S
tim.restart()#再次启动定时器
time.sleep(5)#延时5S
tim.stop()#关闭定时器
del tim#注销定时器、注销硬件占用、关闭硬件时钟
串行终端输出信息:
period: 1
time up: [MAIXPY]Timer:(802f02c0) timer=0, channel=0, mode=1, period=1s, priority=1, div=0, callback=802eff60, arg=802eff60
param: <function on_timer at 0x802eff60>
time up: [MAIXPY]Timer:(802f02c0) timer=0, channel=0, mode=1, period=1s, priority=1, div=0, callback=802eff60, arg=802eff60
param: <function on_timer at 0x802eff60>
time up: [MAIXPY]Timer:(802f02c0) timer=0, channel=0, mode=1, period=1s, priority=1, div=0, callback=802eff60, arg=802eff60
param: <function on_timer at 0x802eff60>
time up: [MAIXPY]Timer:(802f02c0) timer=0, channel=0, mode=1, period=1s, priority=1, div=0, callback=802eff60, arg=802eff60
param: <function on_timer at 0x802eff60>
time up: [MAIXPY]Timer:(802f02c0) timer=0, channel=0, mode=1, period=1s, priority=1, div=0, callback=802eff60, arg=802eff60
param: <function on_timer at 0x802eff60>
time up: [MAIXPY]Timer:(802f02c0) timer=0, channel=0, mode=1, period=1s, priority=1, div=0, callback=802eff60, arg=802eff60
param: <function on_timer at 0x802eff60>
time up: [MAIXPY]Timer:(802f02c0) timer=0, channel=0, mode=1, period=1s, priority=1, div=0, callback=802eff60, arg=802eff60
param: <function on_timer at 0x802eff60>
time up: [MAIXPY]Timer:(802f02c0) timer=0, channel=0, mode=1, period=1s, priority=1, div=0, callback=802eff60, arg=802eff60
param: <function on_timer at 0x802eff60>
time up: [MAIXPY]Timer:(802f02c0) timer=0, channel=0, mode=1, period=1s, priority=1, div=0, callback=802eff60, arg=802eff60
param: <function on_timer at 0x802eff60>
time up: [MAIXPY]Timer:(802f02c0) timer=0, channel=0, mode=1, period=1s, priority=1, div=0, callback=802eff60, arg=802eff60
param: <function on_timer at 0x802eff60>
1.4、附录
常量表:
TIMER0: Timer0 id
TIMER1: Timer1 id
TIMER2: Timer2 id
CHANNEL0: Timer 通道 0
CHANNEL1: Timer 通道 1
CHANNEL2: Timer 通道 2
CHANNEL3: Timer 通道 3
MODE_ONE_SHOT: Timer 只运行一次(回调一次)
MODE_PERIODIC: Timer 始终运行(连续回调)
MODE_PWM: 定时器不用来回调函数,用以产生PWM
UNIT_S: 单位秒 (s)
UNIT_MS: 单位毫秒 (ms)
UNIT_US: 单位微秒 (us)
UNIT_NS: 单位纳秒 (ns)
2、PWM功能设置
Maix Dock开发板上刚好有一个RGB LED可以用来做彩灯以检验PWM的实现。关于点灯方面的教程戳这里。
2.1、构造函数
class machine.PWM(tim, freq, duty, pin, enable=True)
2.2、参数
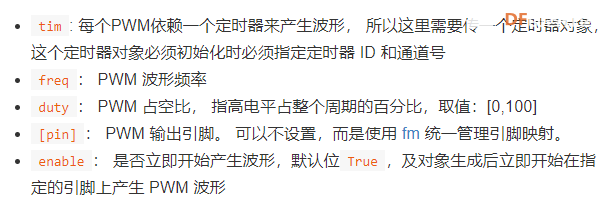
