|
8409| 1
|
[入门教程] 掌控板科学探究 | 打开核桃的力量,这种姿势你一定不..... |

本帖最后由 Mr Guo 于 2021-8-23 21:49 编辑  图 1 #项目起源# 大家好,我是旺仔爸爸,有一天夜里伏案疾书,看到桌上诱惑了多日的核桃,就想把它收入腹中,可是没有夹核桃的工具,用锤子砸的话声音太大难免影响他人,突发奇想用台虎钳试一下吧,没想到秒开,真是太爽了,打开核桃的方式其实多种多样,屡见不鲜,但打开一个核桃到底需要多大的力量呢?这是我想要一探究竟的,于是就有了今天这样一个作品——打开坚果并测量力量的工具,这次以科学探究实验的形式呈现出来,面向对象为中小学生  图 2自制打开坚果并测力的工具 先通过下面的视频来了解一下本次的装置是如何打开各种坚果的 #视频展示# #方案介绍# 要测量打开一个核桃的力量,可以有多种方法,比如目测观察法,传感器检测法 为了让数据精确量化,从小培养同学们严谨的科学态度,我们选择传感器测量具体数值的方法 问题的关键是要选择一个什么样的测量传感器 旺仔爸爸比较了两款传感器,分别是电阻式压力传感器和重量传感器,如图3为电阻式压力传感器 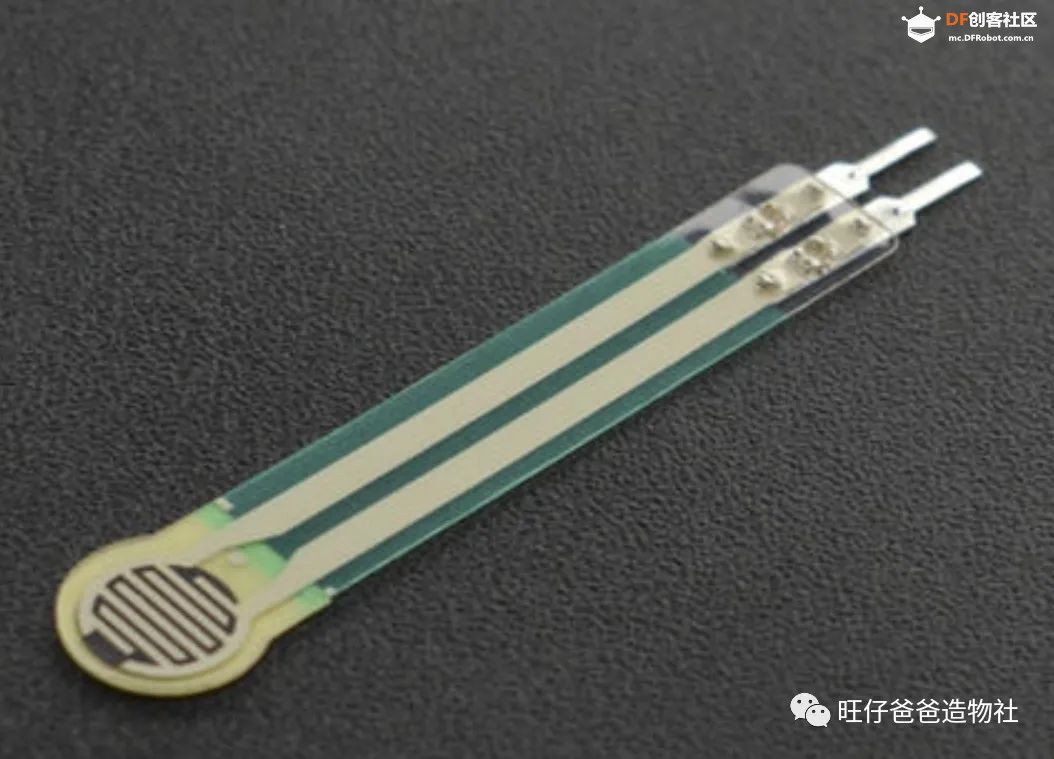 图 3电阻式压力传感器 其中电阻式压力传感器的工作原理为当感应区受压时,在底层彼此断开的线路会通过顶层的压敏层导通,端口的电阻输出值随着压力变化,压力越大电阻越小。即在不同压力情况下,传感器电阻值不一样,当受到压力值过大和过小时,电阻值的斜率也会过大或者过小,该传感器较适合定性测量。定量测量时可能会出现数据误差太大的问题。 于是我们尝试了第二款重量传感器,如图4 重量传感器能够感知自身所受重量变化,并把重量转化为电信号。重量传感器的转接模块会利用内置的程序解读电压变化,输出控制器可以理解的模拟或者数字信号。  