|
8676| 4
|
[教程] 基于flask框架的树莓派4B视频操控小车2~小车动起来 |
|
一、知识准备 1.GPIO (树莓派通过GPIO发送命给L298N电机驱动板,控制小车运动) GPIO(英语:General-purpose input/output),通用型之输入输出的简称 ; 其接脚可以供使用者由程控自由使用,PIN脚依现实考量可作为通用输入(GPI)或通用输出(GPO)或通用输入与输出(GPIO)。 2.L298N驱动模块(驱动2个电机) L298N,是一款接受高电压的电机驱动器,直流电机和步进电机都可以驱动。一片驱动芯片可同时控制两个直流减速电机做不同动作,在6V到46V的电压范围内,提供2安培的电流,并且具有过热自断和反馈检测功能。实验室标配,价格便宜,资料满天飞。 本帖侧重点为树莓派小车构架及移动功能实现 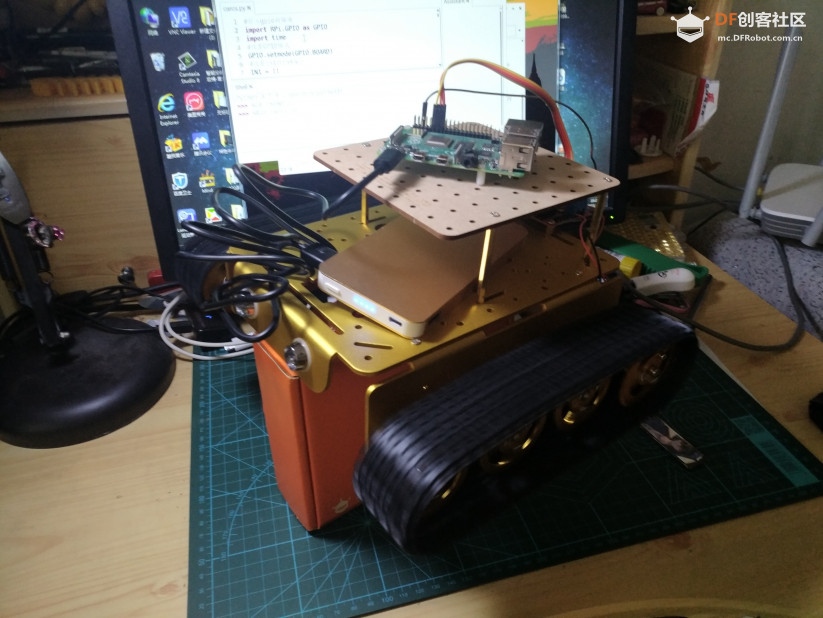 二、硬件准备 1.