|
程序十一:使用 TinyGPSCustom 对象数组监视所有可见的卫星 (1)Arduino参考开源代码
- /*
- 【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
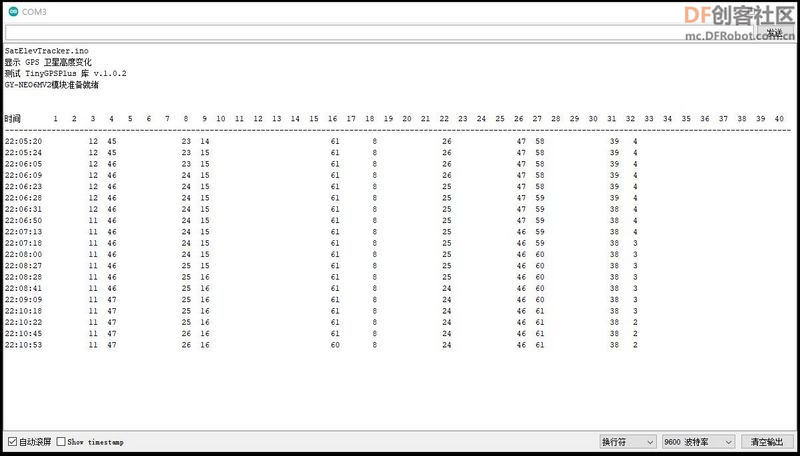
- 程序十一:使用 TinyGPSCustom 对象数组监视所有可见的卫星
- */
-
- #include <TinyGPSPlus.h>//导入驱动库
- #include <SoftwareSerial.h>
-
- static const int RXPin = 9, TXPin = 8;//定义软串口接脚
- static const uint32_t GPSBaud = 9600;
-
- // TinyGPSPlus 对象
- TinyGPSPlus gps;
-
- //与 GPS 设备的串行连接
- SoftwareSerial ss(RXPin, TXPin);
-
- /*
- 来自 http://aprs.gids.nl/nmea/:
-
- $GPGSV
-
- 视野中的 GPS 卫星
-
- 例如:
- $GPGSV,3,1,11,03,03,111,00,04,15,270,00,06,01,010,00,13,06,292,00*74 $GPGSV,3,2,11,14,25,170,00,16,57,208,39,18,67,296,40,19,40,246,00*74
- $GPGSV,3,3,11,22,42,067,42,24,14,311,43,27,05,244,00,,,,*4D
-
- 1 = 此周期中此类消息的总数
- 2 = 消息编号
- 3 = 视图中的 SV 总数
- 4 = SV PRN 号码
- 5 = 以度为单位的仰角,最大 90
- 6 = 方位角,从真北的度数,000 到 359
- 7 = SNR,00-99 dB(不跟踪时为空)
- 8-11 = 关于第二个 SV 的信息,与字段 4-7 相同
- 12-15=关于第三个 SV 的信息,与字段 4-7 相同
- 16-19= 关于第四个 SV 的信息,与字段 4-7 相同
- */
-
- static const int MAX_SATELLITES = 40;
-
- TinyGPSCustom totalGPGSVMessages(gps, "GPGSV", 1); // $GPGSV 句子,第一个元素
- TinyGPSCustom messageNumber(gps, "GPGSV", 2); // $GPGSV 句子,第二个元素
- TinyGPSCustom satsInView(gps, "GPGSV", 3); // $GPGSV 句子,第三个元素
- TinyGPSCustom satNumber[4]; // 稍后初始化
- TinyGPSCustom elevation[4];
- TinyGPSCustom azimuth[4];
- TinyGPSCustom snr[4];
-
- struct{
- bool active;
- int elevation;
- int azimuth;
- int snr;
- } sats[MAX_SATELLITES];
-
- void setup(){
- Serial.begin(9600);
- ss.begin(GPSBaud);
-
- Serial.println(F("SatelliteTracker.ino"));
- Serial.println(F("使用 TinyGPSCustom 监控卫星位置和信号强度"));
- Serial.print(F("测试 TinyGPSPlus 库 v."));
- Serial.println(TinyGPSPlus::libraryVersion());
- Serial.println(F("GY-NEO6MV2模块准备就绪"));
- Serial.println();
-
- // 初始化所有未初始化的 TinyGPSCustom 对象
- for (int i=0; i<4; ++i)
- {
- satNumber[i].begin(gps, "GPGSV", 4 + 4 * i); // offsets 4, 8, 12, 16
- elevation[i].begin(gps, "GPGSV", 5 + 4 * i); // offsets 5, 9, 13, 17
- azimuth[i].begin( gps, "GPGSV", 6 + 4 * i); // offsets 6, 10, 14, 18
- snr[i].begin( gps, "GPGSV", 7 + 4 * i); // offsets 7, 11, 15, 19
- }
- }
-
- void loop(){
- // 初始化所有未初始化的 TinyGPSCustom 对象
- if (ss.available() > 0)
- {
- gps.encode(ss.read());
- if (totalGPGSVMessages.isUpdated())
- {
- for (int i=0; i<4; ++i)
- {
- int no = atoi(satNumber[i].value());
- // Serial.print(F("SatNumber is ")); Serial.println(no);
- if (no >= 1 && no <= MAX_SATELLITES)
- {
- sats[no-1].elevation = atoi(elevation[i].value());
- sats[no-1].azimuth = atoi(azimuth[i].value());
- sats[no-1].snr = atoi(snr[i].value());
- sats[no-1].active = true;
- }
- }
-
- int totalMessages = atoi(totalGPGSVMessages.value());
- int currentMessage = atoi(messageNumber.value());
- if (totalMessages == currentMessage)
- {
- Serial.print(F("Sats="));
- Serial.print(gps.satellites.value());
- Serial.print(F(" Nums="));
- for (int i=0; i<MAX_SATELLITES; ++i)
- if (sats[i].active)
- {
- Serial.print(i+1);
- Serial.print(F(" "));
- }
- Serial.print(F(" 海拔="));//海拔
- for (int i=0; i<MAX_SATELLITES; ++i)
- if (sats[i].active)
- {
- Serial.print(sats[i].elevation);
- Serial.print(F(" "));
- }
- Serial.print(F(" 方位角="));//方位角
- for (int i=0; i<MAX_SATELLITES; ++i)
- if (sats[i].active)
- {
- Serial.print(sats[i].azimuth);
- Serial.print(F(" "));
- }
-
- Serial.print(F(" 信噪比="));//信噪比
- for (int i=0; i<MAX_SATELLITES; ++i)
- if (sats[i].active)
- {
- Serial.print(sats[i].snr);
- Serial.print(F(" "));
- }
- Serial.println();
-
- for (int i=0; i<MAX_SATELLITES; ++i)
- sats[i].active = false;
- }
- }
- }
- }
|



 沪公网安备31011502402448
沪公网安备31011502402448




 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