图 4重量传感器 既然重量传感器可以准确称重,我想去量化打开一个核桃的力量数据应该也是准确的,于是打算测试一下 测量传感器我们确定为重量传感器,量程为5KG 接着,我们需要确定控制器 此次项目作为科学探究实验,自然要适合学生易上手好操作,掌控板自带屏幕和联网功能,非常适合中小学生使用,我们选择掌控板作为控制器,如图5  图 5 掌控板 控制器和传感器确定后,我们参考台虎钳来设计打开核桃的机械结构,台虎钳如图6  图 6台虎钳 我们采用了丝杆、法兰、T型丝杆转换块以及手轮来模拟台钳样子的机械结构,机械结构零件如图7所示  图 7机械结构零件 电子部件和机械部件方案确定后,我们开始展开制作 #实验教具设计# 首先我们来看一下都用到了哪些器材 #器材清单#
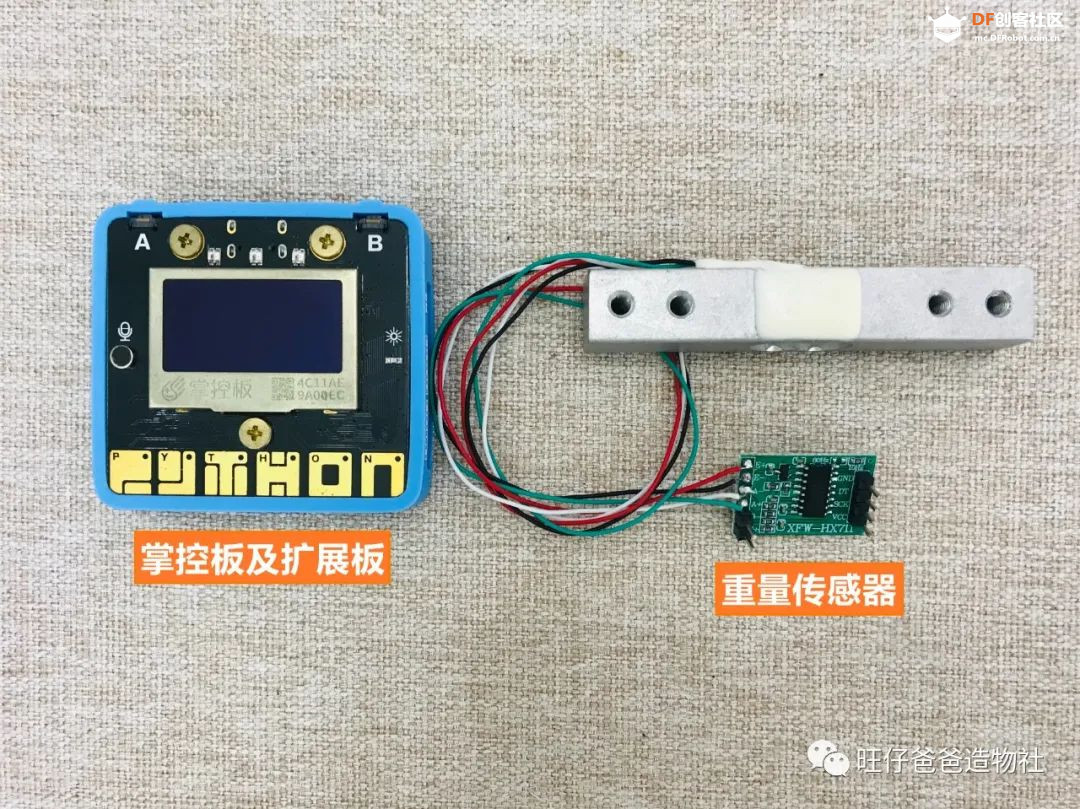 图 8器材清单实物图 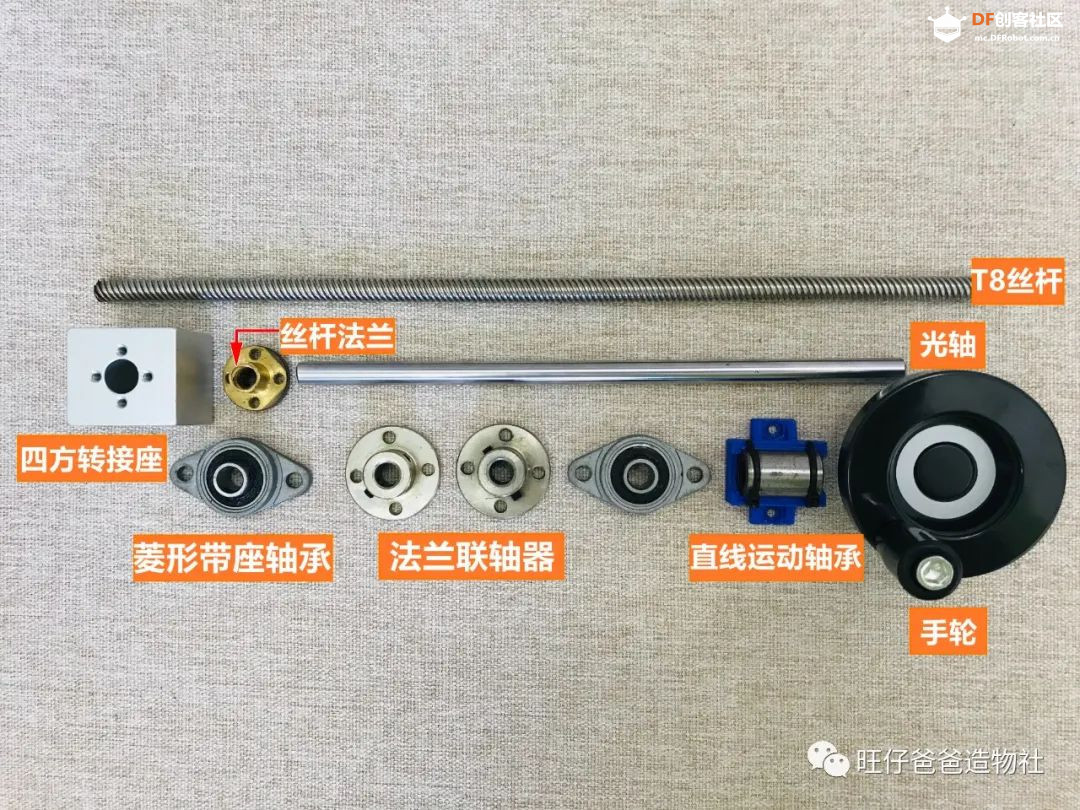 图 9机械结构实物图 接着我们来设计外观结构的图纸 #结构设计# 我们使用LaserMaker绘图软件设计图纸,为了保证装置的强度,材料选择6mm的奥松板,本次夹核桃的装置,我们将所有部件放置在一块6mm厚的奥松板上,图纸设计需要确定掌控板固定孔位的尺寸以及固定光轴和丝杆的轴承、底座尺寸,将掌控板固定在一个云朵造型的木板上,光轴使用圆形轴承固定在竖板上,最后是重量传感器的固定,我们参照如图10所示的方式设计结构,只不过我们需要将这样的结构竖起来安装 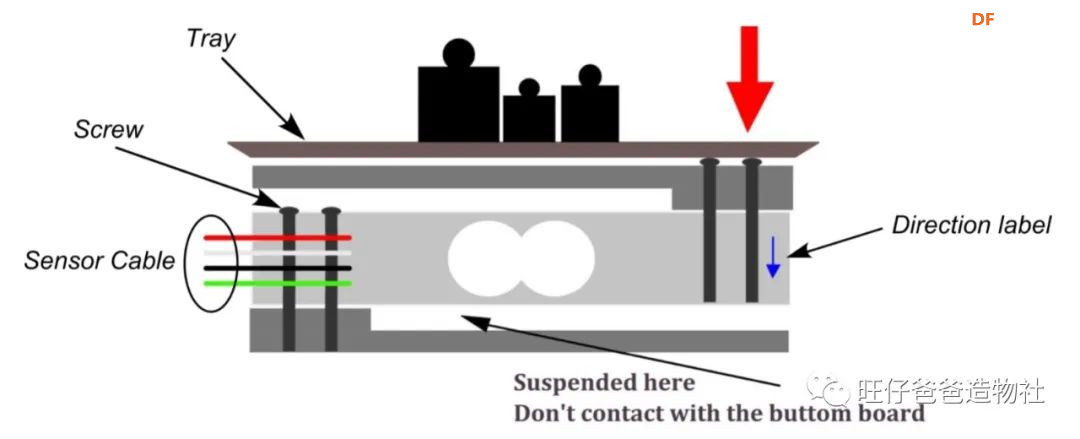 图 10重量传感器安装示例 图纸设计完成,如下图11所示 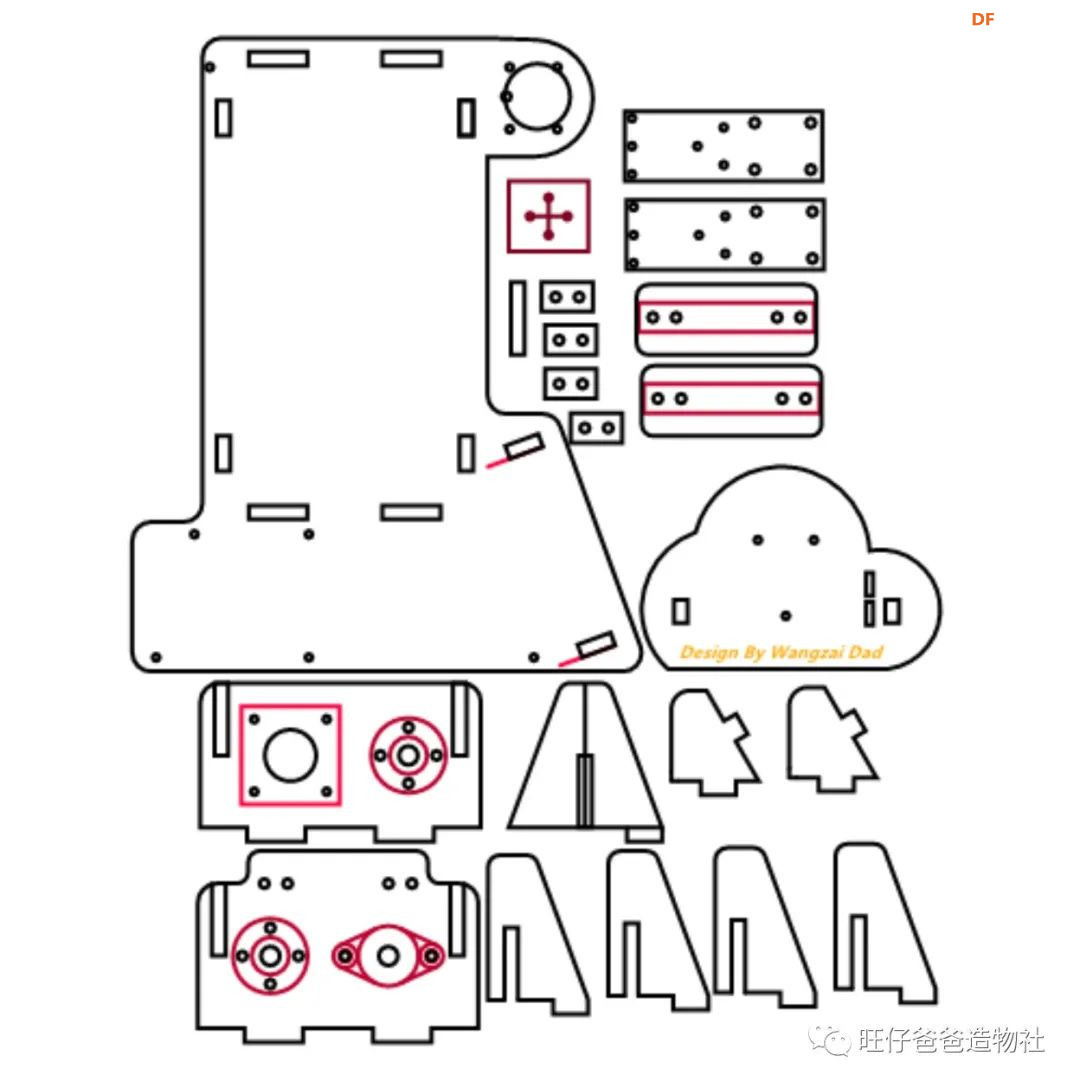 图 11本次作品结构设计图 使用激光切割机加工完成后的实物图如下图12所示 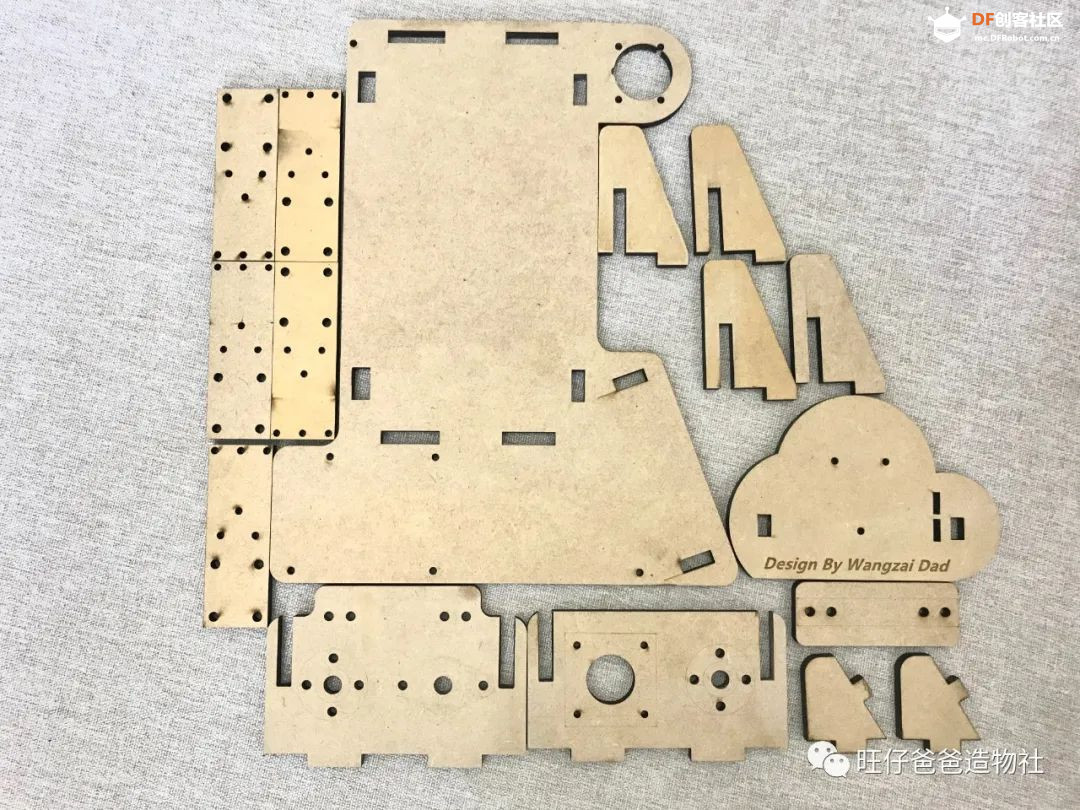 图 12切割完成后的零件实物图 #电路设计# 本次夹核桃的装置,接线图非常的简单,我们只需要将重量传感器的DOUT、SCK引脚与掌控板的P0、P1引脚连接即可,接线示意图如下图13所示 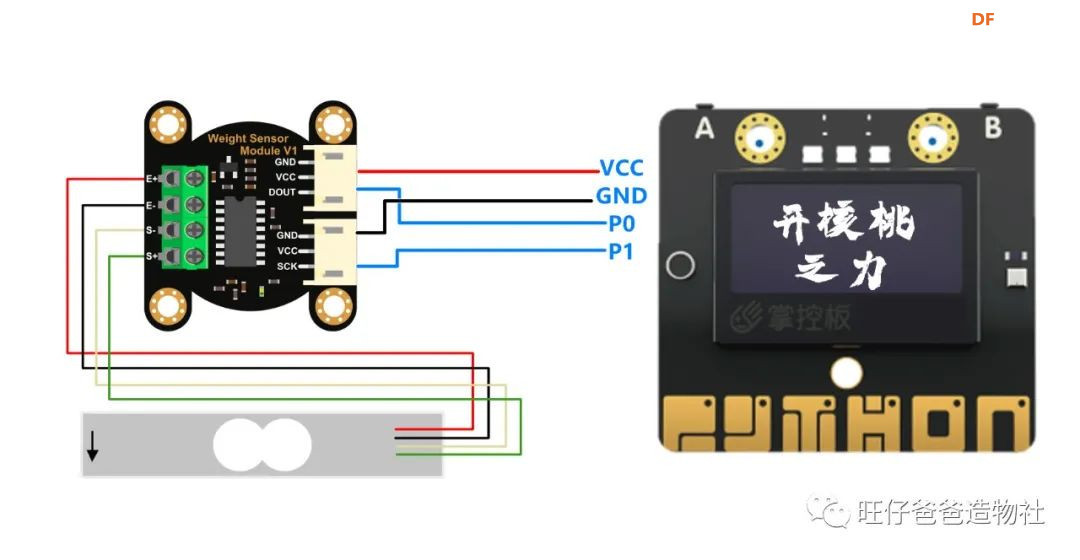 图 13夹核桃装置接线示意图 #组装# 