树莓派4B*1 https://www.dfrobot.com.cn/goods-1976.html 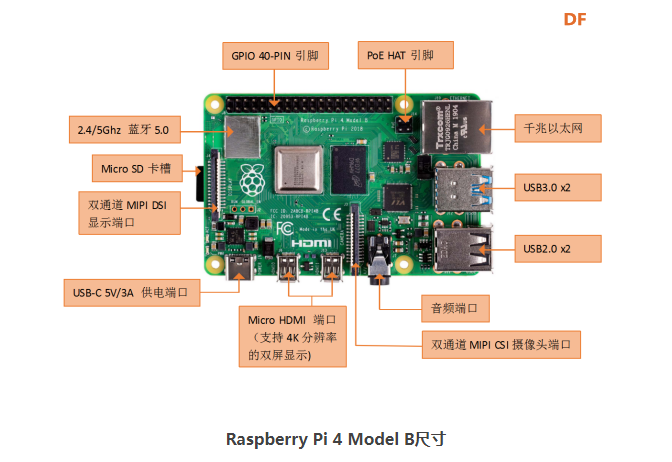 2.L298N电机驱动模块*1 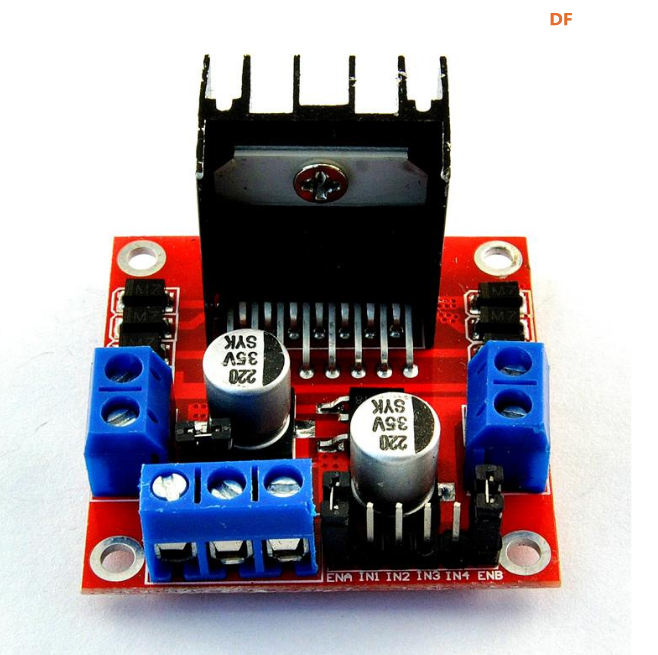 3.履带小车底盘一套  4.18650电池*2+电池盒*1(负责给马达供电) 5.充电宝*1(负责树莓派舵机运行) 6.杜邦线母头对母头若干根(连接树莓派和L298N) 三、小车连线图 1.左右蓝色的两路分别连接电机M1和M2 2.18650电池盒正极连接12V供电,负极接GND, 移动电源通过USB Type-C给树莓派供电 注意,树莓派需要和电池盒共地即树莓派GND针脚要和电池盒负极共地 3.