|
8683| 1
|
【虾米扩展板测评】03巡线小车 |
|
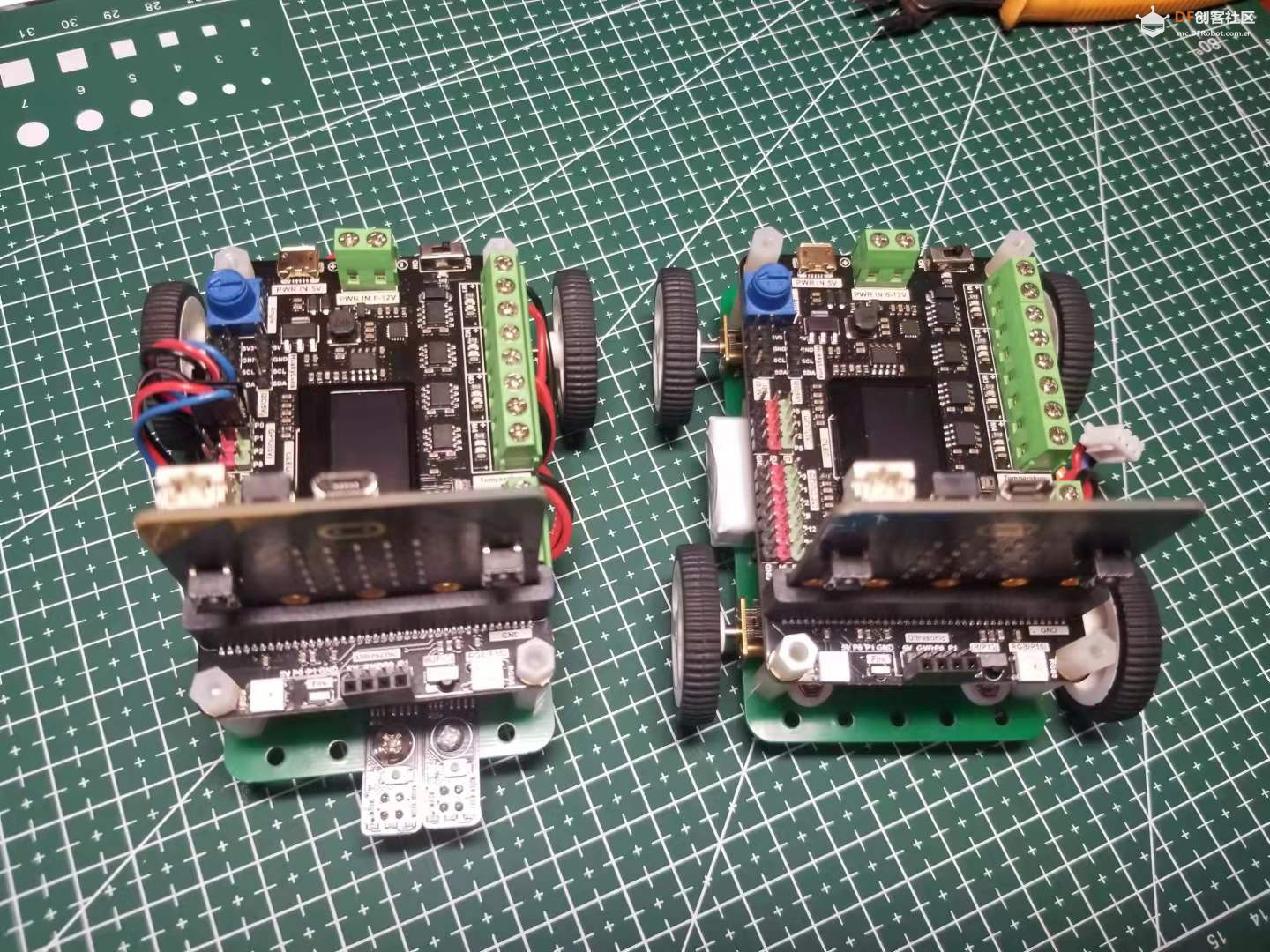
本帖最后由 网络白丁 于 2021-9-27 06:26 编辑 巡线小车是大家最常见的智能车,往往也有很多人学习智能小车、机器人也是从巡线小车起步的,虾米扩展板集成4路直