第一步,组装控制器,所需零件如下图14 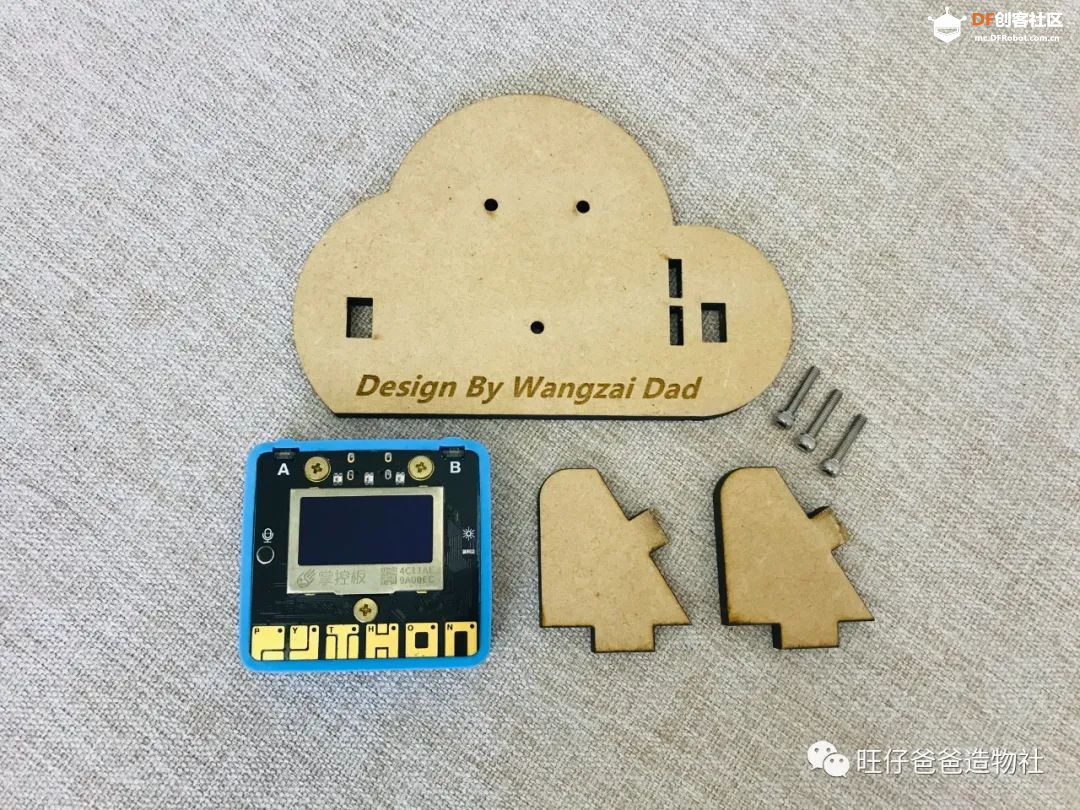 图 14组装控制器所需零件 使用3颗直径3mm长度15mm的螺丝将掌控板固定在云朵造型的木板上,如图15  图 15固定掌控板 之后,将两个支架安装在云朵造型木板的背面,如图16  图 16安装两个支架 接着将云朵的造型安装在底板上如图17 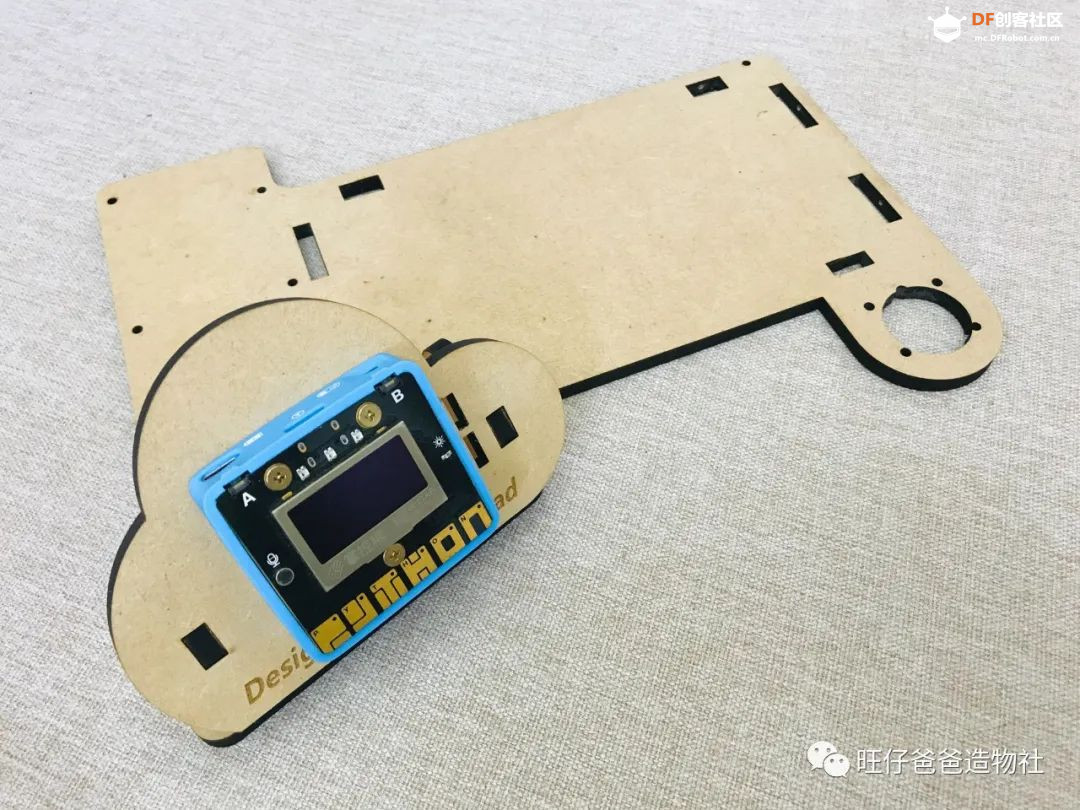 图 17将云朵造型安装在底板上  图 18云朵造型安装完成背面图 第二步,安装重量传感器,所需零件如下图19 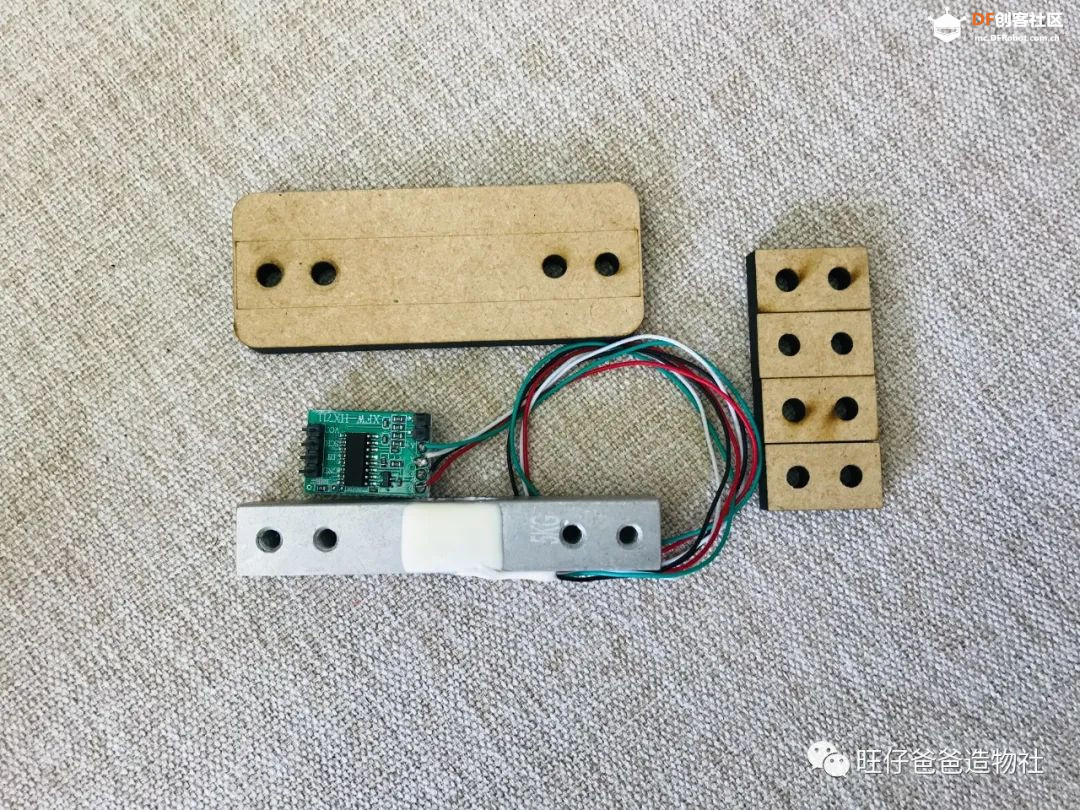 图 19安装重量传感器所需零件 将四块小垫片按下图20所示方式与重量传感器组装,使用直径4mm长度30mm的螺丝固定  图 20重量传感器组装  图 21重量传感器组装 第三步,接着在两块竖板中安装零件,所需零件如下图22 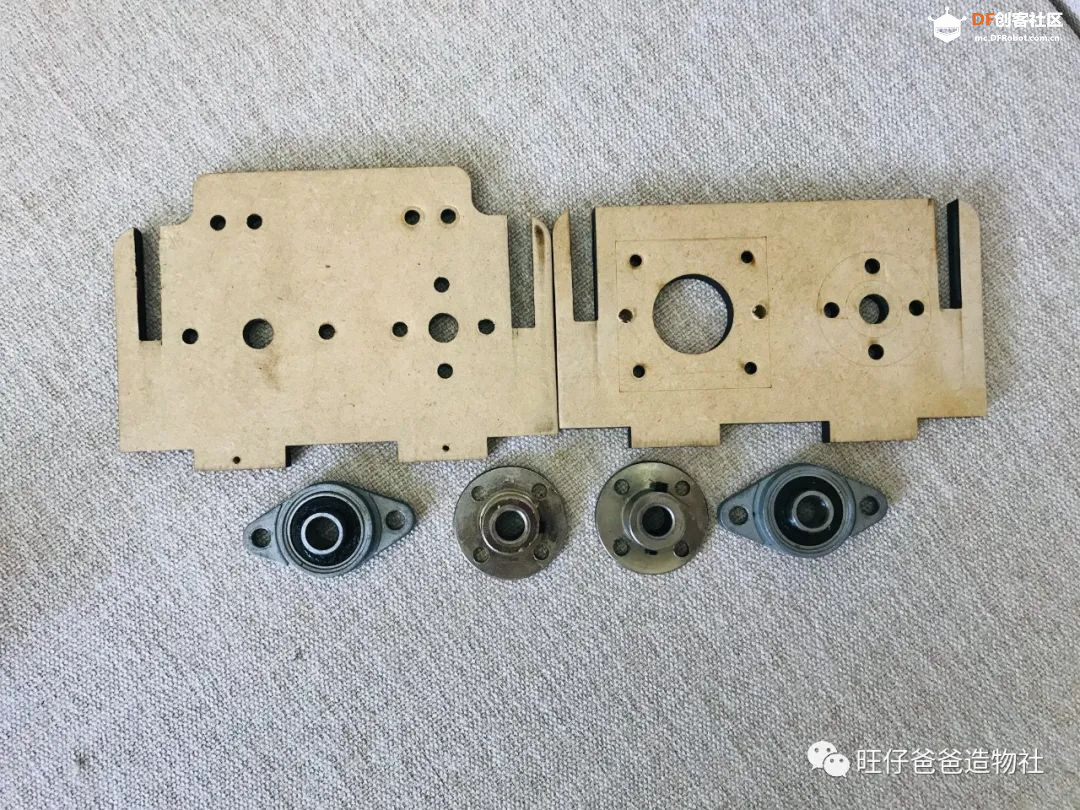 图 22安装竖板需要的零件 使用直径4mm的螺丝将菱形带坐轴承和法兰联轴器固定在竖板上,如下图23所示,其中右侧的竖板是用来安装重量传感器的  图 23零件安装在竖板上 第四步,将重量传感器安装在图23中右侧的竖板上,安装完成如图24 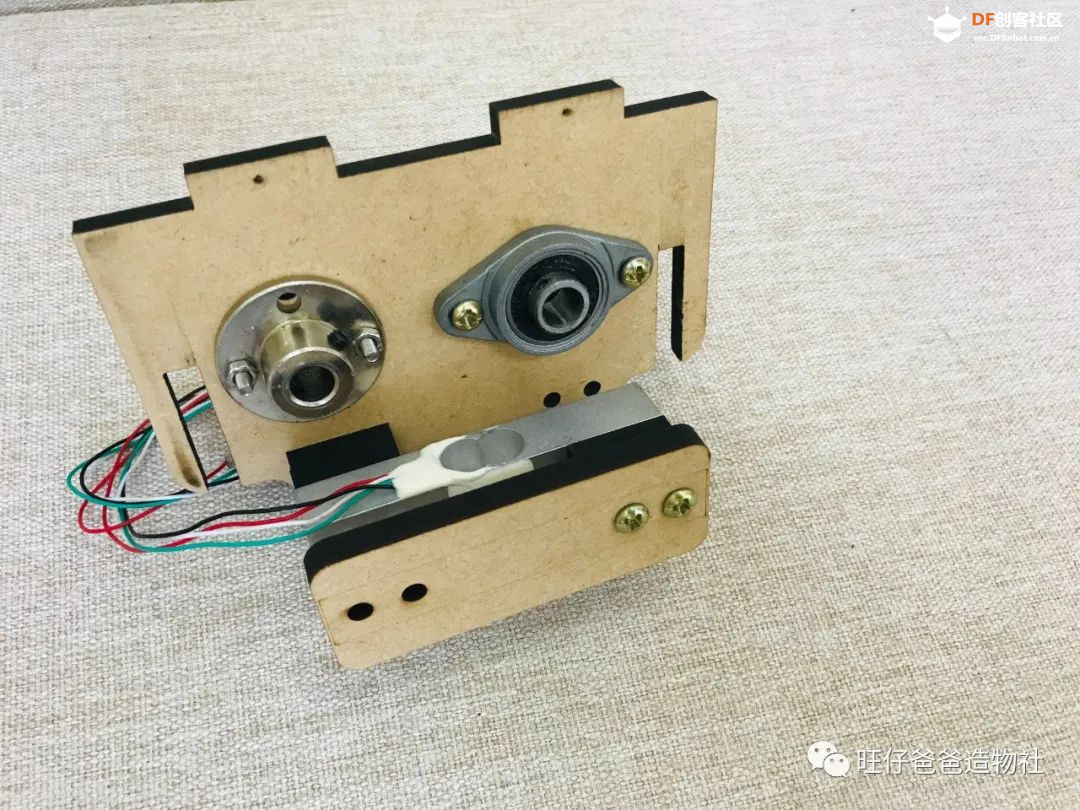 图 24重量传感器安装在竖板中 之后将两块竖板安装在底板上,如下图25所示 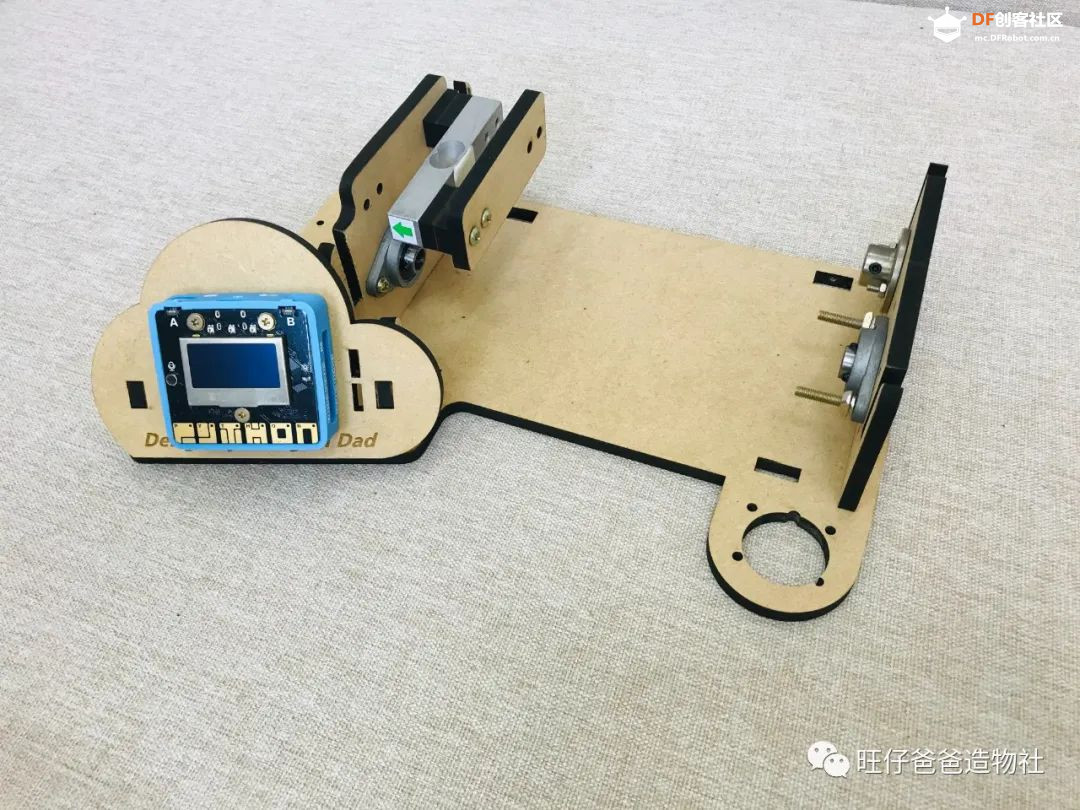 图 25竖板安装在底板上 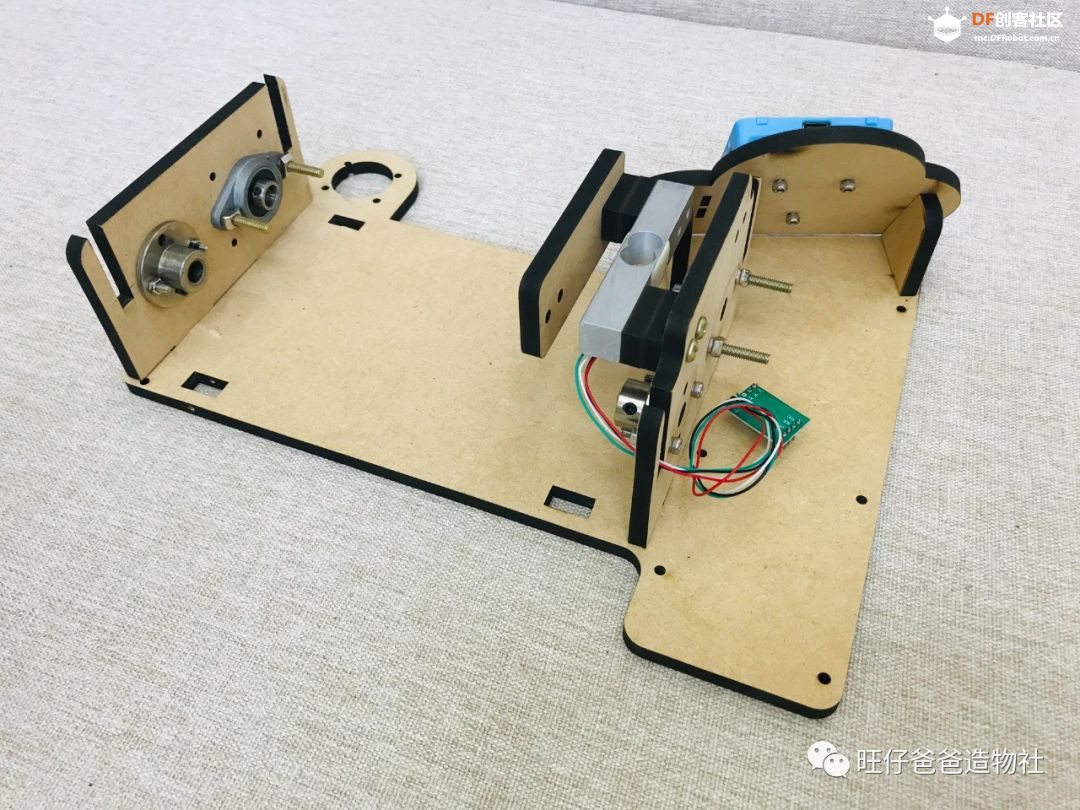 图 26竖板安装在底板上的背面图 第五步,安装T8丝杆法兰、直线运动轴承和四方转接座,所需零件如下图27所示  图 27安装丝杆法兰、运动轴承及转接座所需零件 直线运动轴承使用直径3mm长度50mm的螺丝固定,四方转接座使用直径4mm长度40mm的螺丝固定,固定完成如图28  