|
60844| 38
|
[项目] 3D+Arduino四足脱机版完整教程 |
之前在论坛中发了3D+Arduino四足脱机版的帖子,但是一直没有完成,现将详细帖子内容发大家。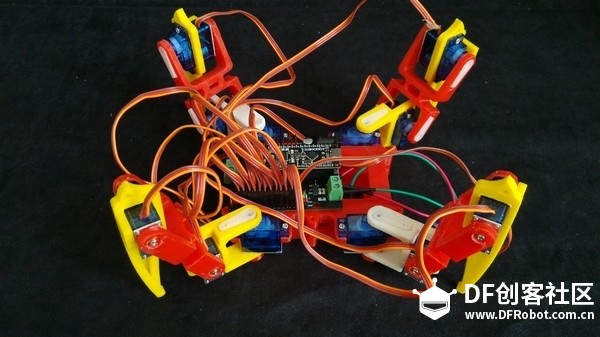 先来张效果图 项目器材
制作步骤: 机械结构部分 1. 用3D打印机打印出虫子的机械结构 四足机器人由身体(上下盖)、关节、连接件、脚几部分构成,为了保证打印件强度,打印填充率设置为50%,suppott type:touching bulidplate,plateform adhesion type:brim具体如下所示。 身体部分由上下两部分组成,用于存放7.4V电池和主控板。CURA中设置打印在参数时候,请务必按照下图所示的方向设置,进行打印,确保打印构件的效果。 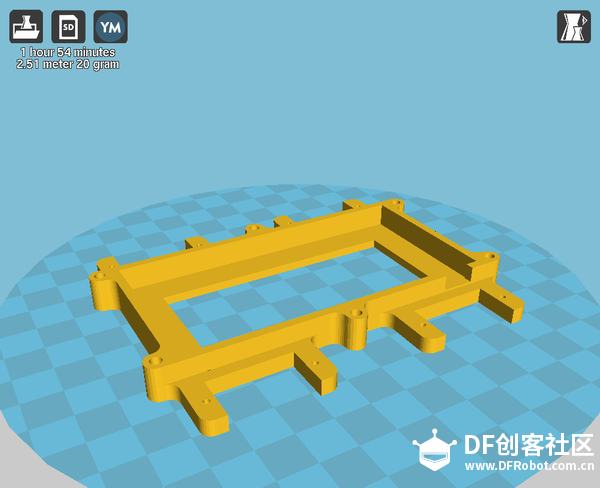 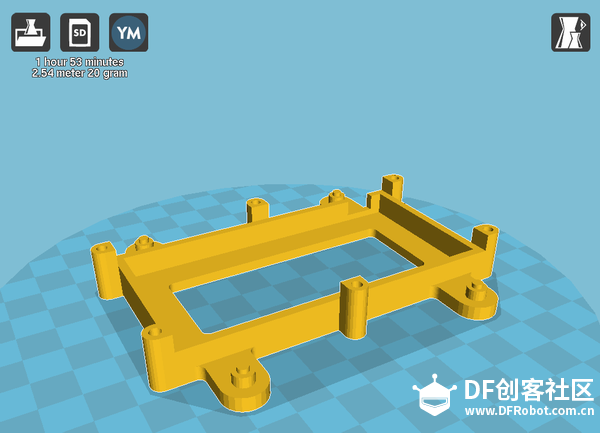 关节部分,分为左右两边,共四个打印件,打印时各打印2份,如果想一次打印完成的话可以打印设置如下图,在Cura中选中左关节,点击鼠标右键,弹出快捷菜单中选择“Multiply object”弹出下列对话框如图,Number of copies框中的值设置为1,这样下图将出现2个一样的左关节模型。同理设置右关节模型。 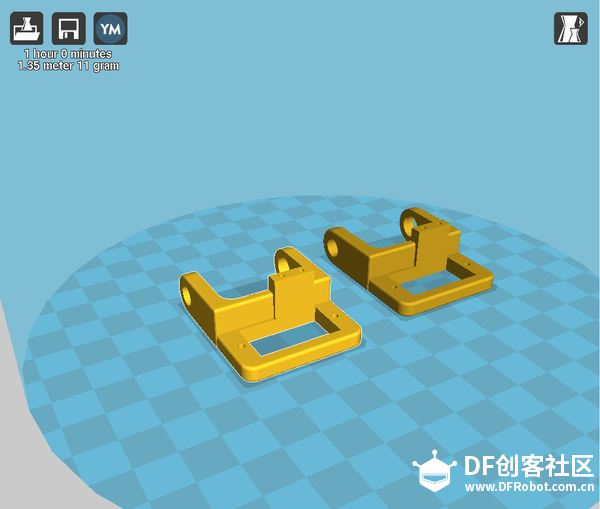 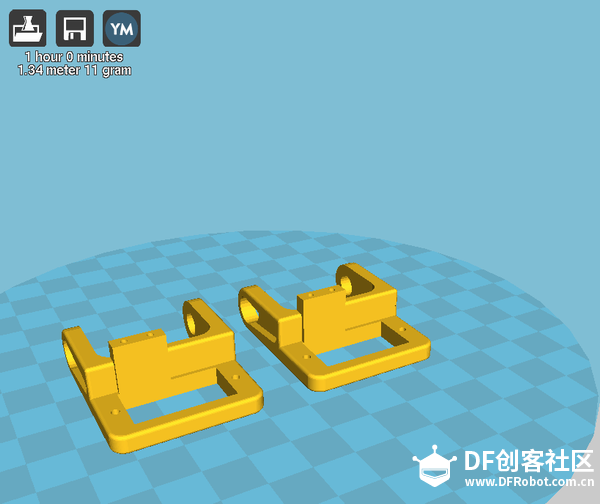 关节连接件用于连接关节和脚,按上述方法设置如下,打印2份。 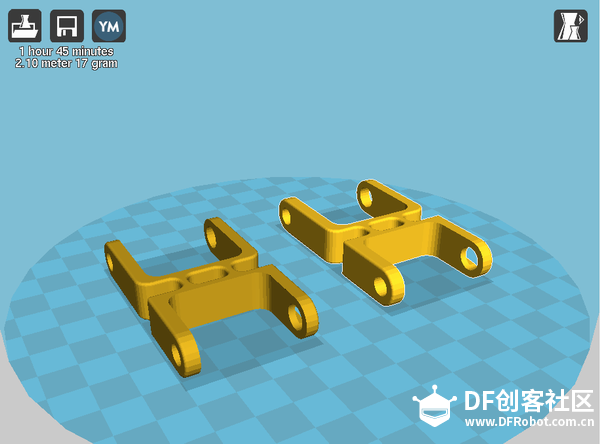 四脚部分,分左右两类,按下图方式各打印1份。 