!!注意!!:
实测duty参数为低电平占整个周期的百分比
2.3、例程
例程1:
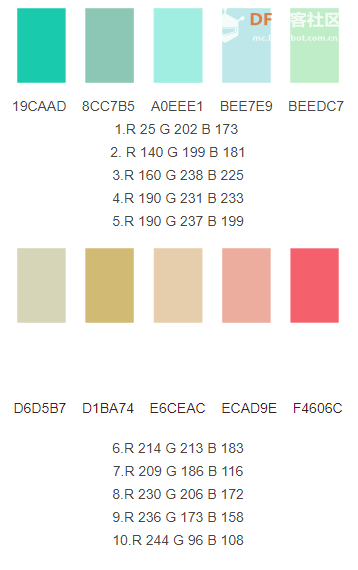
十种颜色轮流切换。
from machine import Timer,PWM
import time
from fpioa_manager import board_info
Tim0 = Timer(Timer.TIMER0, Timer.CHANNEL0, mode=Timer.MODE_PWM)#新建定时器对象于定时器0,0通道
Tim1 = Timer(Timer.TIMER0, Timer.CHANNEL1, mode=Timer.MODE_PWM)
Tim2 = Timer(Timer.TIMER0, Timer.CHANNEL2, mode=Timer.MODE_PWM)
LEDR = PWM(Tim0, freq=500000, duty=0, pin=board_info.LED_R)#新建PWM对象于Tim0定时器对象,频率500000Hz,duty为0,映射到LED_R引脚
LEDG = PWM(Tim1, freq=500000, duty=0, pin=board_info.LED_G)
LEDB = PWM(Tim2, freq=500000, duty=0, pin=board_info.LED_B)
'''
1.R 25 G 202 B 173
2.R 140 G 199 B 181
3.R 160 G 238 B 225
4.R 190 G 231 B 233
5.R 190 G 237 B 199
6.R 214 G 213 B 183
7.R 209 G 186 B 116
8.R 230 G 206 B 172
9.R 236 G 173 B 158
10.R 244 G 96 B 108
'''
ColorIndex = 0 #颜色索引
Duty=0 #待计算的占空比
#RGB数值列表
ValR = [25 , 140, 160, 190, 190, 214, 209, 230, 236, 244]
ValG = [202, 199, 238, 231, 237, 213, 186, 206, 173, 96 ]
ValB = [173, 181, 255, 233, 199, 183, 116, 172, 158, 108]
while True:
Duty = 100 - ((ValR[ColorIndex] / 255) * 100)#根据RGB数值计算出相应的占空比参数
LEDR.duty(Duty)
Duty = 100 - ((ValG[ColorIndex] / 255) * 100)
LEDG.duty(Duty)
Duty = 100 - ((ValB[ColorIndex] / 255) * 100)
LEDB.duty(Duty)
time.sleep_ms(1500) #延时1.5s
if ColorIndex < len(ValR) - 1: #使颜色于1~10轮流切换
ColorIndex += 1
else:
ColorIndex = 0
对应颜色表:
例程1++:
相较于例程1使用了渐变切换的效果。
from machine import Timer,PWM
import time
from fpioa_manager import board_info
Tim0 = Timer(Timer.TIMER0, Timer.CHANNEL0, mode=Timer.MODE_PWM)#新建定时器对象于定时器0,0通道
Tim1 = Timer(Timer.TIMER0, Timer.CHANNEL1, mode=Timer.MODE_PWM)
Tim2 = Timer(Timer.TIMER0, Timer.CHANNEL2, mode=Timer.MODE_PWM)
LEDR = PWM(Tim0, freq=500000, duty=100, pin=board_info.LED_R)#新建PWM对象于Tim0定时器对象,频率500000Hz,duty为0,映射到LED_R引脚
LEDG = PWM(Tim1, freq=500000, duty=100, pin=board_info.LED_G)
LEDB = PWM(Tim2, freq=500000, duty=100, pin=board_info.LED_B)
'''
红:255 0 0
橙: 255 125 0
黄:255 255 0
绿:0 255 0
靛: 0 255 255
蓝:0 0 255
紫: 255 0 255
'''
ColorIndex = 1 #颜色索引
Duty = 0 #待计算的占空比
DutyTempR = 0 #占空比临时值R
DutyTempG = 0 #占空比临时值G
DutyTempB = 0 #占空比临时值B
OperateTemp = 0 #计算产生的临时变量,用于使DutyTemp逼近Duty
#RGB数值列表
ValR = [255, 255, 255, 0 , 0 , 0 , 255]
ValG = [0 , 125, 255, 255, 255, 0 , 0 ]