图 28使用螺丝组装零件 第六步,安装丝杆、光轴、手轮以及第五步安装完成的模块,如图29 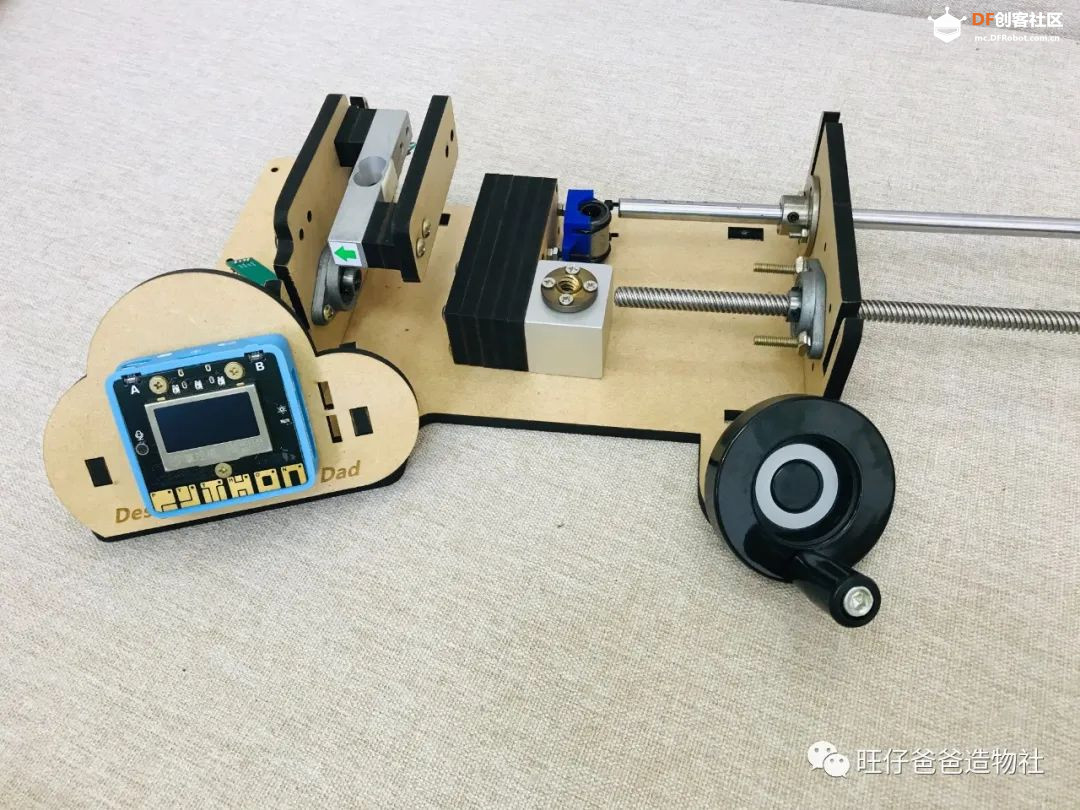 图 29准备安装丝杆、光轴及手轮 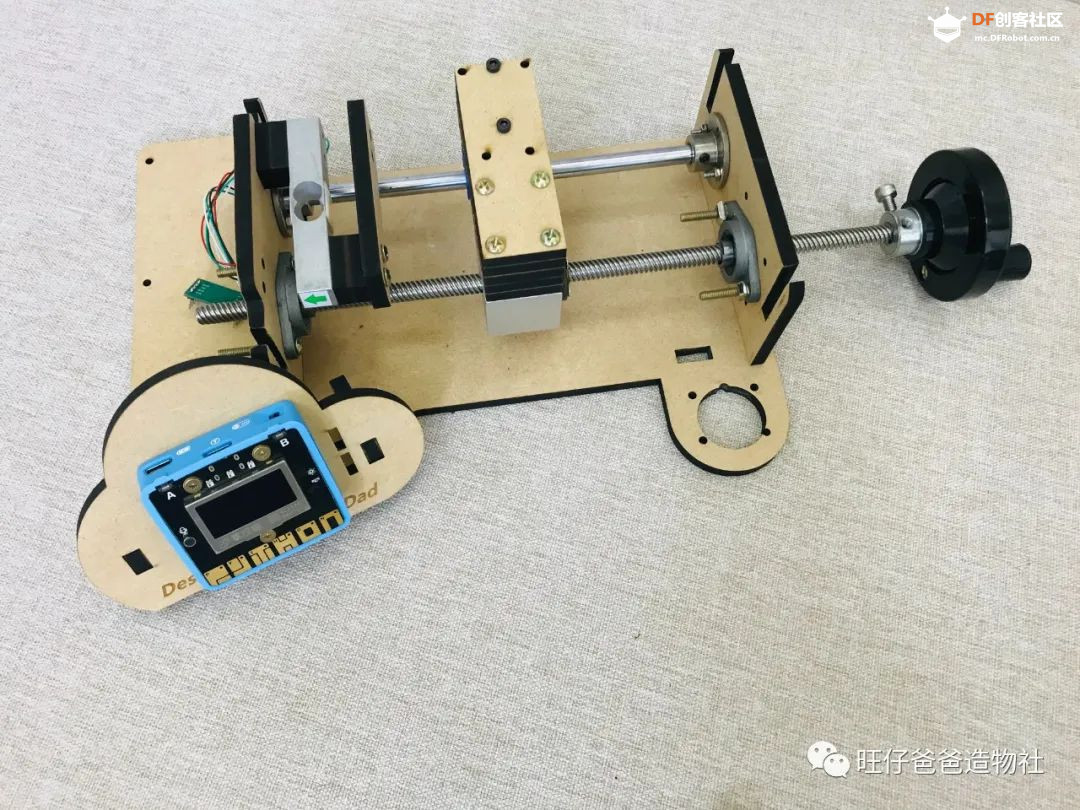 图 30丝杆、光轴、手轮安装完成 图 31效果图 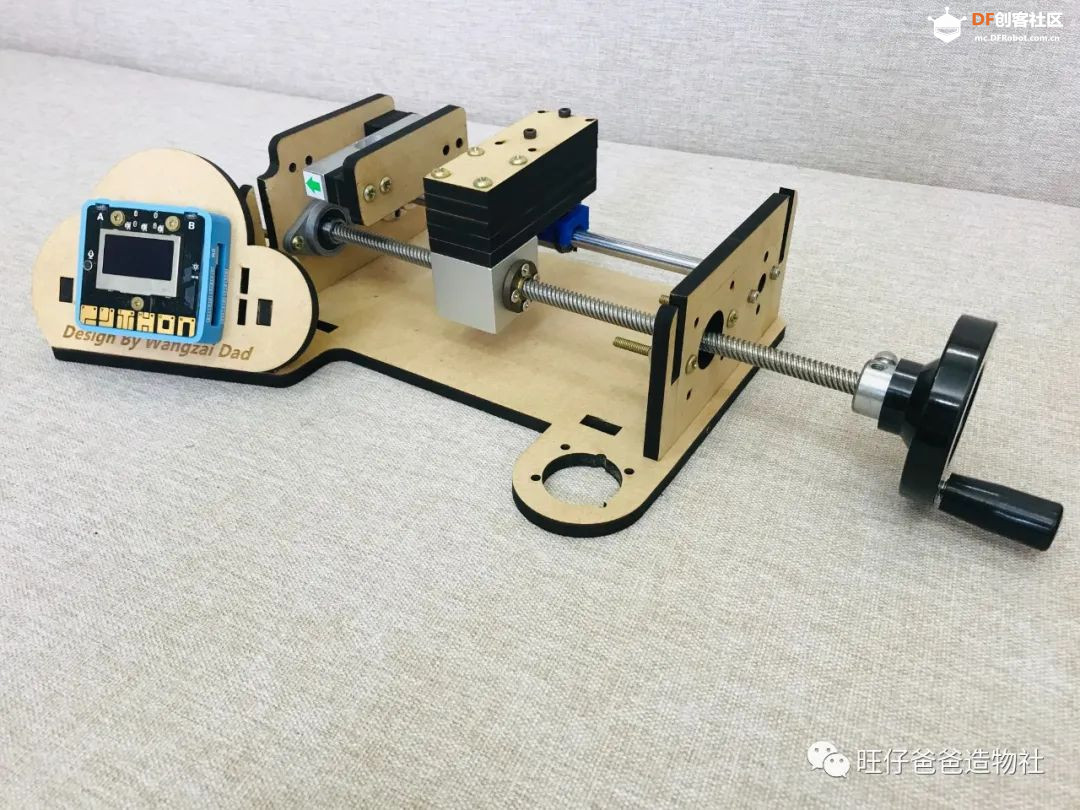 图 32 最后,将四块三角形的竖板安装固定起来如图33,紧接着连接电路组装就完成了  图 33安装三角形的竖板进一步加固结构 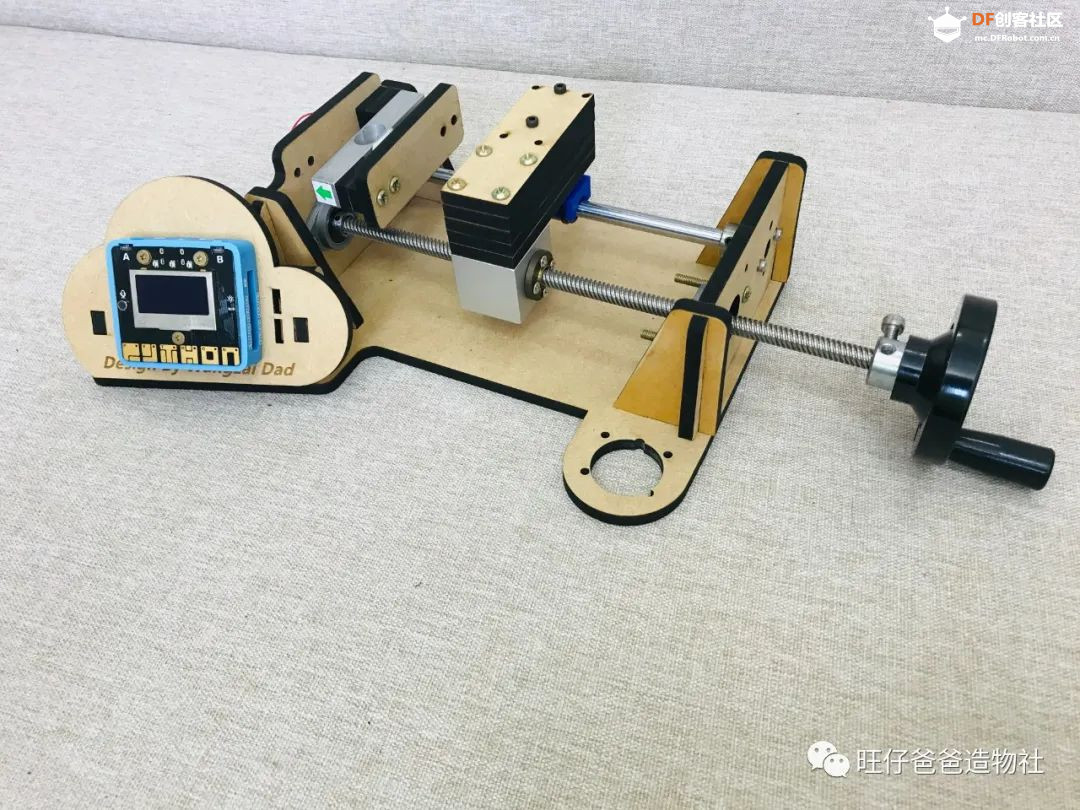 图 34三角形竖板安装完成 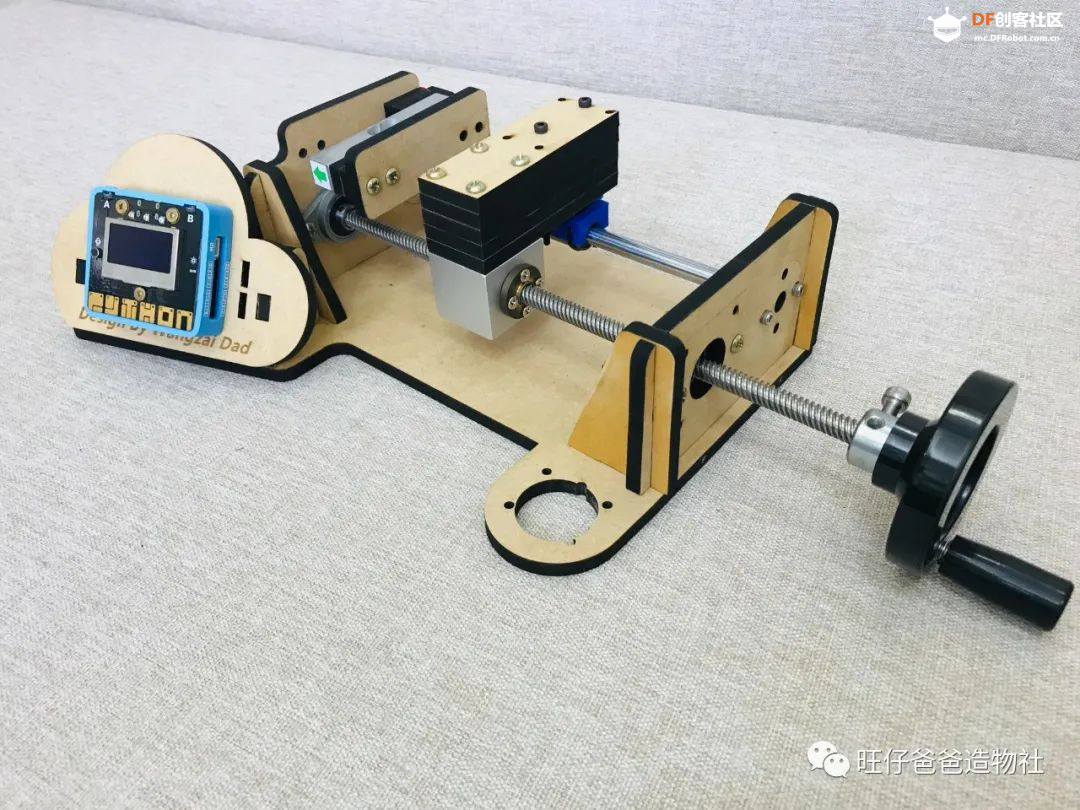 图 35 正面图 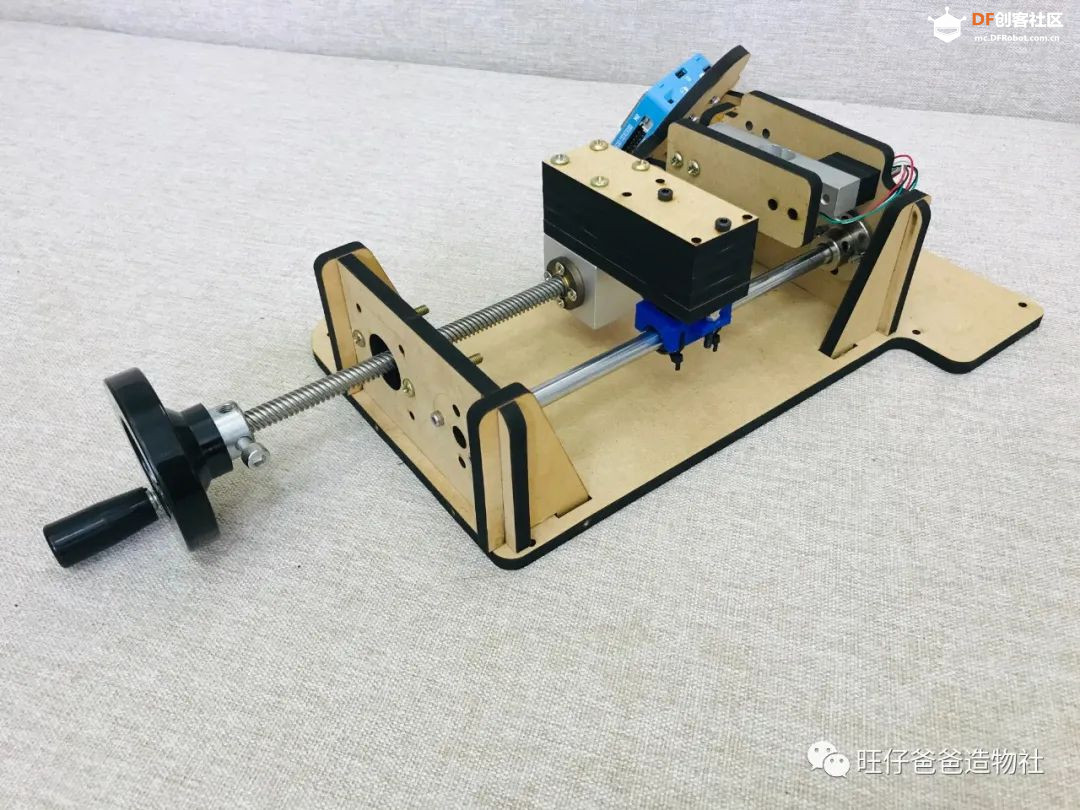 图 36 背面图  图 37 背面图 #程序设计# 本次作品我们使用Mixly图形化编程环境来编写程序,Mixly编程软件可以在Mixly.org官网下载 软件下载完成后,打开Mixly软件,右下方选择Arduino HandBit主控板 接着在传感器模块中选择HX711称重传感器如图38,设置引脚为P0和P1 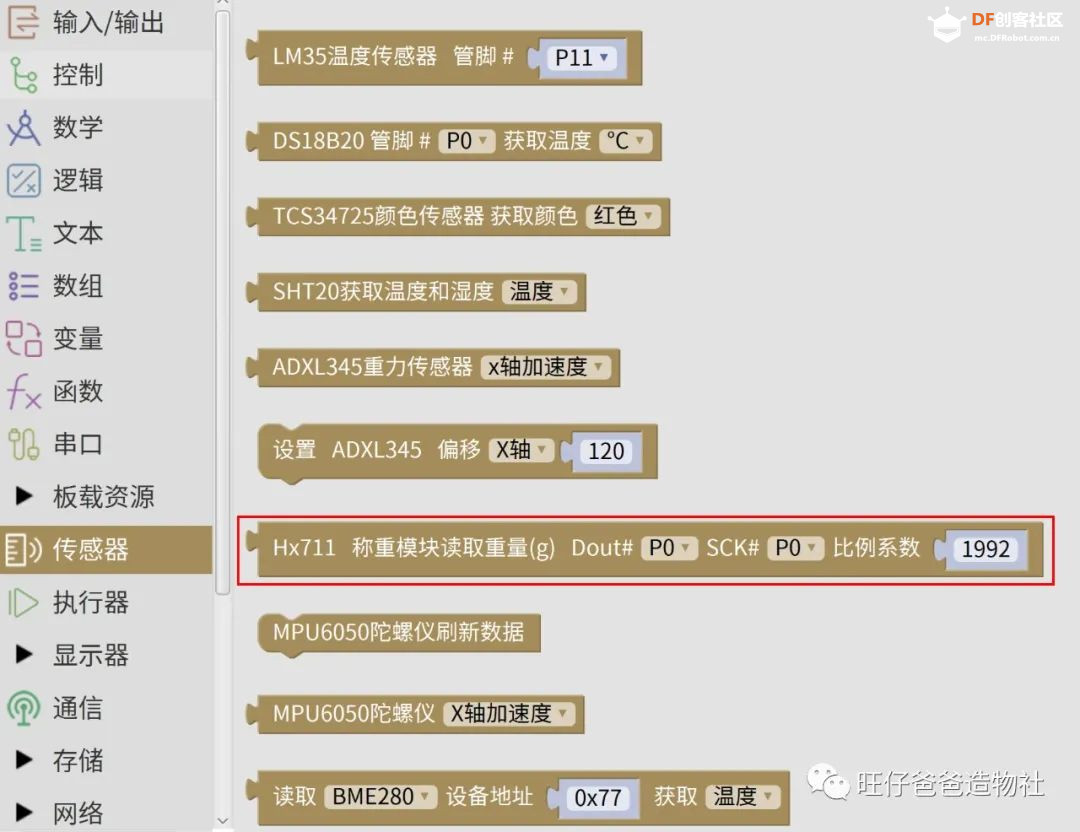 图 38选择Hx711称重传感器 然后我们编写如下图39所示程序测量称重传感器的数据  图 39测量称重传感器数据 程序下载后,点击Mixly软件右下方的串口监视器,用手按压称重传感器查看测试结果,结果如图40 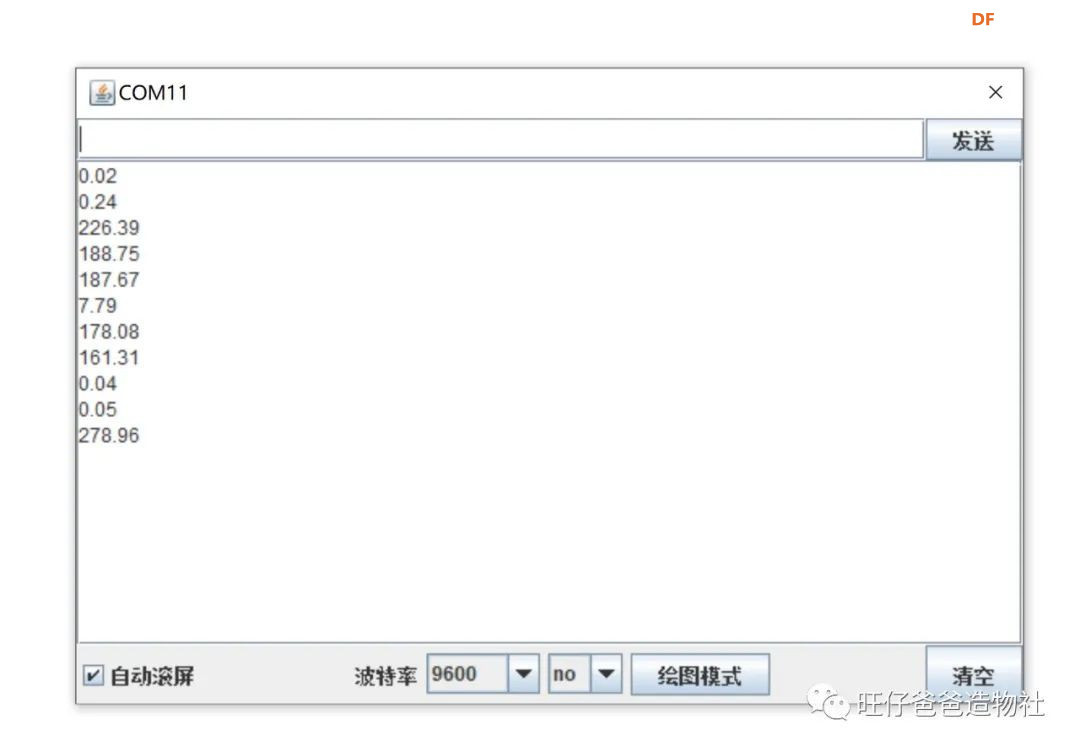 图 40串口监视器打印称重传感器数据 当上述程序成功运行,意味着称重传感器已经可以为我们所用了 接着,我们还可以使用板载显示模块修改程序,将称重传感器测量的数据显示在屏幕中,显示程序块如图41 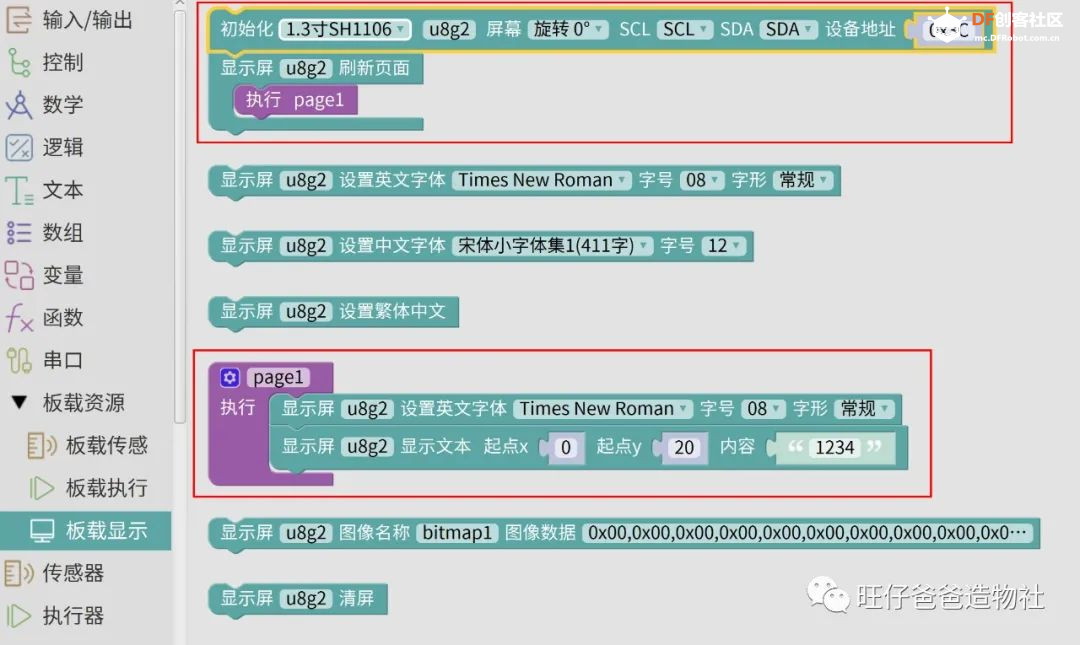 