流电机驱动,也许可以成为制作micro:bit小车的不二选择。之前已用虾米扩展板制作了辆4轮驱小车,见: 【虾米扩展板测评】02红外遥控小车 【制作过程】 在红外遥控小车的基础上减少两个N20电机,增加一个滑轮: 【9 d:/哈T6cdXJMWQdj哈 万向轮轮子滑轮底座滚珠式可粘贴脚轮转椅滚轮小车轮尼龙轮橡胶轮】 和2个Gravity: 智能灰度传感器 v1.0,小车搭建过程如图: 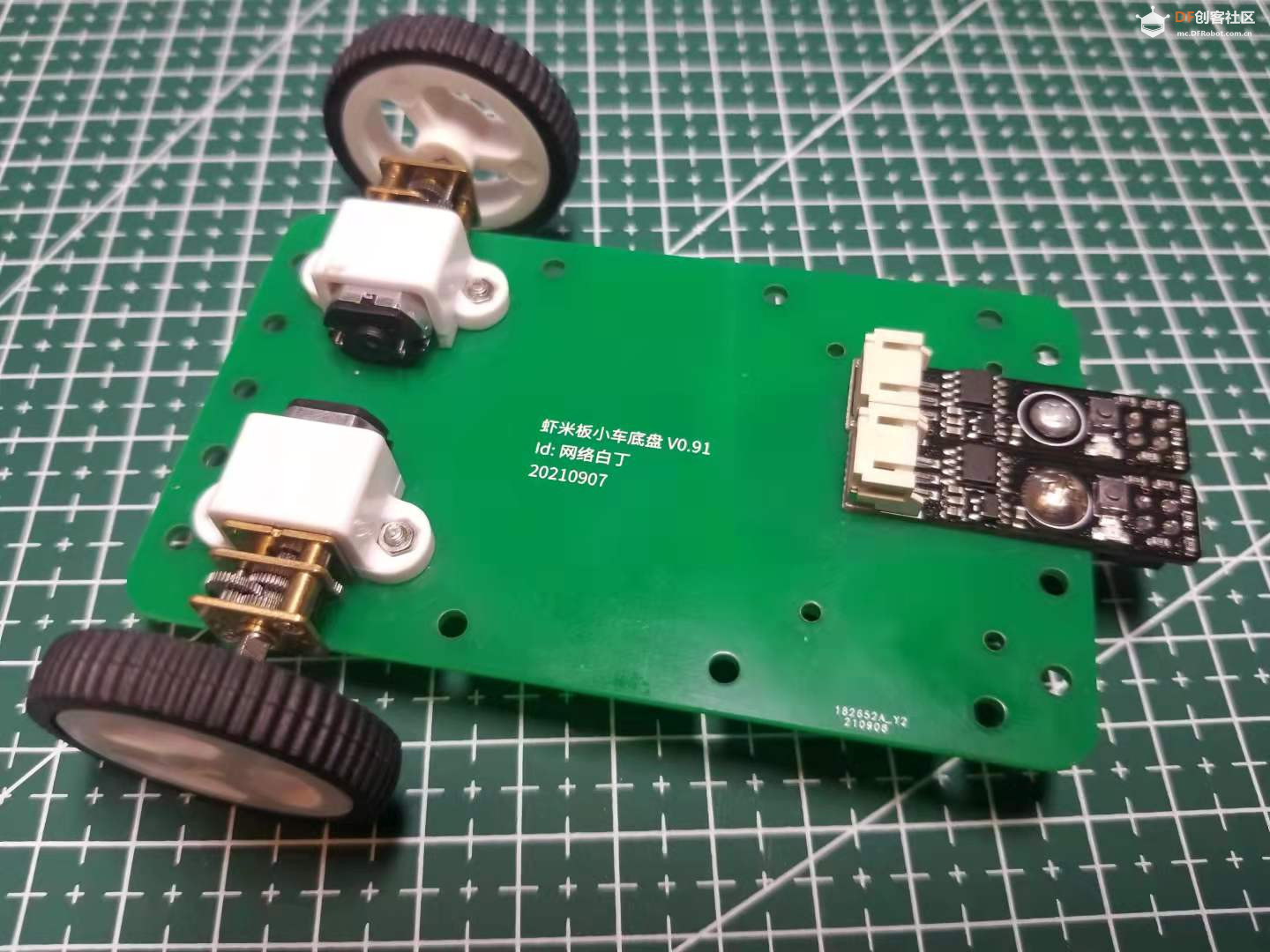  小滑轮用滑轮原配的双面胶粘在底板上 小滑轮用滑轮原配的双面胶粘在底板上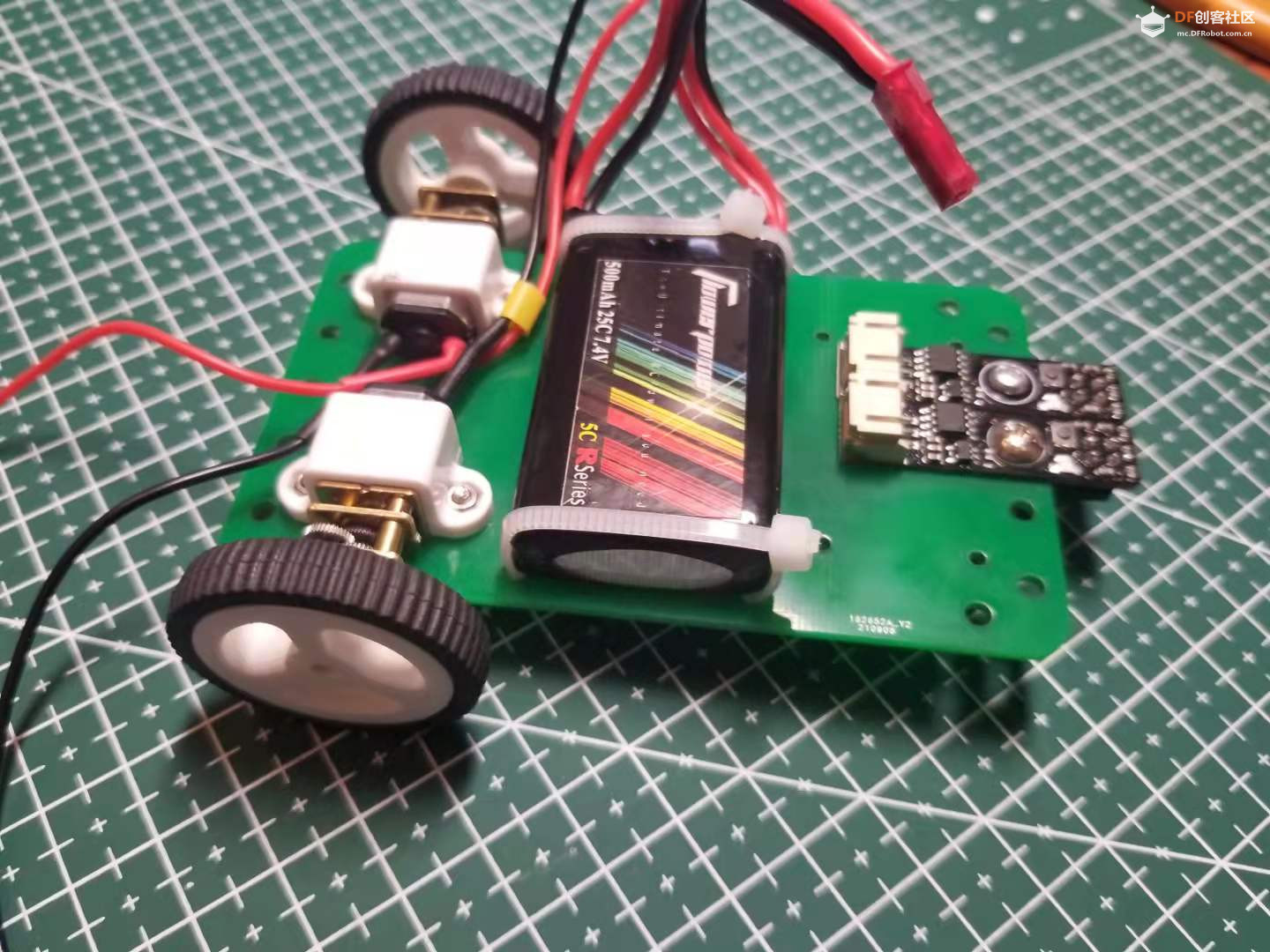 