蓝色连接IN1连接树莓派11针脚 绿色连接IN2连接树莓派13针脚 黄色连接IN1连接树莓派15针脚 红色连接IN1连接树莓派16针脚 注意黑色连线6号针脚;树莓派GND和电池组共地 4.通道A使能和通道B使能可以不接,这样小车可以运动但无法调速。 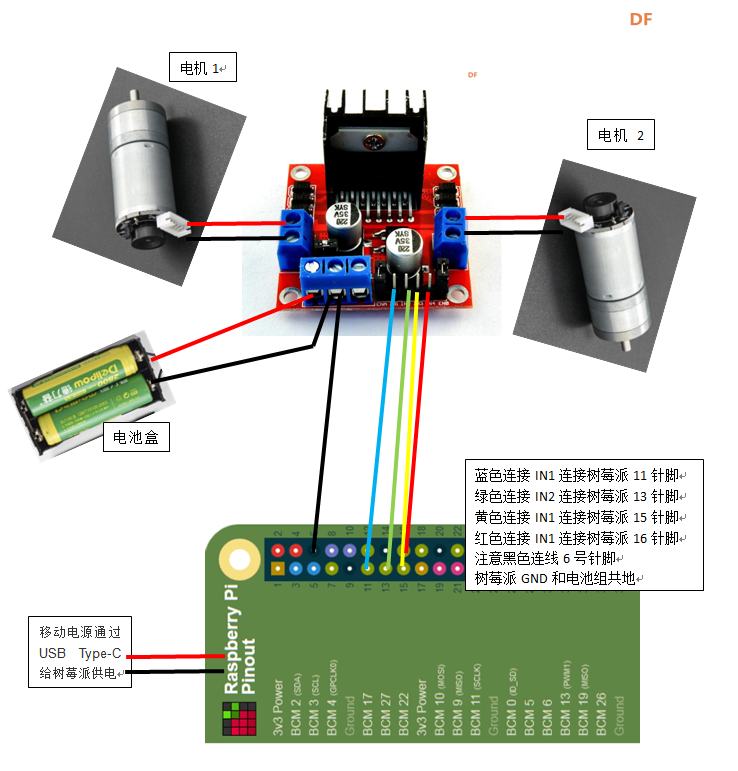 四、电机转动原理 电机正反转动实现: 输入信号端IN1接高电平,输入端IN2接低电平,电机M1正转。(如果信号端IN1接低电平, IN2接高电平,电机M1反转。) 电机M2是同样的方式,输入信号端IN3接高电平,输入端IN4接低电平,电机M2正转。(反之反转)。 使能通道A和B未连接,所以PWM信号暂不做分析。  五、线路电机局部细节图 1.18650电池两节,充电宝一个(输出为5V2A,所以树莓派没装屏幕)  2.安装18650电池;我的马达是6pin的,参照说明书,只连接1正-2负针即可运行 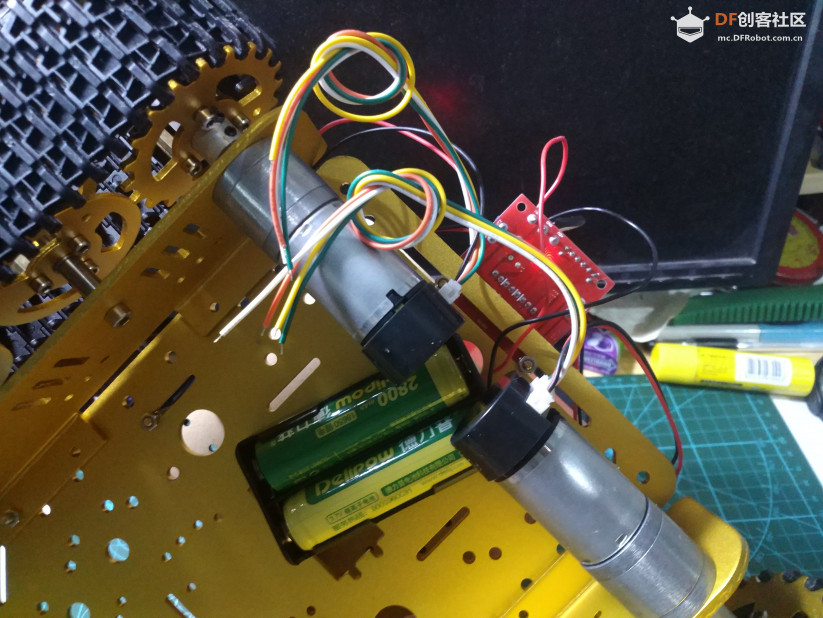 3.