图 41显示程序块 将称重传感器检测到的数据显示在掌控板的屏幕中的程序如图42,这里我们使用一个小数类型的变量“POWER”用来存放读取到的重量数据  图 42称重传感器数据显示在掌控板屏幕中程序 程序下载后,显示效果如图43 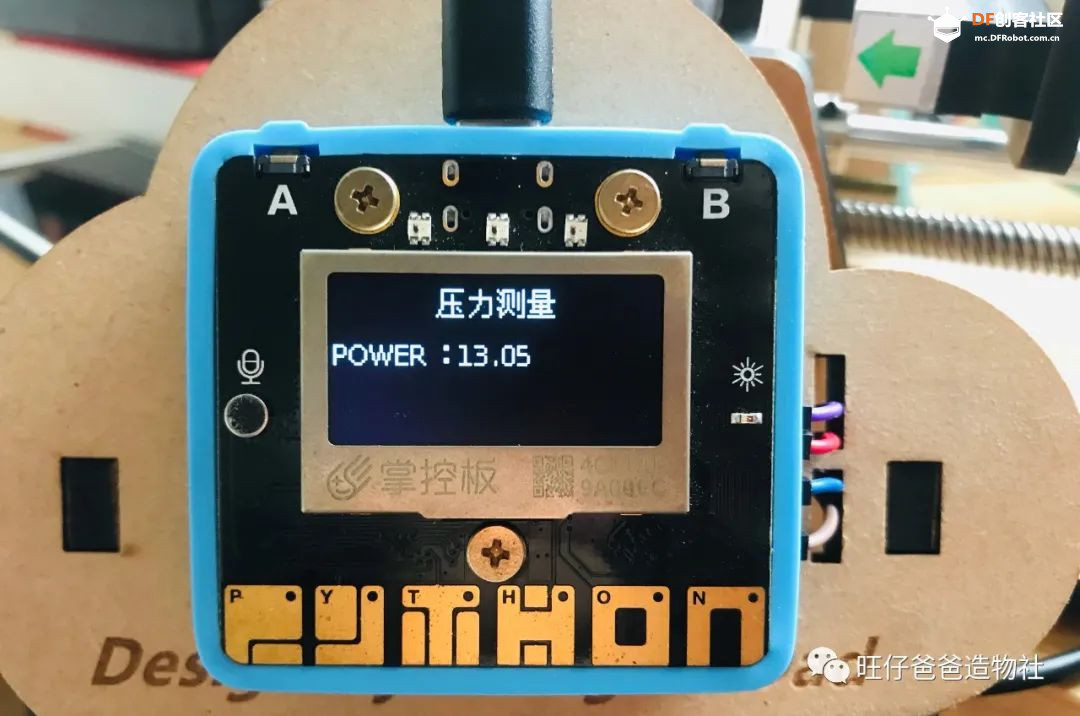 图 43称重传感器数据在屏幕中显示 为了提高程序的运行效率,我们还可以增加一个简单定时器模块,每隔3秒测量一次数据,修改后的程序如下图44 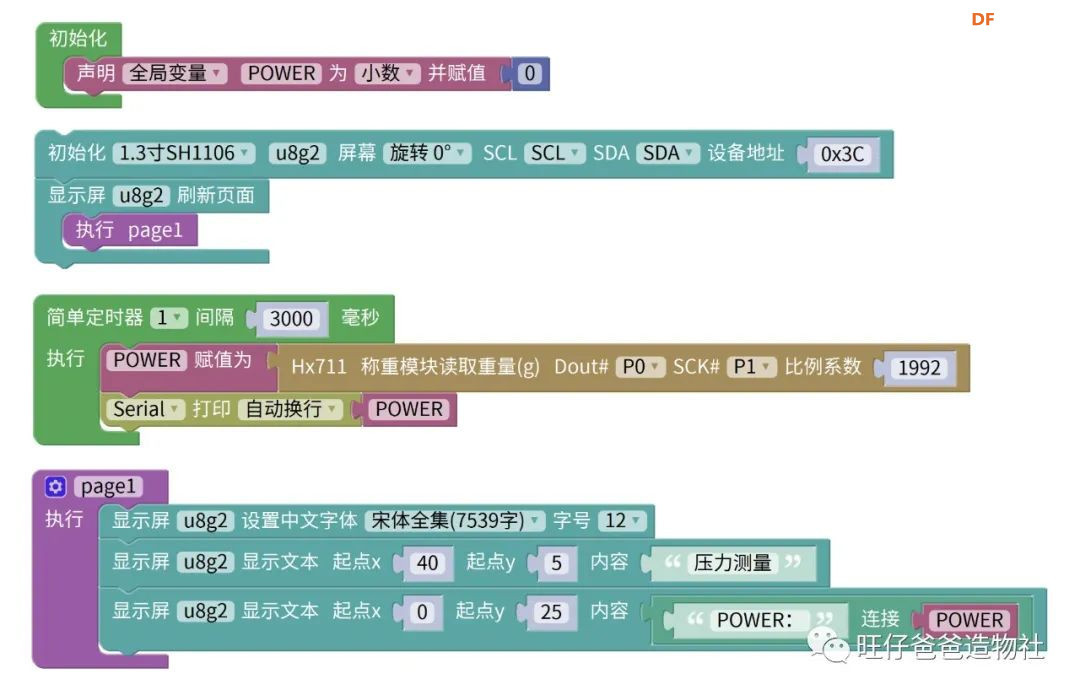 图 44使用简单定时器每隔3秒测量一次数据 到目前为止,我们已经实现了实时检测重量数据了,但只是实时检测并不能满足需求,如果能及时将测量的数据保存下来会更加方便开展科学探究实验。 于是我们还可以增加一个数组将检测的数据保存在数组中,设置数组的方式如图45 其中数组的项目数可以按下面的方式自由增加 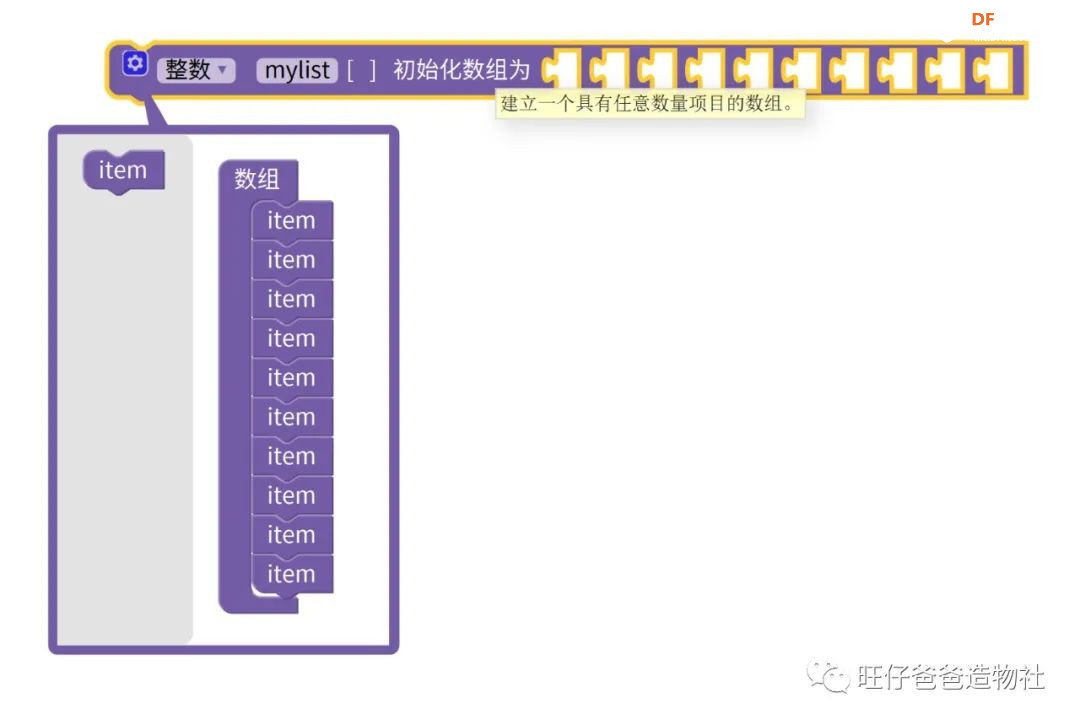 图 45增加数组程序块 之后我们在原来的程序基础上进行修改,将测量到的重量数据加入的数组中,程序如图46,其中整数型变量“count”用来作为数组的项目序号 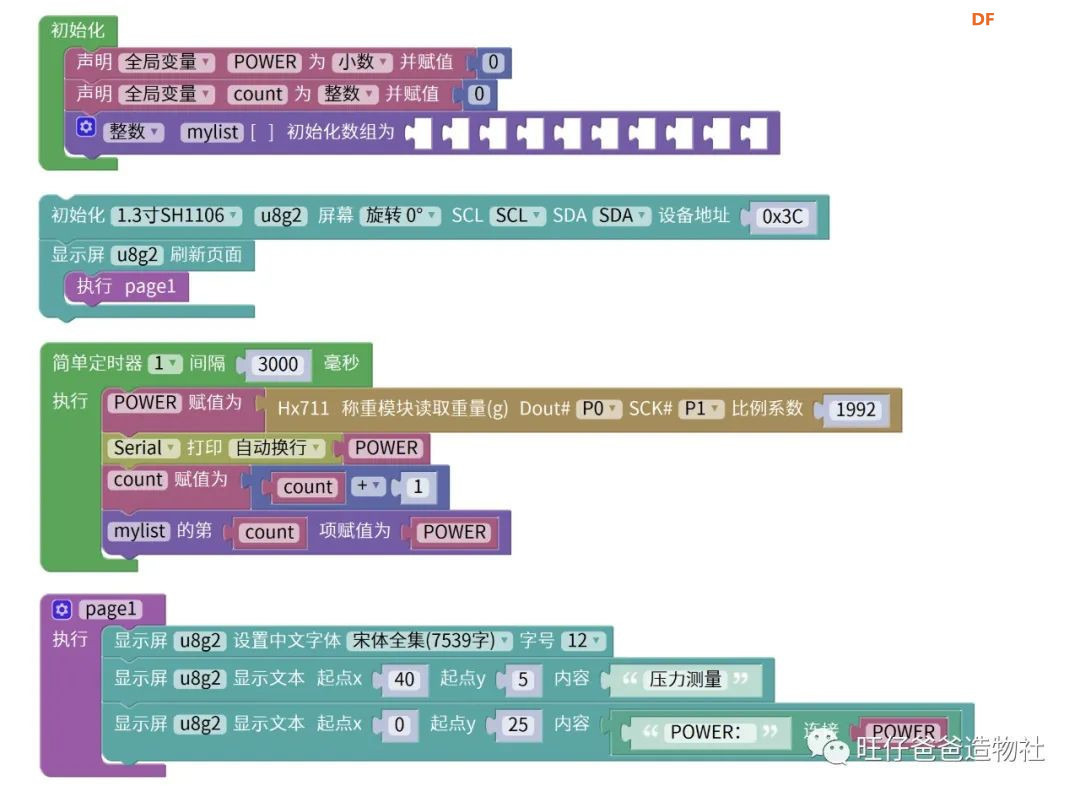 图 46将测量到的数据保存在数组中 通过运行程序,我们会发现,即便是每隔3秒测量一次数据,但很快数组存放的数据就满了,有的朋友可能会想到,我们可以增加数组的项目数,没错,这种方法是可以的,除此之外还有没有其他办法呢 其实我们可以在程序中设置当在掌控板板载的A键被按下时开始测量数据,当A键再次按下时停止测量数据,这样测量数据就是可控的,而不是掌控板一上电就开始测量 于是我们在程序中使用一个整数类型的变量“flag”作为判断依据,A键每按下一次变量“flag”的数值加1,通过判断变量“flag”的奇偶性来决定是否开始测量数据,修改后的程序如图47 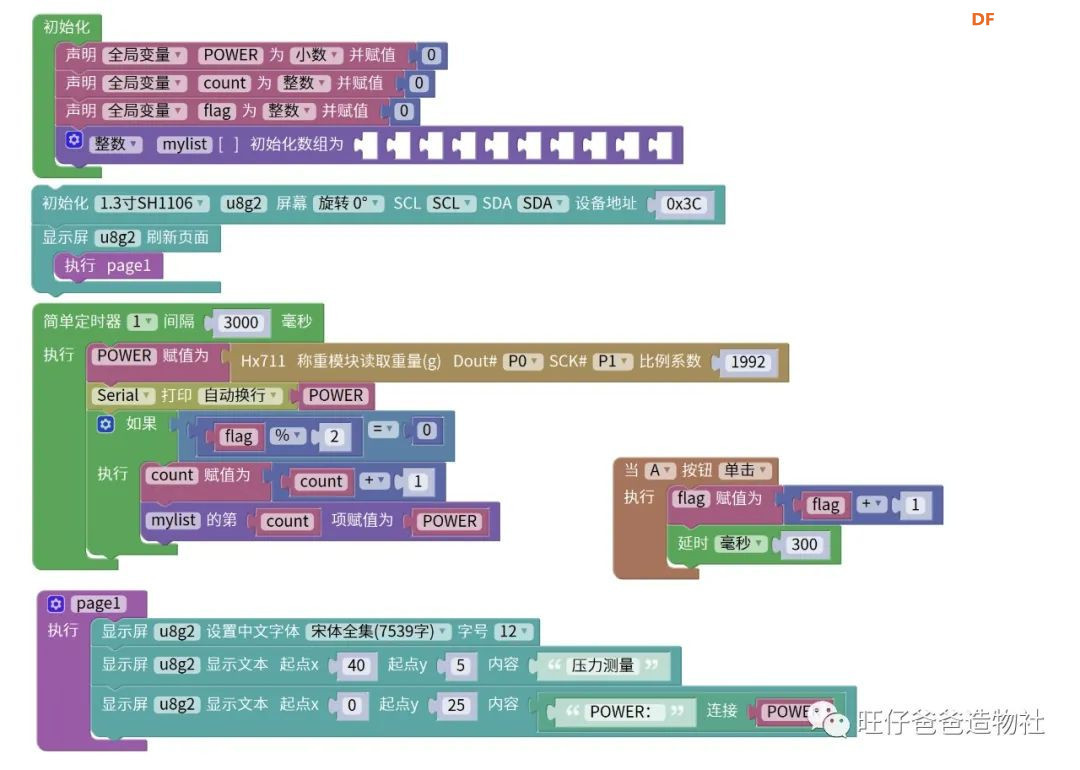 图 