ValB = [0 , 0 , 0 , 0 , 255, 255, 255]
#初始化RGB LED 使显示第一组颜色
Duty = 100 - ((ValR[0] / 255) * 100)#根据RGB数值计算出相应的占空比参数
DutyTempR = Duty
LEDR.duty(Duty) #赋值
Duty = 100 - ((ValG[0] / 255) * 100)#根据RGB数值计算出相应的占空比参数
DutyTempG = Duty
LEDG.duty(Duty) #赋值
Duty = 100 - ((ValB[0] / 255) * 100)#根据RGB数值计算出相应的占空比参数
DutyTempB = Duty
LEDB.duty(Duty) #赋值
time.sleep_ms(2000) #延时2s
while True:
#R
Duty = 100 - ((ValR[ColorIndex] / 255) * 100)#根据RGB数值计算出相应的占空比参数
OperateTemp = Duty - DutyTempR #计算总差值
OperateTemp /= 10 #差值分10次补偿给DutyTemp
while DutyTempR != Duty:
if OperateTemp > 0 and DutyTempR > Duty:#解决因小数精度问题而无法满足循环解除条件的问题
break
if OperateTemp < 0 and DutyTempR < Duty:#解决因小数精度问题而无法满足循环解除条件的问题
break
DutyTempR += OperateTemp #差值补偿
if DutyTempR > 100: #防溢出操作
DutyTempR = 100
elif DutyTempR < 0:
DutyTempR = 0
LEDR.duty(DutyTempR) #赋值
time.sleep_ms(100) #延时100ms
LEDR.duty(DutyTempR) #最终赋确定值,此时DutyTemp=Duty
#G
Duty = 100 - ((ValG[ColorIndex] / 255) * 100)#根据RGB数值计算出相应的占空比参数
OperateTemp = Duty - DutyTempG #计算总差值
OperateTemp /= 10 #差值分10次补偿给DutyTemp
while DutyTempG != Duty:
if OperateTemp > 0 and DutyTempG > Duty:#解决因小数精度问题而无法满足循环解除条件的问题
break
if OperateTemp < 0 and DutyTempG < Duty:#解决因小数精度问题而无法满足循环解除条件的问题
break
DutyTempG += OperateTemp #差值补偿
if DutyTempG > 100: #防溢出操作
DutyTempG = 100
elif DutyTempG < 0:
DutyTempG = 0
LEDG.duty(DutyTempG) #赋值
time.sleep_ms(100) #延时100ms
LEDG.duty(DutyTempG) #最终赋确定值,此时DutyTemp=Duty
#B
Duty = 100 - ((ValB[ColorIndex] / 255) * 100)#根据RGB数值计算出相应的占空比参数
OperateTemp = Duty - DutyTempB #计算总差值
OperateTemp /= 10 #差值分10次补偿给DutyTemp
while DutyTempB != Duty:
if OperateTemp > 0 and DutyTempB > Duty:#解决因小数精度问题而无法满足循环解除条件的问题
break
if OperateTemp < 0 and DutyTempB < Duty:#解决因小数精度问题而无法满足循环解除条件的问题
break
DutyTempB += OperateTemp #差值补偿
if DutyTempB > 100: #防溢出操作
DutyTempB = 100
elif DutyTempB < 0:
DutyTempB = 0
LEDB.duty(DutyTempB) #赋值
time.sleep_ms(100) #延时100ms
LEDB.duty(DutyTempB) #最终赋确定值,此时DutyTemp=Duty
time.sleep_ms(1500) #延时1.5s
if ColorIndex < len(ValR) - 1: #使颜色于红~紫轮流切换
ColorIndex += 1
else:
ColorIndex = 0
————————————————
版权声明:本文为CSDN博主「Joseph Cooper」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_43444989/article/details/107401333



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







