|
10528| 1
|
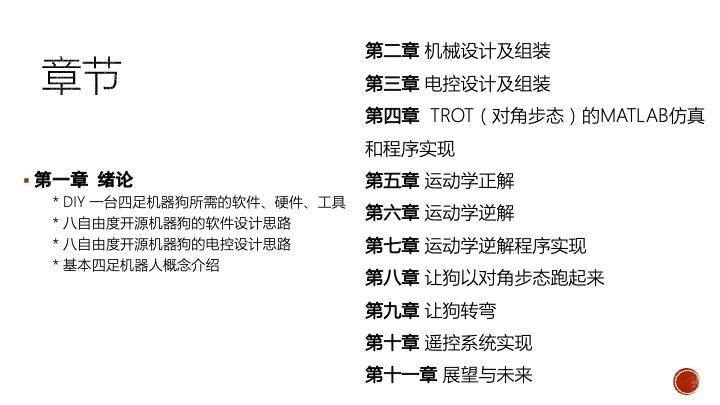
[教程] 学习笔记|灯哥0基础DIY四足机器人指南(1)--绪论 |
|
本帖最后由 KIKI 于 2021-5-24 16:56 编辑
PY-apple Dog 菠萝狗
GITHUB: https://github.com/ToanTech/py-apple-quadruped-robot 本节课讲的内容:
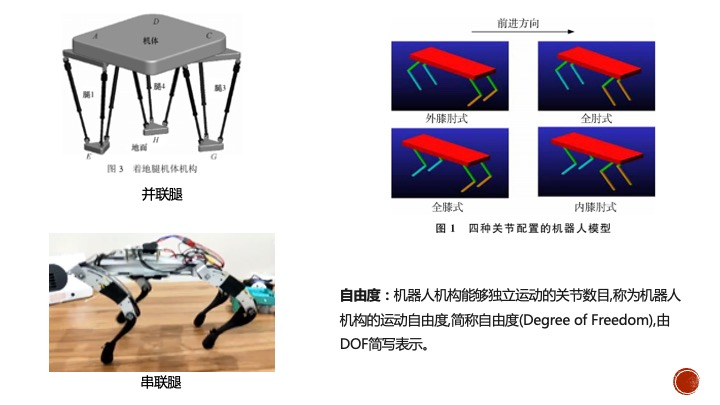
串联腿
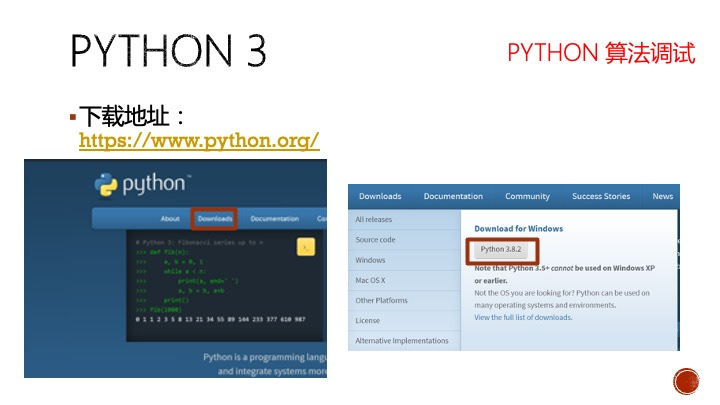
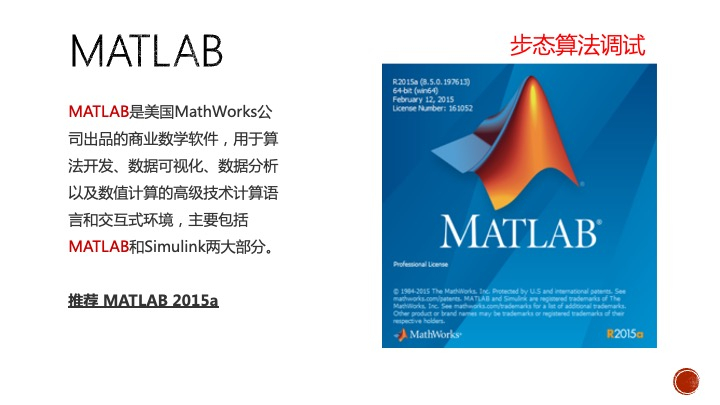
需要下载的软件
硬件材料
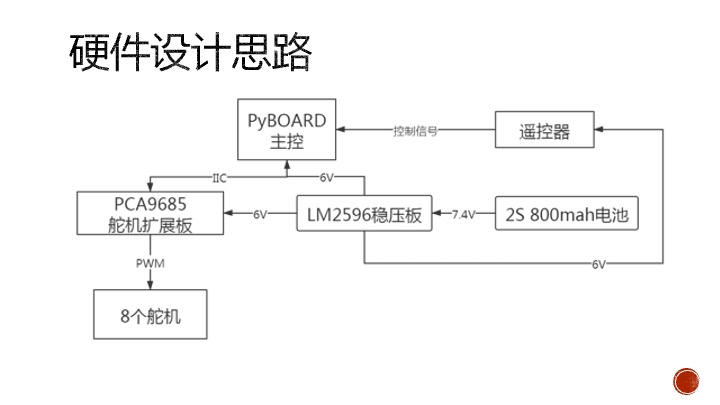
硬件设计思路
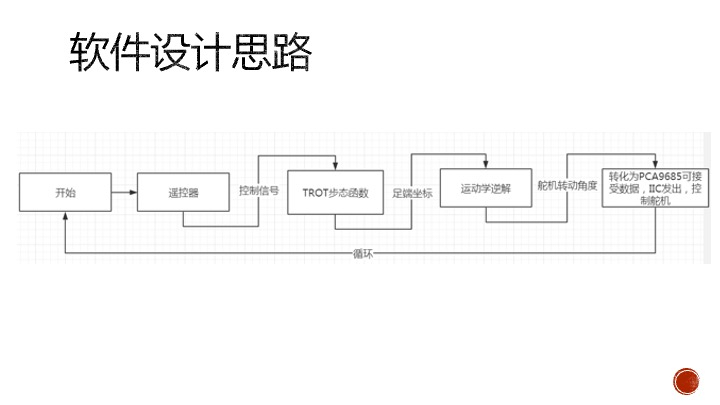
软件设计思路
需要克服的问题:
最近几天发现Up主发了一个新版本的课程,是一样的内容但是讲的更详细了,还好我看完第一课就发现了。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed




 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员