47设置单击开始或结束测量数据的程序 为了显示的效果更加明显我们还可以加入一个显示状态的字符串变量“status”,修改后的程序如图48 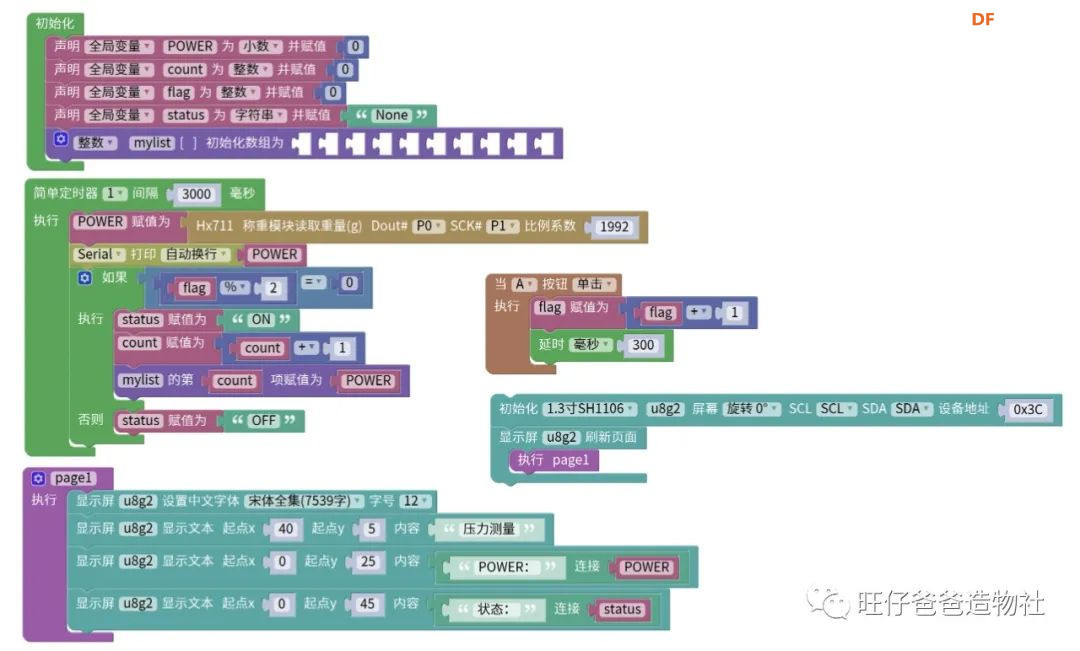 图 48在程序中增加状态显示 程序运行后的结果如图49  图 49增加状态变量程序运行后的显示结果 其实,我们不仅可以把数据保存在数组中,我们还可以将数据发送到串口监视器直观的显示出来 同样的,我们设置当掌控板板载的B键被按下时将测量到的数据发送到串口监视器显示出来,程序如图50 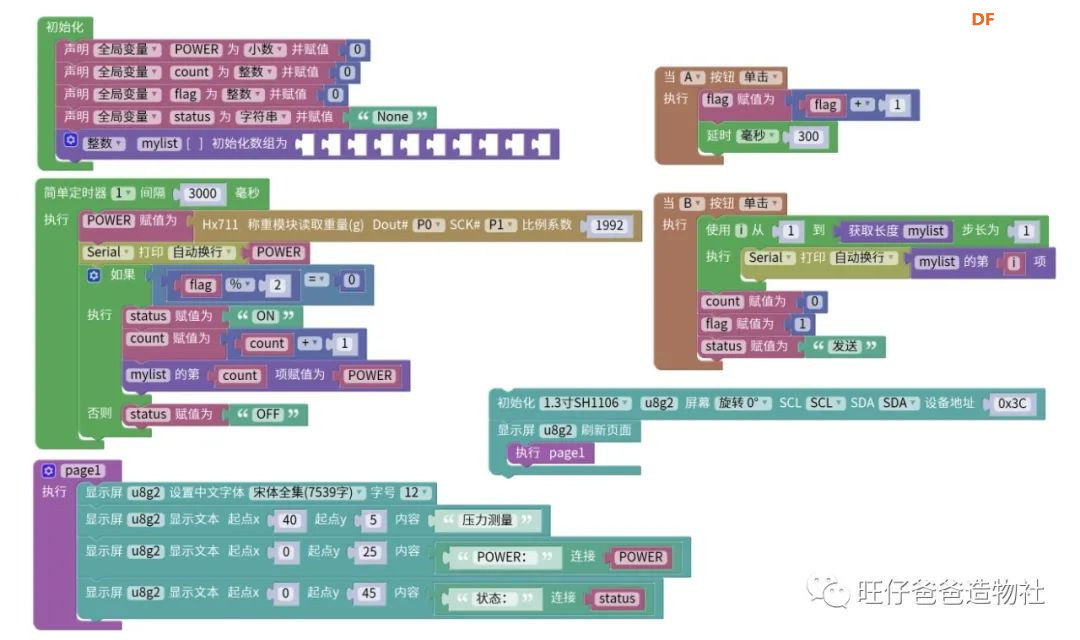 图 50掌控板B键按下将数据发送到串口监视器并显示 打开串口监视器的绘图模式,当按下B键时即可看到如下图51的效果 其中最大值、最小值可以根据实际情况设定 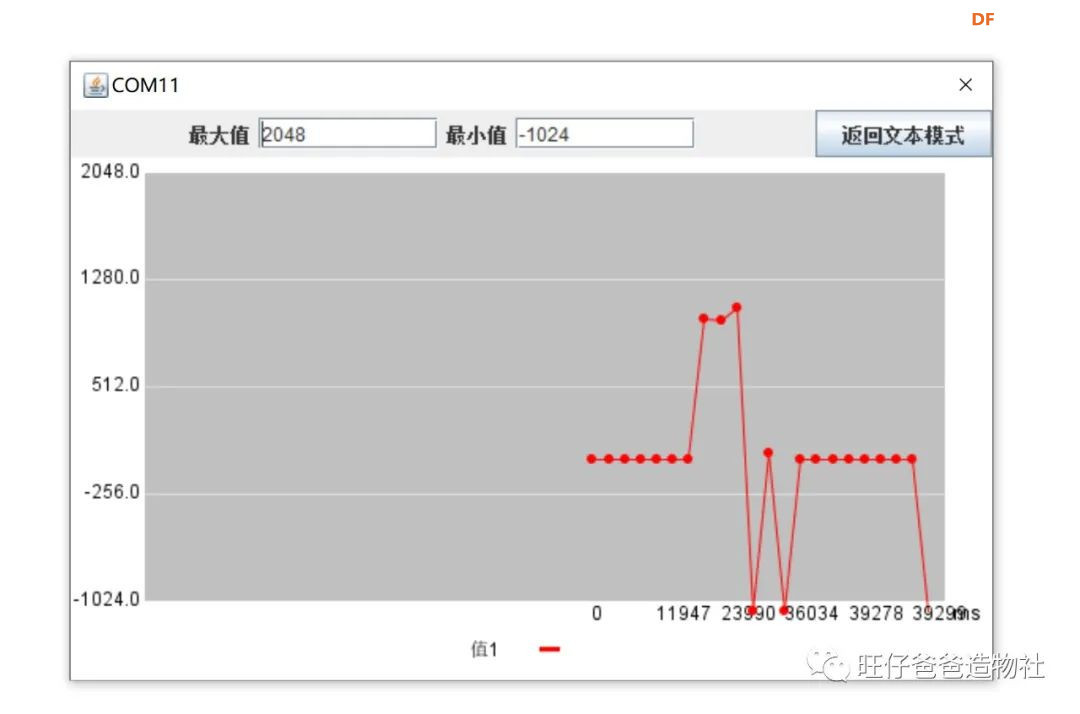 图 51串口监视器显示测量数据并绘制图表 除此之外,如果我们要实现多次测量,还可以加入数据清空功能 设置掌控板板载的触摸P键被触摸时清空数据,程序如图52  图 52增加清空数据的程序 有的伙伴会问,只是把数据发送到串口监视只能测量一种物体的压力,要测量不同物体的数据,并实现数据保存该怎么办呢? 其实,我们还可修改程序,将数据保存到SIoT物联网平台,这样就可以测量多种物体的实验数据,并将测试数据永久保存下来,程序修改如下图53 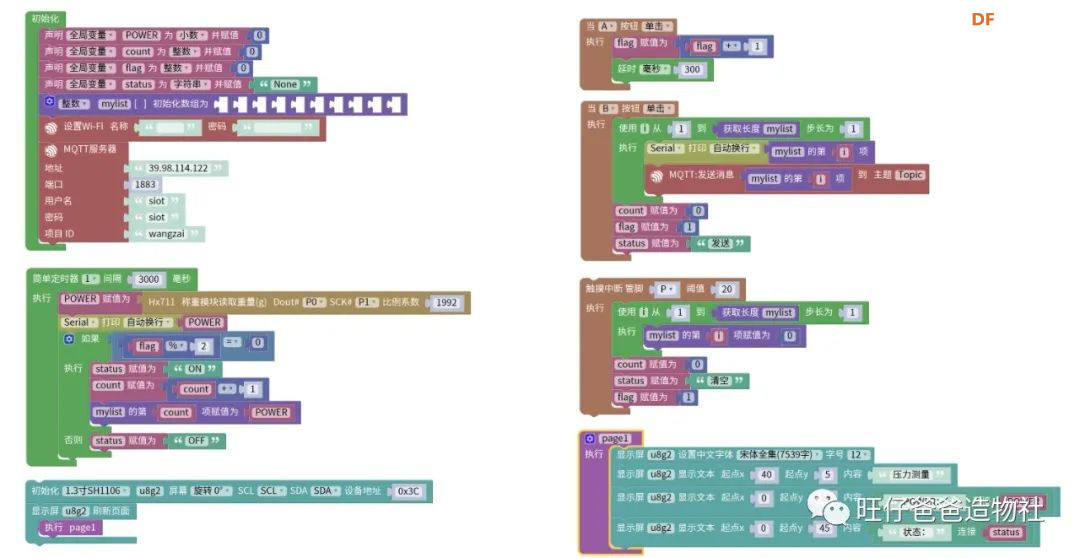 图 53将测量数据发送至SIoT物联网平台 运行程序,接着在电脑浏览器输入网址:39.98.114.122:8082即可看到如图54所示界面,然后按照提示输入账户信息,登录SToT物联网平台 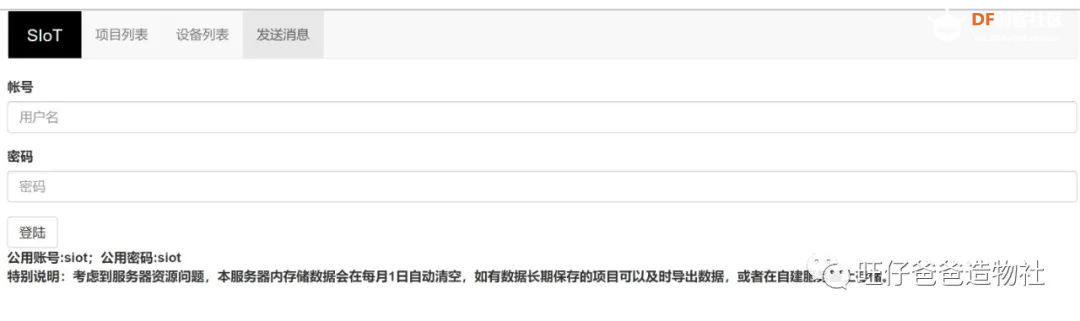 图 54 登录成功,我们点击设备列表,输入项目ID查看数据,数据如图54 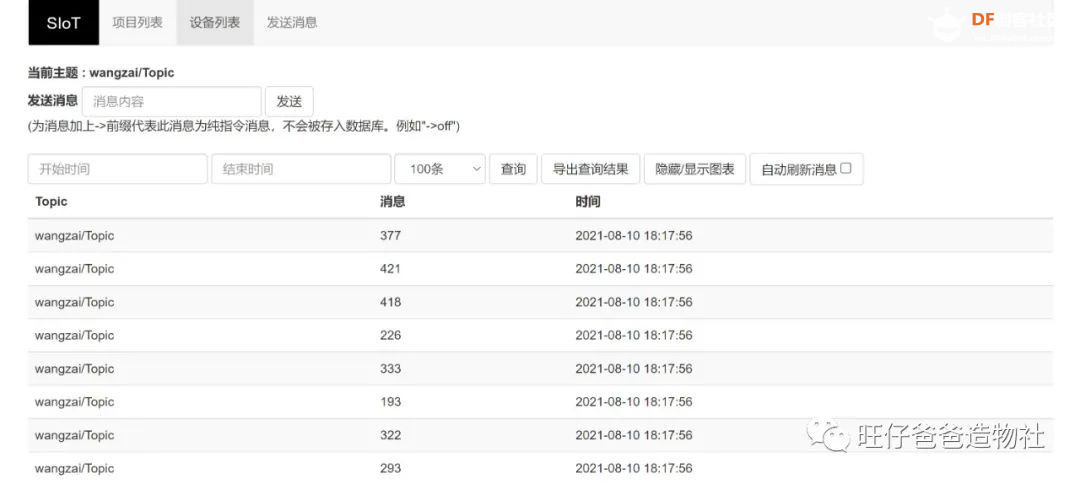 图 55在SIoT物联网平台接收到的数据 知识点 什么是SIoT? SIoT为“虚谷物联”项目的核心软件,是为了帮助中小学生理解物联网原理,并且能够基于物联网技术开发各种创意应用而开发设计跨平台、开源MQTT服务器程序。