|
22028| 15
|
基于离线语音识别技术的漂移车 |

|
本帖最后由 gray6666 于 2022-3-5 19:13 编辑 一、项目起源 在某应用场景中,对漂移车进行简单的语音控制即可,无需联网操控。为了让漂移车和控制者之间有更好的人机交互,就会去使用离线语音技术,这样本地的控制会更加的快速与便捷。本次项目采用离线语音识别技术,该模块指令可以提前固定,也可以是自己设计的口令;在使用时,只需要对相应的指令进行识别即可,对网络性能没有要求,接收指令后的响应速度也相对更快。 二、设备清单  1.DFRduino UNO R3 *1 https://www.dfrobot.com.cn/goods-521.html 2.Proto Shield原型开发板(Arduino兼容) *1 https://www.dfrobot.com.cn/goods-62.html 3.L298N直流电机驱动模块*1 https://www.dfrobot.com.cn/goods-208.html 4.ASR-THREE离线语音识别模块 好好搭搭某宝店铺 5.9V电源及插头 https://www.dfrobot.com.cn/goods-386.html 6.玩具车模 *1 自备 7. LED灯小车*2 小车自带 三、修复车模 拆除小车的控制面板,测试电机和LED灯是否工作正常 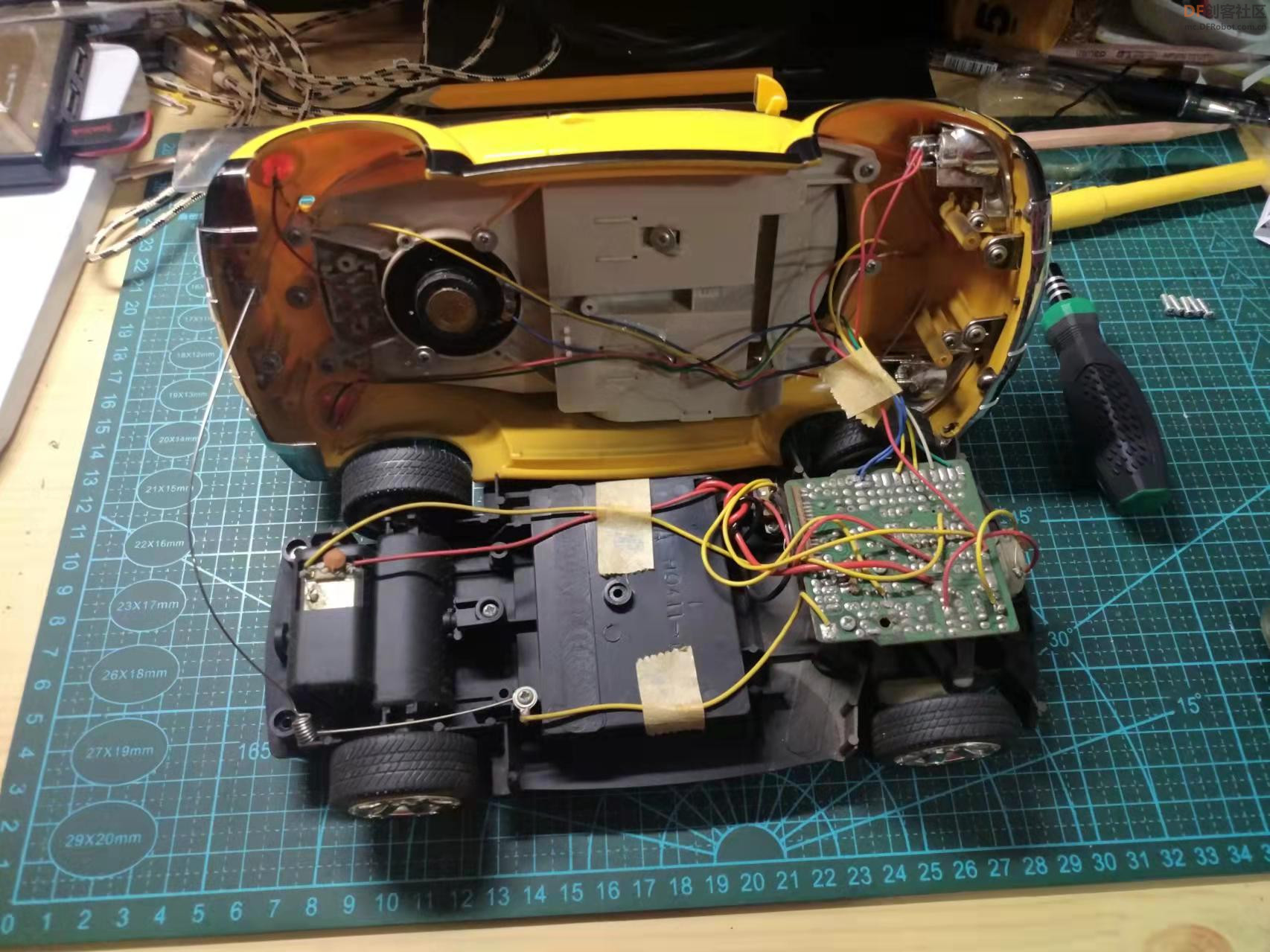  修复马达(常见创客实验马达),后轮动力采用经典的小齿轮带动大齿轮设计 