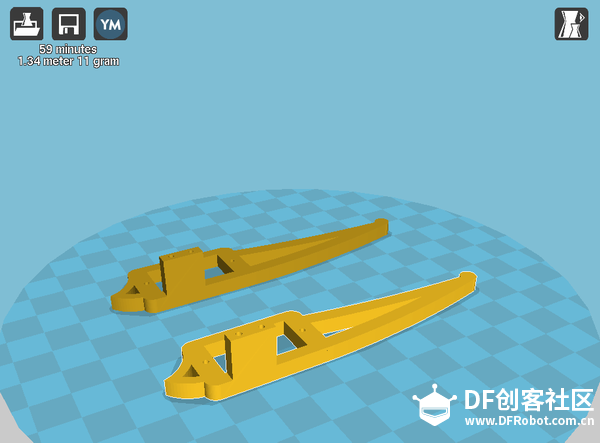 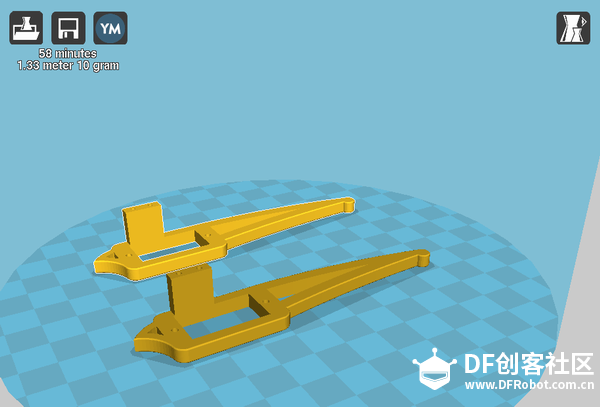 组件安装: 1. 舵机测试 在组装舵机与机械件前,一定要确定所用的舵机在电气性能上是完好的,分别将舵机与数字口2连接,刷入下列程序代码你将看到舵机在0-180之间来回摆动。  舵机数据口接线顺序黄色为数据口,红色为+,褐色为-,如下所示。 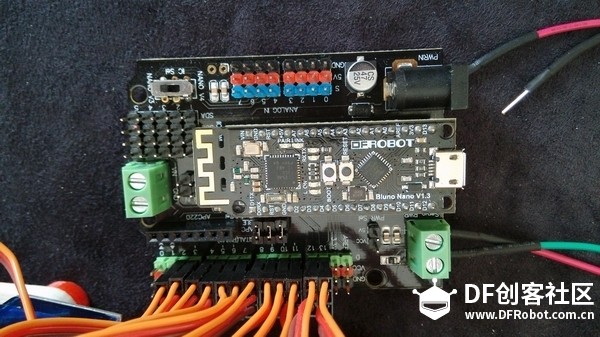 7.安装电池 四足机器人使用了拓展板和Nano主控板,我们分别对其进行供电。Nano供电采用9v,拓展板PWM供电使用7.4V 电池供电,上步安装过程已经介绍。   8.初始化舵机位置 通过下面测试程序舵机。上传"legs_init" 代码到 Arduino主控版激活舵机。 完成上述步骤后,断开电源,调整各舵机位置,如下图所示,并安装伺服摇臂。并拧紧所有螺钉。 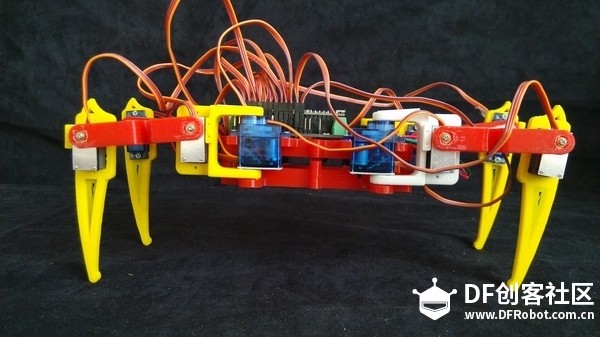 9.最后上传”Go”代码到主控板,上传完成后测试效果可以看到,四足机器人完成下面的动作。 [注]程序代码中使用了库flexitimer2,如果没有安装此库,程序编译会报错。请下载flexitimer2文件夹,并将该文件夹拷贝至C:\Program Files\Arduino\libraries下,并确保flexitimer2是根目录。 1.站起来,等待2秒 2.向前5步,等待2秒 3.后退5步,等待2秒 4.右转,等待2秒 5.左转,等待2秒 6.挥舞爪子,等待2秒 7.收回爪子,等待2秒 8.坐下,等待2秒 9. 回到1 自此四足机器人脱机版完成了,打开电源,让你的四足机器人走起。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