S指科学(Science)、简单(Simple)的意思。SIoT重点关注物联网数据的收集和导出,是采集科学数据的最好选择之一 #实验活动# 实验一: 测量打开核桃壳需要的力量 实验方法:
实验过程: 按照制定的实验方法,将核桃放入实验装置测试,如图56 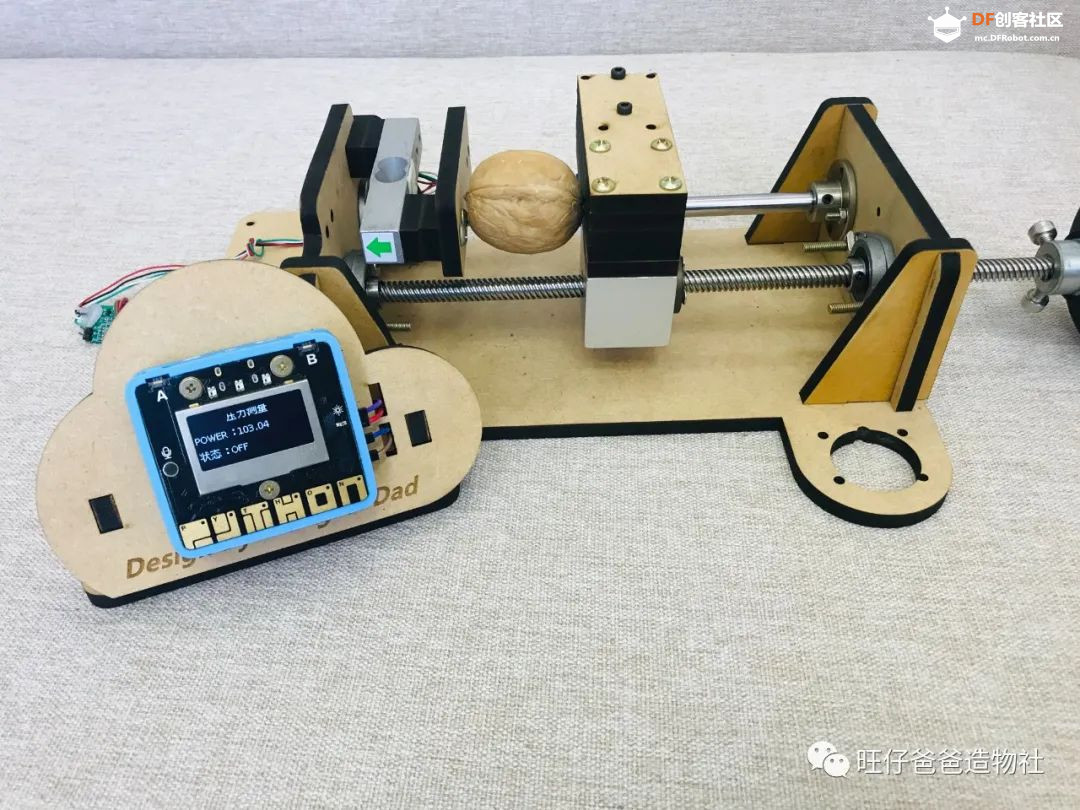 图 56测量打开核桃壳的力量 将实验数据记录在图表中,如图57和图58  图 57测量打开核桃壳力量的数据统计表  图 58测量打开核桃壳力量的数据折线图 实验结果分析: 通过对测量统计的数据进行分析、比较,我们可以看出打开核桃的力量成线性变化,在打开之前成上升趋势,打开后线性下降,最值是1333.96 实验二: 测量打开花生壳需要的力量 实验方法:
实验过程: 按照制定的实验方法,将花生放入实验装置测试,如图59 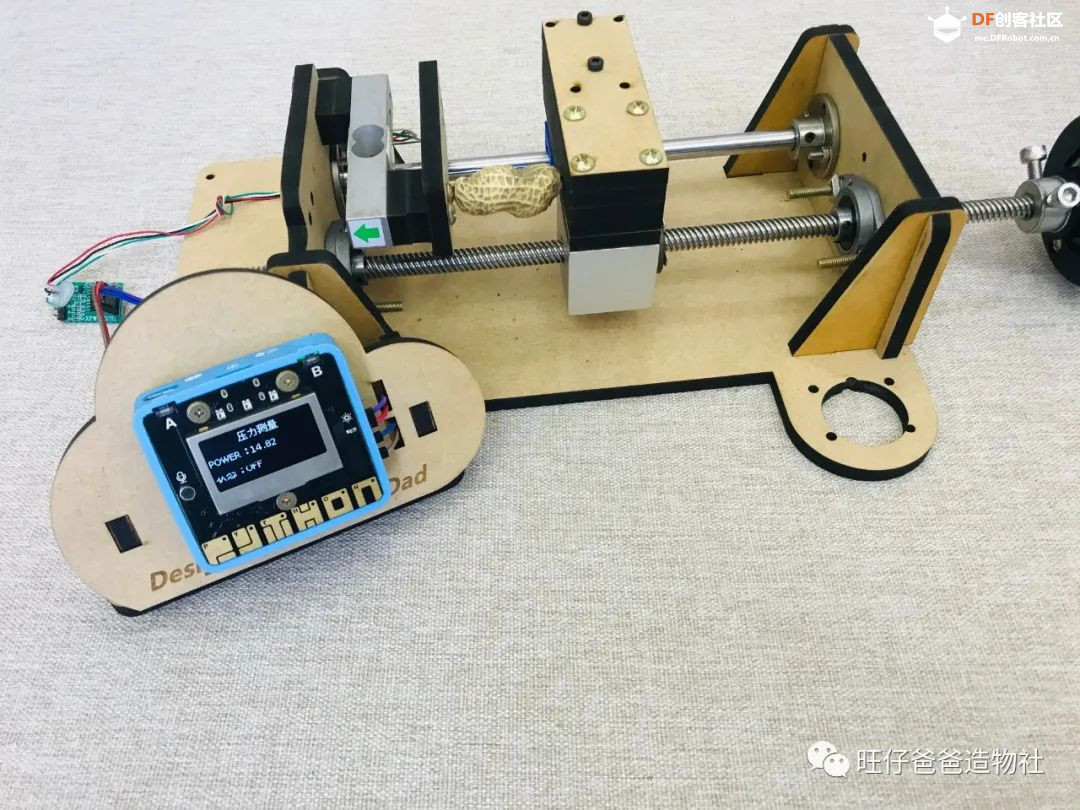 图 59测量打开花生壳的力量 将实验数据记录在图表中,如图60和图61  图 60测量打开花生壳力量的数据统计表  图 61测量打开核花生壳力量的数据折线图 实验结果分析: 通过对测量到的数据进行分析、比较,我们可以看出打开花生的力量成线性变化,在打开之前成上升趋势,打开后线性下降,最值是645.24 实验三: 测量打开巴旦木壳需要的力量 实验方法:
实验过程: 按照制定的实验方法,将巴旦木放入实验装置测试,如图62 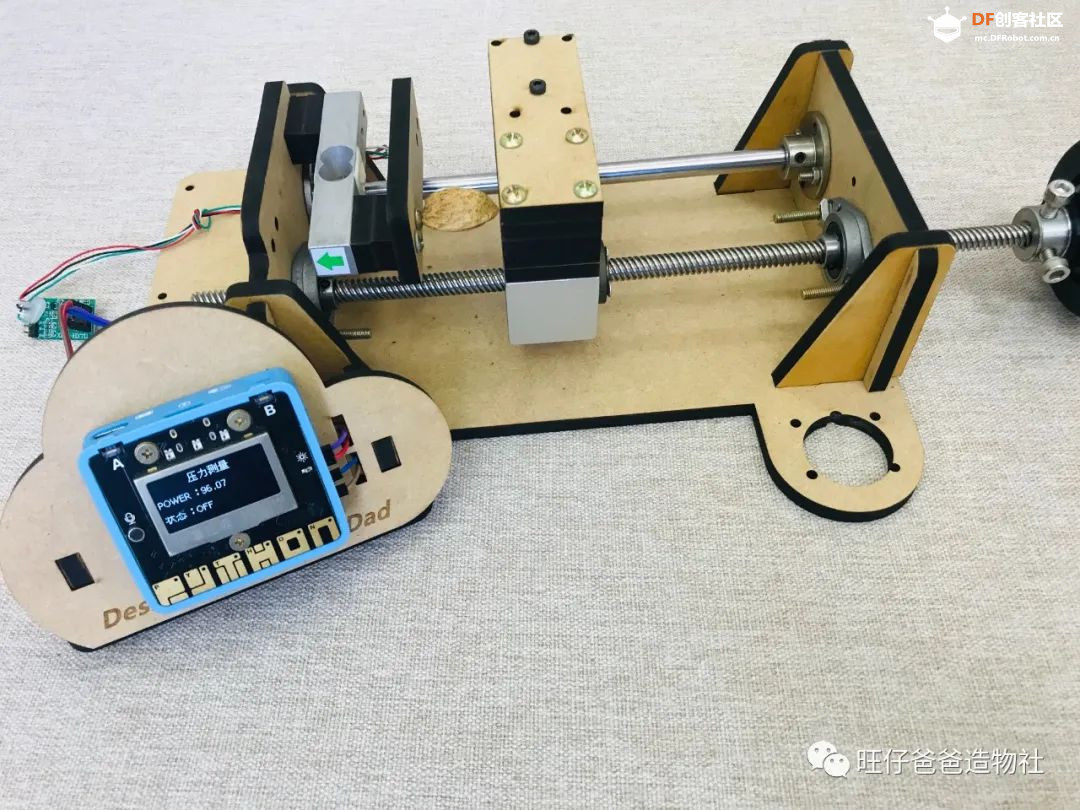 图 62测量打开巴旦木壳的力量 将实验数据记录在图表中,如图63和图64  图 63测量打开巴旦木壳力量的数据统计表 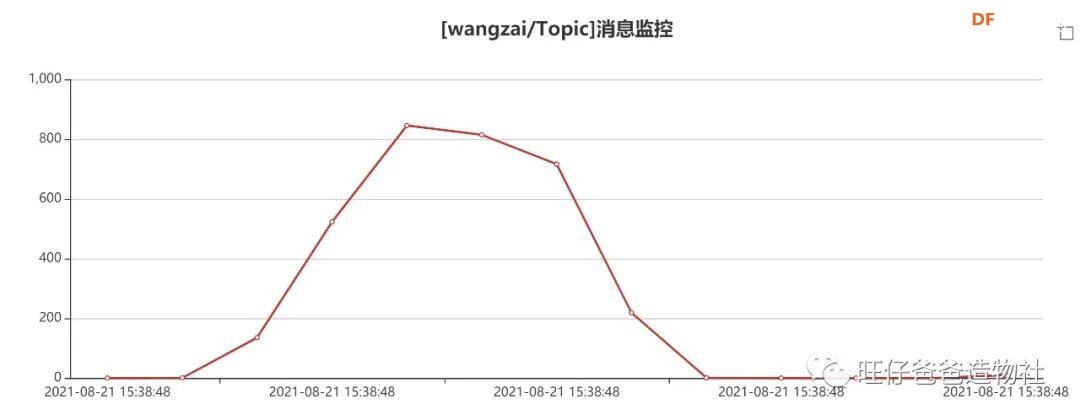 图 64测量打开巴旦木壳力量的数据折线图 实验结果分析: 