电机焊接电线,红线接“+”极 , 黑线接“-”极 2串锂电用扎带固定 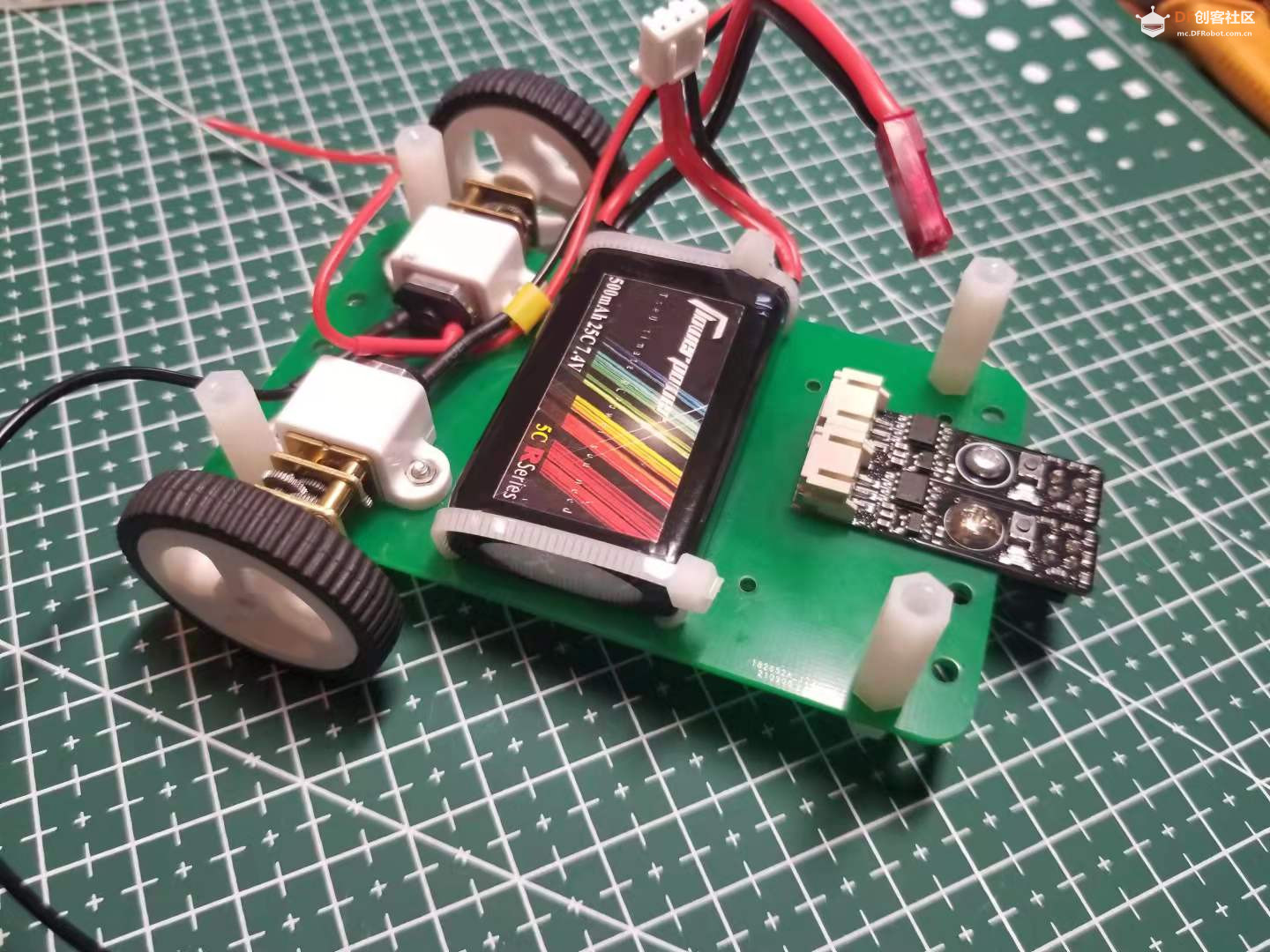 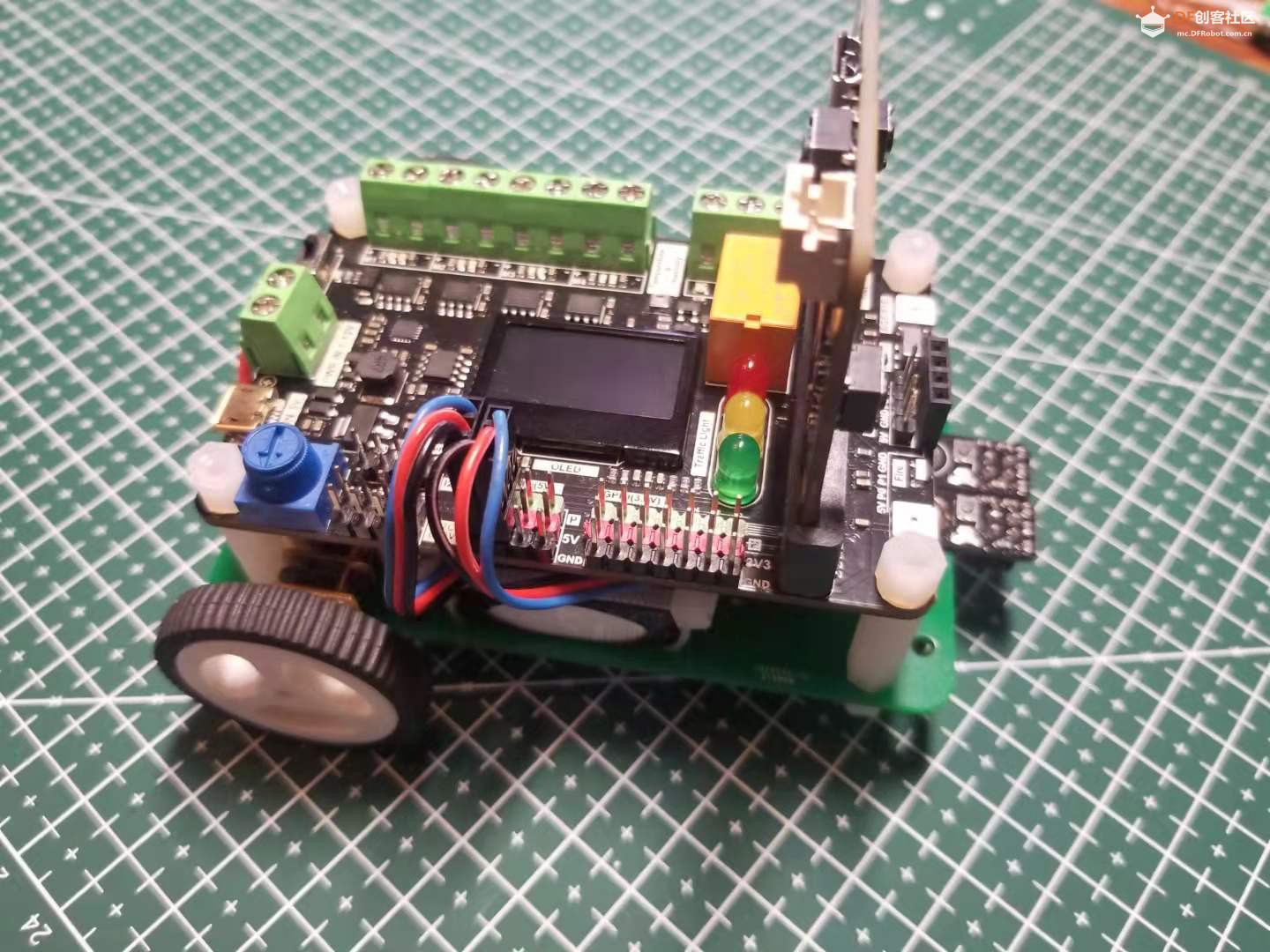 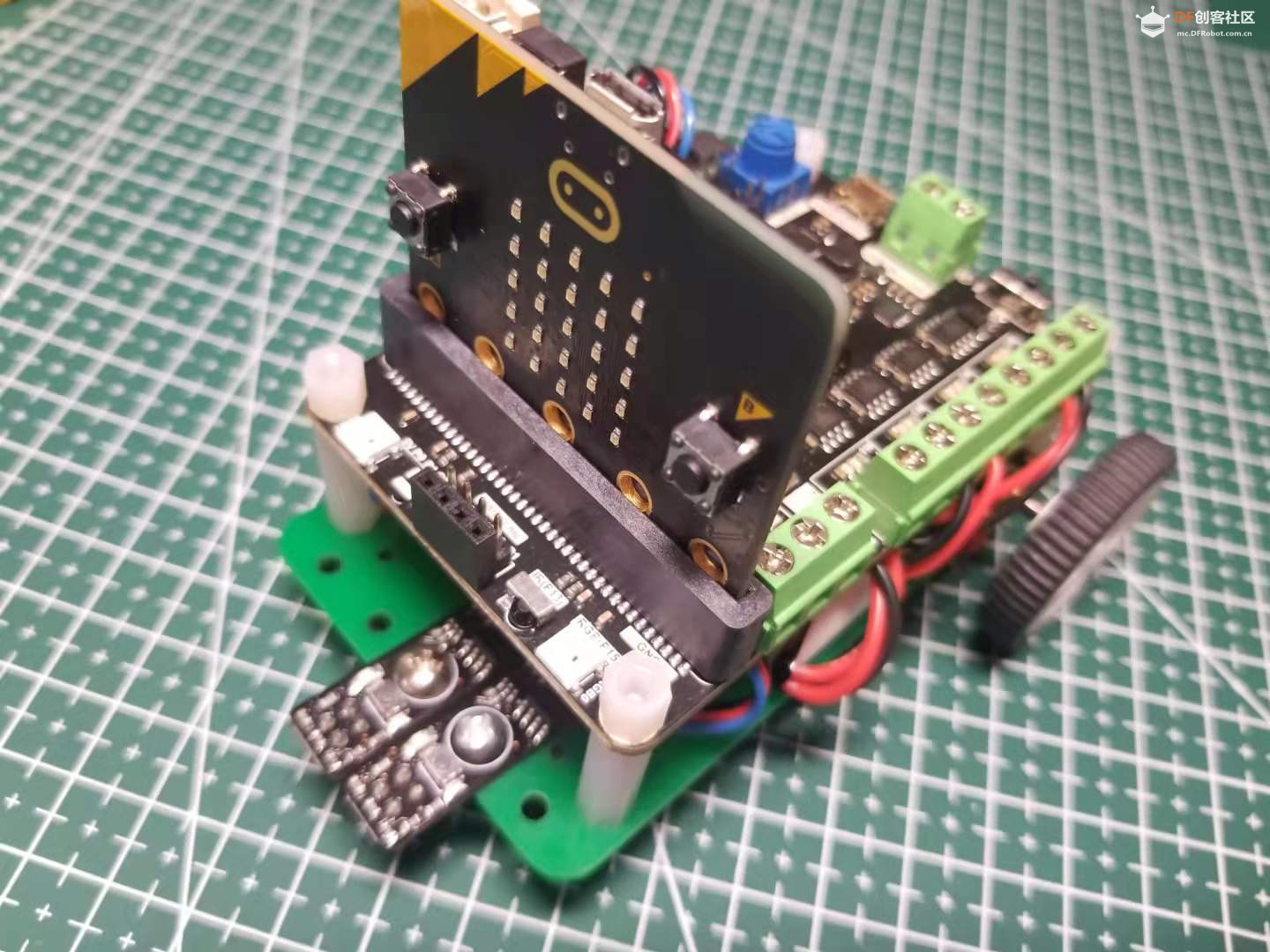 