树莓派模块和L298N模块连接 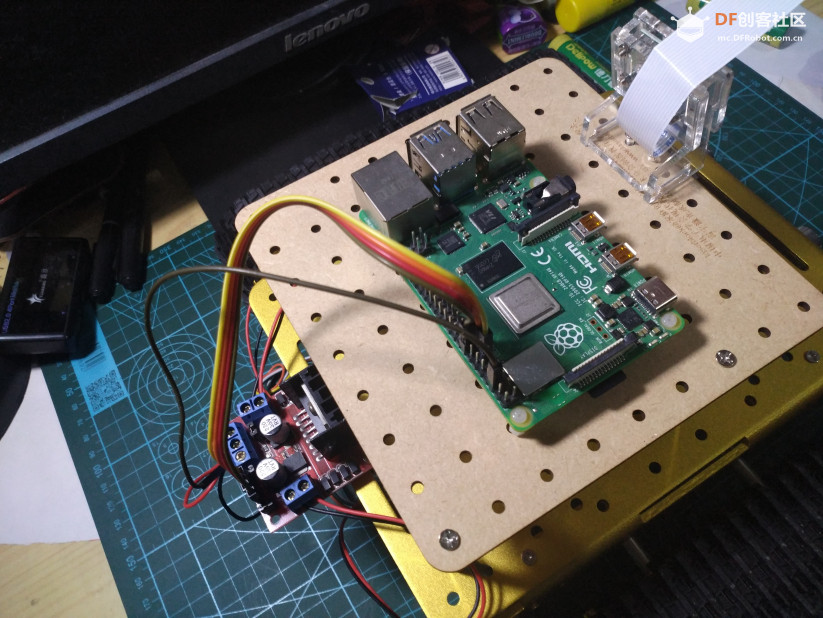 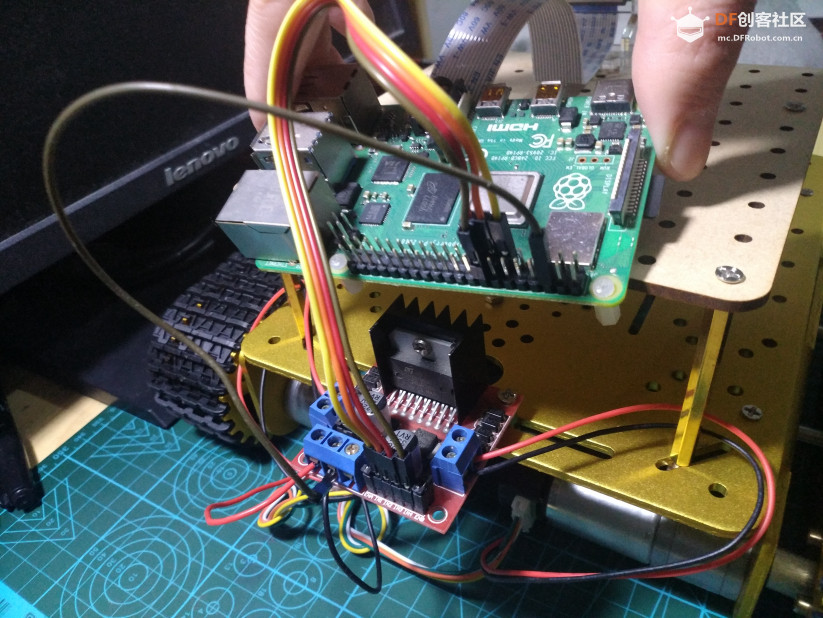 此处注意树莓派和电池共地,否则没有电位差马达不运行 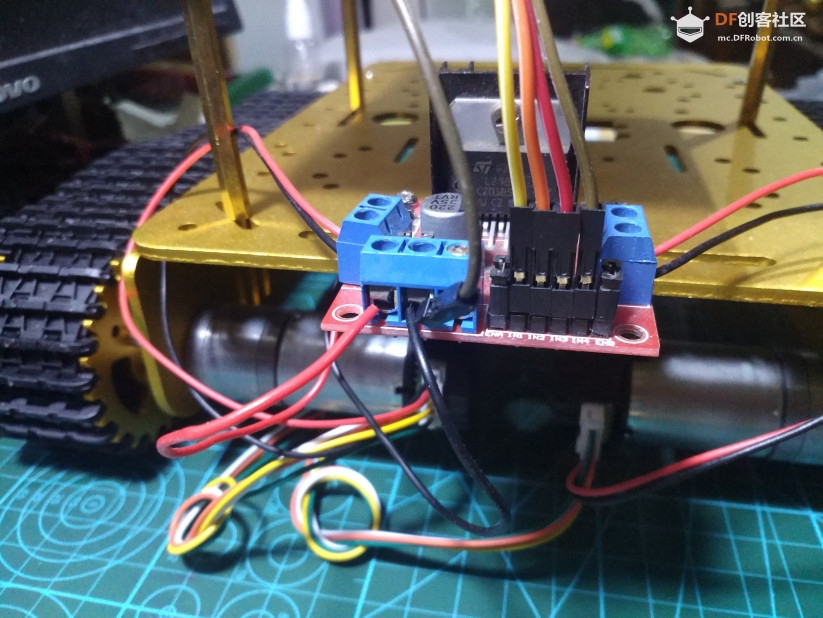 4.整体效果图,摄像头应用明天专贴说明 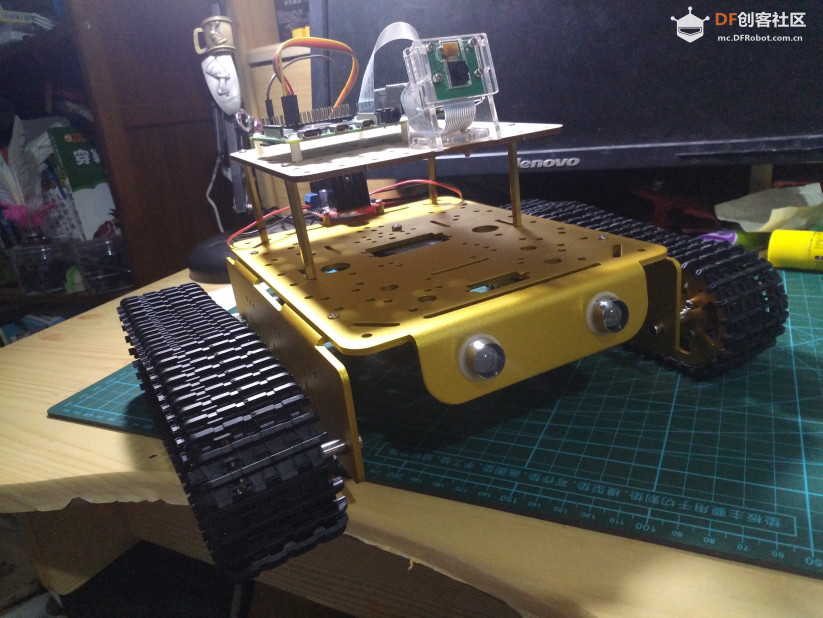  六、代码实现 树莓派VNC登录调试  小车正转测试 小车连续运转测试 小车实地测试 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 创客造
创客造
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