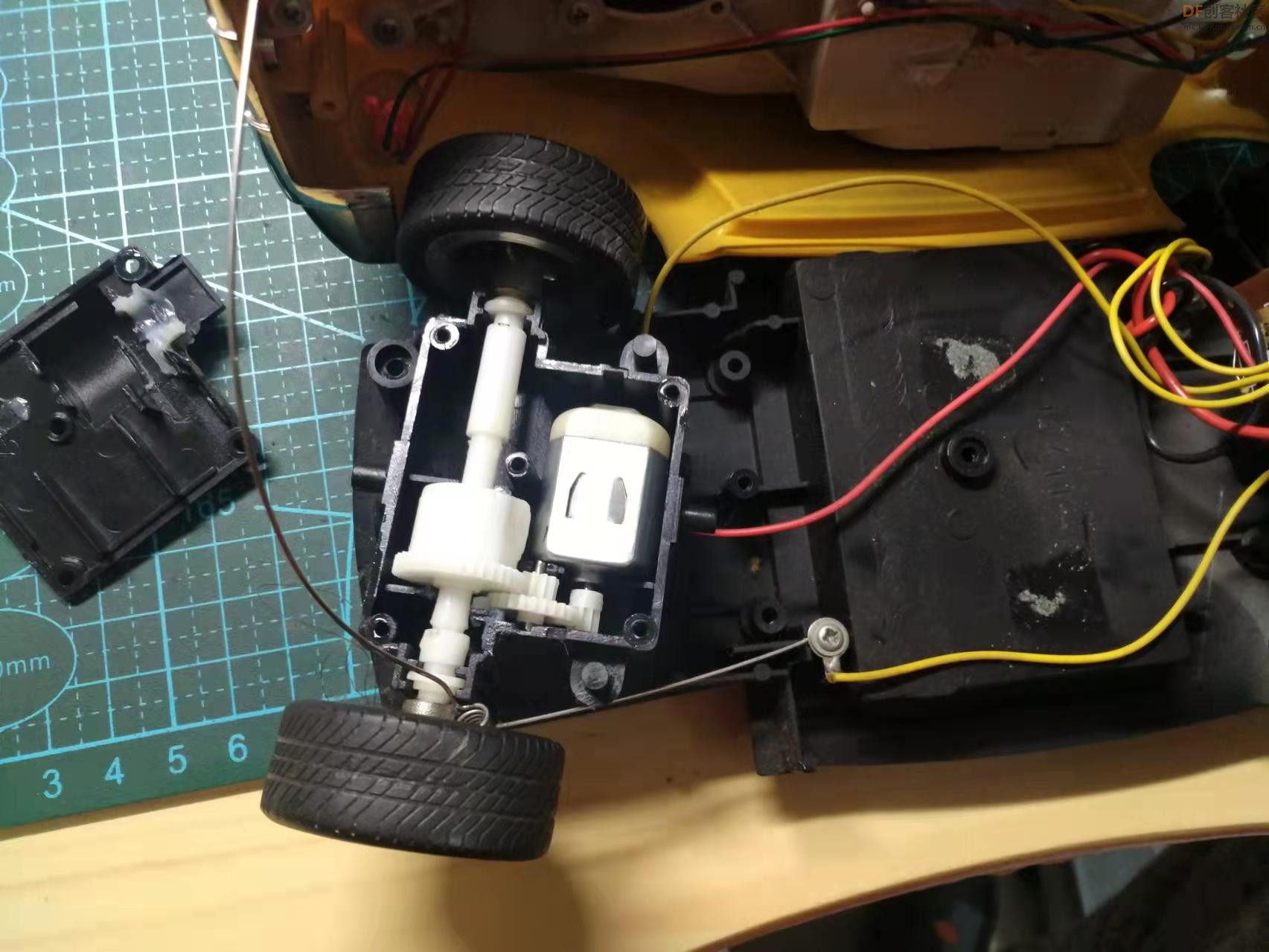 前轮采用电机正反转控制方向,隐藏有弹簧减震设计 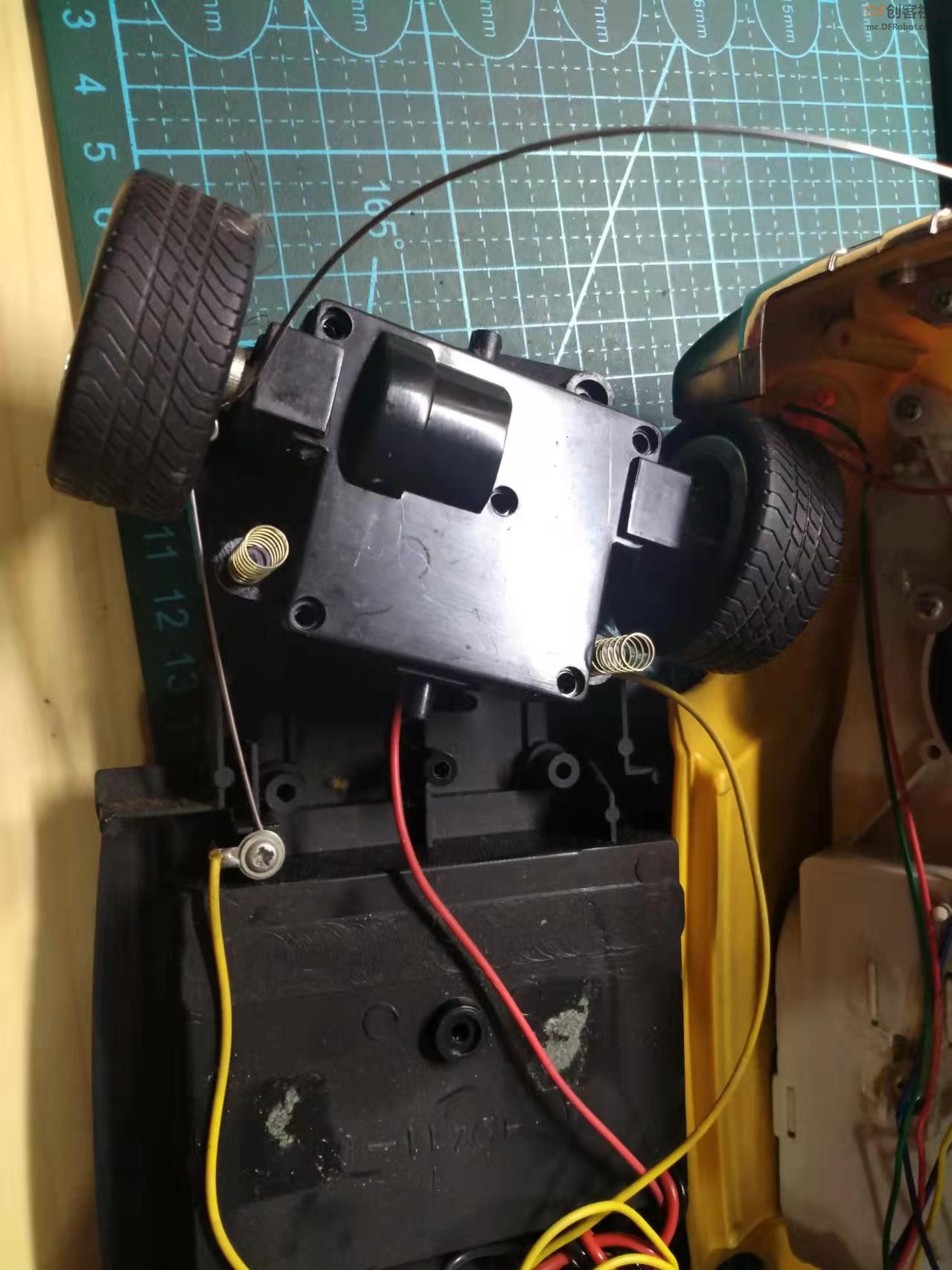 引出电机线和LED灯,按照说明连接 扩展板连接UNO板 3口连接语音模块,电源在UNO扩展板取电 4口连接小车的LED灯(此处2个LED串联可以同时控制开关),GND连接uno 板的GND  9V电池连接L298N VCC和GND ,L298N GND连接UNO板的GND,L298N的5V口连接UNO板的5V电源口,给uno板子供电; 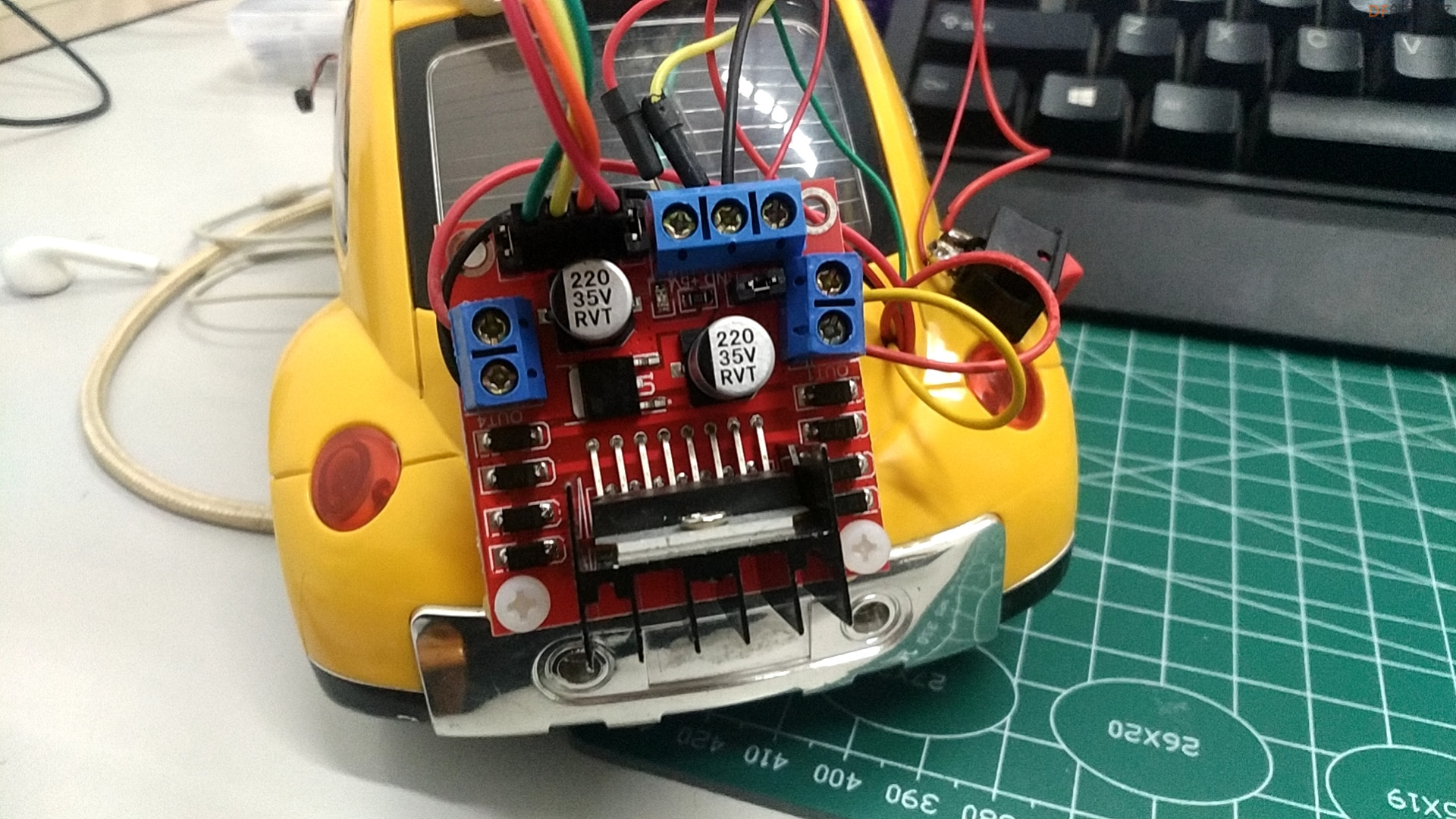 电机驱动原理参考  焊接了开关方便控制电源 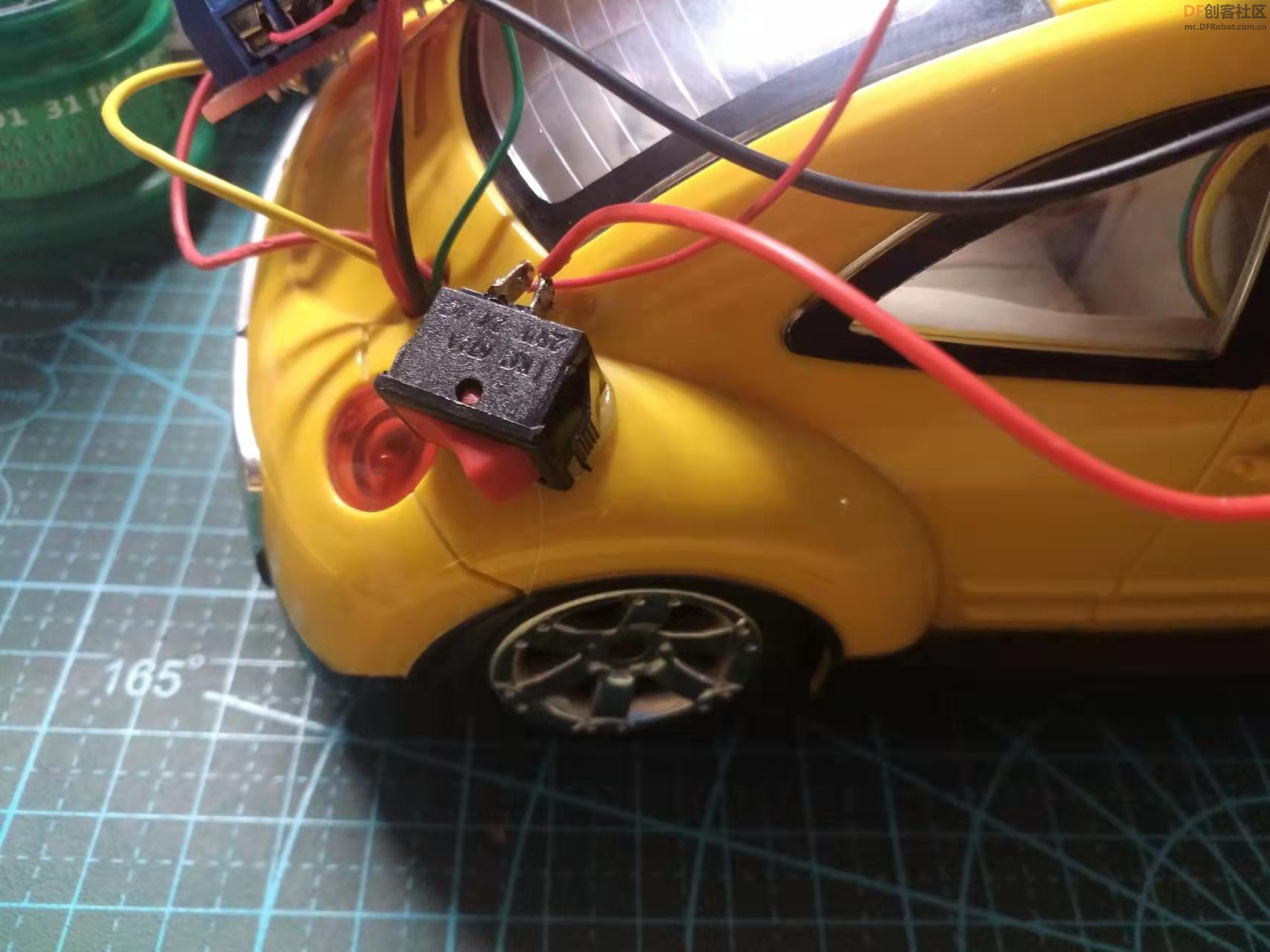 四、代码测试 语音模块初始化,测试灯是否正常  小车执行语音指令 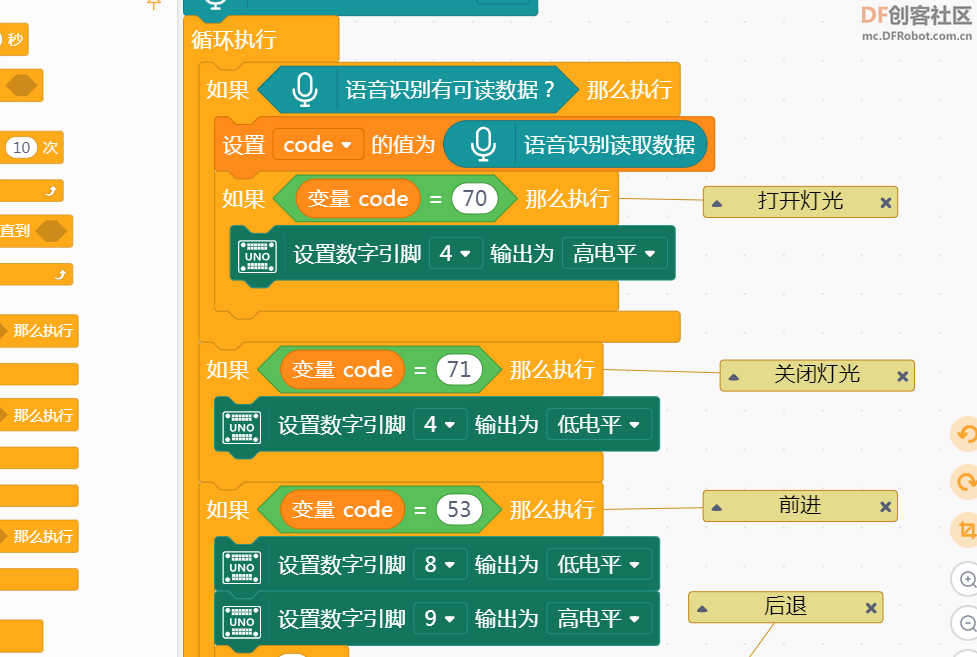 五、测试视频 六、参考代码  语音小车.rar 语音小车.rar |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶




 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 创客造
创客造
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