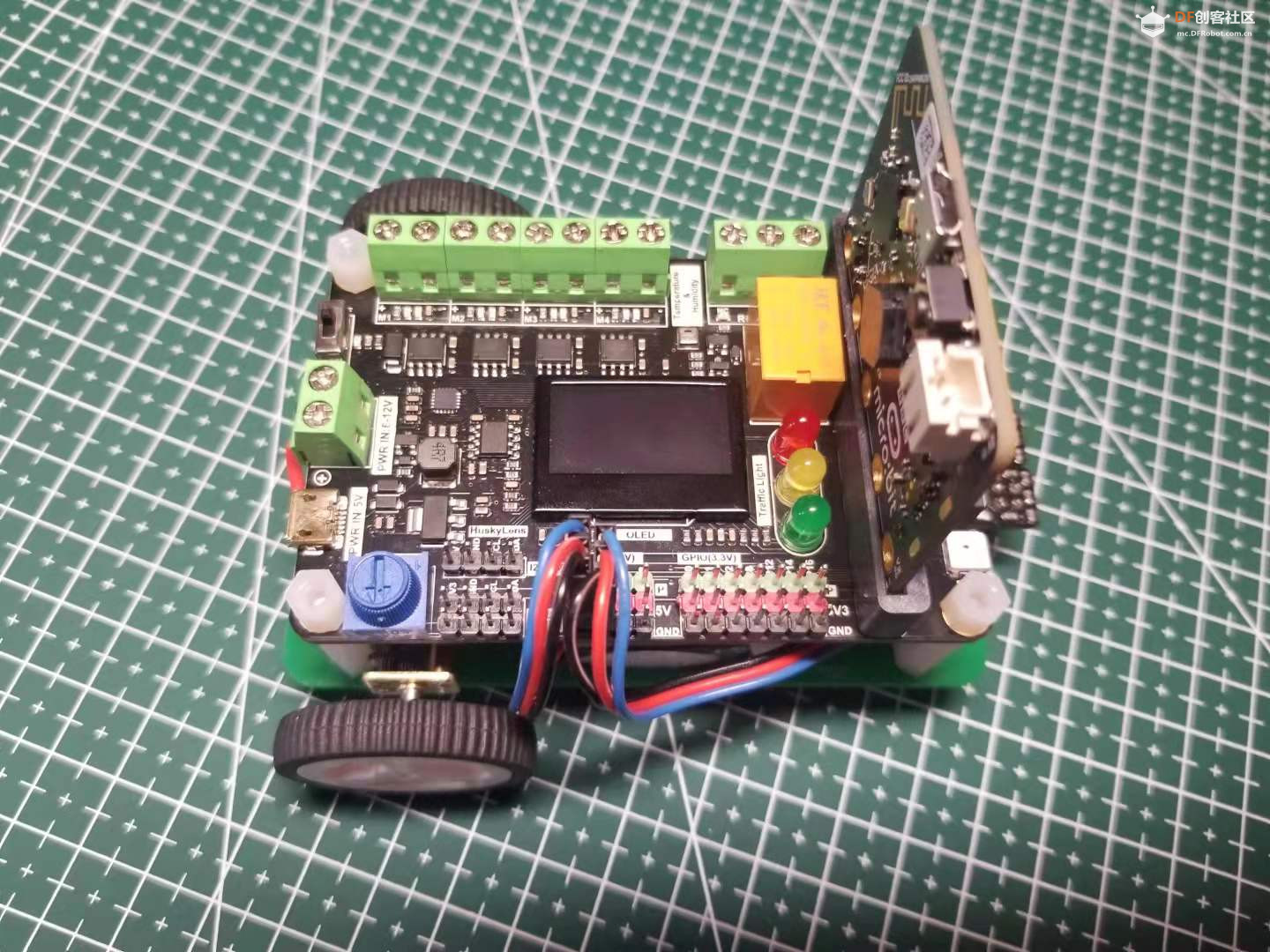 左灰度接A0 右灰度接A1 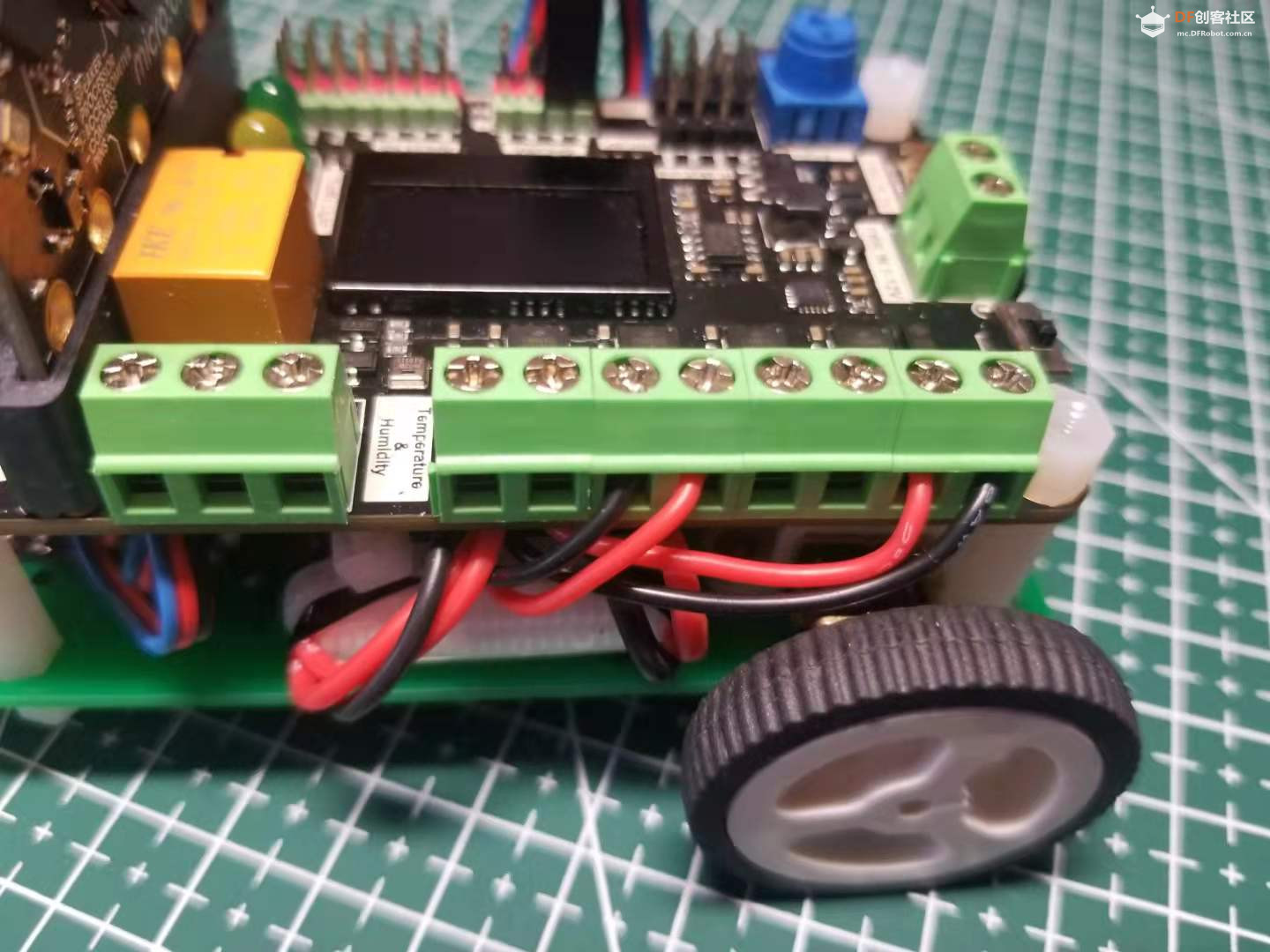 左电机接M1 右电机接M3 【灰度传感器】 小车的 Gravity: 智能灰度传感器 