通过对测量到的数据进行分析、比较,我们可以看出打开巴旦木壳的力量成线性变化,在打开之前成上升趋势,打开后线性下降,最值是845.58 通过比较打开三种不同坚果壳的测量数据发现,核桃壳最硬,需要的力量也最大,打开花生壳需要的力量最小,在实验过程中还需要注意实验步骤要规范,将人为操作不规范的影响因素降到最低,同时还要学会观察总结实验数据,选取有效数据进行分析,养成严谨的科学实验态度 #总结与思考# 至此为止,我们本次的科学探究实验就完成了,我们学会了Hx711重量传感器的使用方法,掌控板定时器、物联网功能的编程方法 做完这三个实验,我们确实把打开坚果壳的力量进行了量化,但不免还是会思考,我们预期的目标达成了吗? 重量传感器在水平状态下秤得物体的重量单位为克(g),从牛顿力学我们知道质量为1Kg的物体所受的重力大概是9.8N(牛) 公式为G=mg,其中G为重力,m为质量(重量),g为重力加速度,g是一个常数9.8N/kg,也就是说如果我们通过重量传感器知道一个物体的重量,通过公式是可以计算出重力的 不同的是,我们这次将重量传感器横向安装,这样测出来的数值单位是什么呢?还是重量吗?假设是重量,如何换算成力量呢,由于受力方向不同,显然不能简单的与重力加速度g相乘,那是不是可以将装置竖向摆放,重新测量数据验证结果呢?旺仔爸爸确实这样做了,下面是竖向安装的测试结果  图 65竖向测量打开核桃壳的力量  图 66竖向测量打开核桃壳的力量数据表 这样的结果是我们想要的数据吗?竖向测量的结果和横向测量的结果有哪些不同呢?竖向测量时除了重力外会不会有其它力影响?除此之外还有没有其他方法可以实现我们的预期目标呢? 做完实验,旺仔爸爸陷入了思考,不知你是否也有这样的疑问? 希望有兴趣的伙伴一起探讨、改进优化,造物让生活更美好,更多精彩内容欢迎关注旺仔爸爸公众号  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 荣誉教师
荣誉教师
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