v1.0有两种模式,这儿使用是数字方式,,在黑线上时输出高电平,白线上输出低电平,设置方法见:点击观看:用作巡线时采集颜色方法的视频教程 | 小车在巡线时灰度的3种状态 1,左灰度脱线 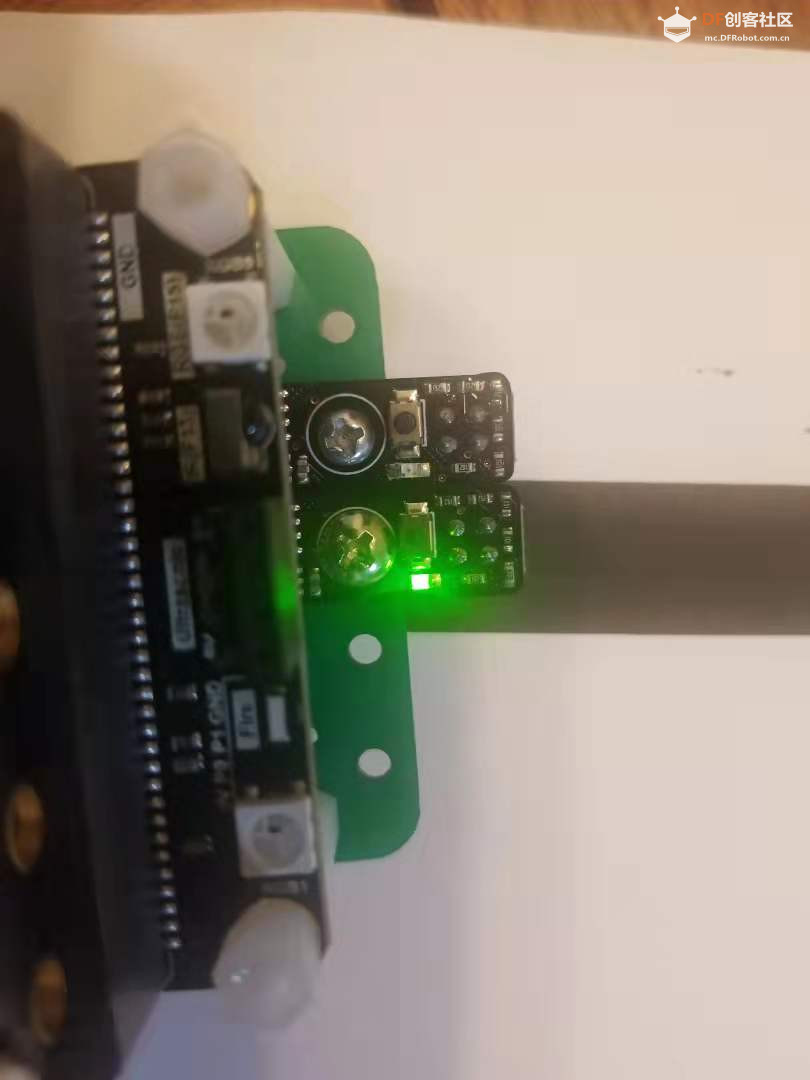 这时:A0低电平 ,A1高电平 小车应向右转弯 2,双灰度压线  这时:A0高电平 ,A1高电平 小车应前进 3,右灰度脱线 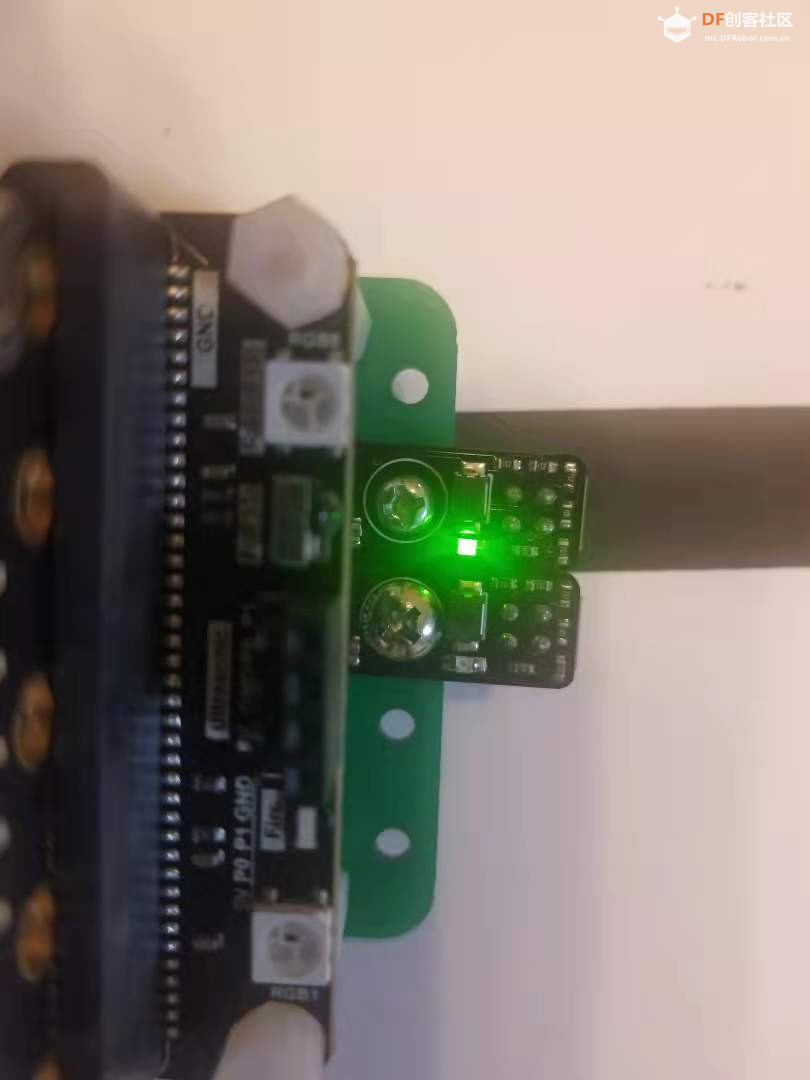 这时:A0高电平 ,A1低电平 小车应向左转弯 【程序】在Mind+ V1.7.1 RC2.0 版本下测试通过   测试2:巡线小车(按A启动).zip 测试2:巡线小车(按A启动).zip【演示视频】 【底盘结构件】 JLC 免费PCB打样,文件附上 JLC_EDA文件:PCB_N20小车_2021-09-10.zipN20小车二代_PCB_undefined_20210907213313.zip |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