|
中国酒泉卫星发射中心火箭转运模型
作品来源:第五届全国青少年人工智能挑战赛-开源硬件创意智造专项赛优秀作品
参赛学生:酒泉育才学校 程明祥 刘彦斌
指导老师:茹兵山 马建东
我的家乡是个美丽的地方,它有令人心旷神怡的秀丽风景,也有体现人文历史的雄伟建筑,还有令人垂涎欲滴的美味佳肴。作为当地的小主人公,请你运用所学的科技知识,结合本地元素创作出一个具有家乡特色的作品。
步骤1:方案讨论
接到这个任务,我们小组先对家乡比较出名的事物列举了一遍。
“要说家乡酒泉出名的无非就是酒泉拉条子、 酒泉拨疙瘩、酒泉凉皮面、酒泉牛肉拉面、酒泉麻辣烫……”说着自己的都口水下来了。
“嗨,你个吃货,就惦记着吃”我被组员打断了。
“对了,酒泉出名的还有月牙泉、 西汉胜迹、敦煌莫高窟、酒泉卫星发射 ……”
突然,眼前一亮,脑海中有了这样的画面:一千多年前,先民们在莫高窟的洞壁上绘制出了美丽的飞天,向浩渺苍穹发出第一声叩问。千年之后,神舟系列载人飞船乘坐火箭又从酒泉卫星发射中心起航,龙行太空,飞天梦圆。古代飞天和现代飞天都诞生于酒泉,仿佛天作之合。
酒泉卫星发射这个主题,要是排第二,就没有第一了。但是模拟火箭发射似乎重点需要解决火箭如何从地面飞起来,我们拿着可用器材清单仔细看了十遍,要让火箭上天,只能变成蘑菇云才能上去。拉来一火车这些硬件也没有办法。
我们灵机一动,何不给大家讲讲火箭发射之前的故事呢,于是开始找度娘……
我们从网络上找到了这些图片
上图提取到的信息:一丝不苟,分秒不差
上图提取到的信息:火箭是在这样的厂房里组装好的,这个门是一个向上开启的卷帘
上图提取到的信息:火箭是沿专用道路被牵引直立行走的
上图提取到的信息:
1.万无一失、圆满成功。
2.火箭移动到发射架上之后被发射架架臂抱住。
从这些图片上提取到有用的信息之后,我们讨论出了大致思路:
- 语音命令控制“火箭转运开始”;
- 卷帘门开启;
- 火箭出厂房;
- 沿道路缓慢移动到发射塔架处;
- 人脸摄像头识别到火箭标签后,塔架抱住火箭;
整个过程结束。
转运前,通过物联网获取天气信息播报出来,根据天气状况判断是否适合火箭转运,并用语音合成播放出来。屏幕显示温度湿度等信息……
思路有了,开工!
步骤2:设计并加工外观
两人一起讨论设计外观结构,计划用PVC板加工,这种板材比KT板结实一点,还有一个优点就是可用小刀随意加工。
设计完再次确认没有问题,就发到广告加工厂代加工,同伴负责去加工并带回来,我负责火箭模型和程序。
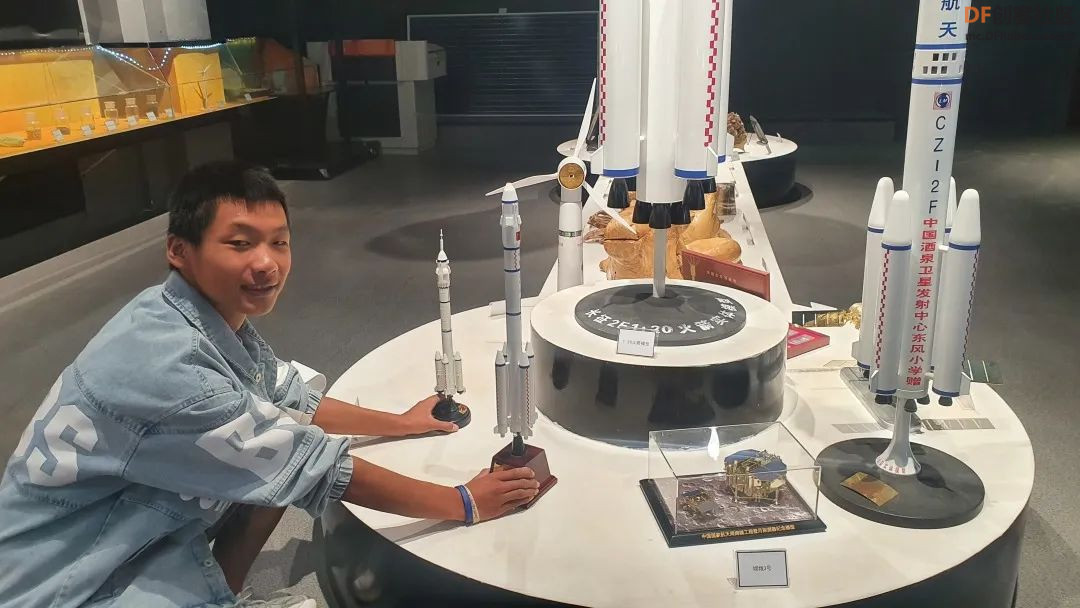
学校爱国教育展厅里好像有好多火箭,去看一看真没白跑,大大小小一共有4个。
这个尺寸刚刚好,最高的那个就算了吧。
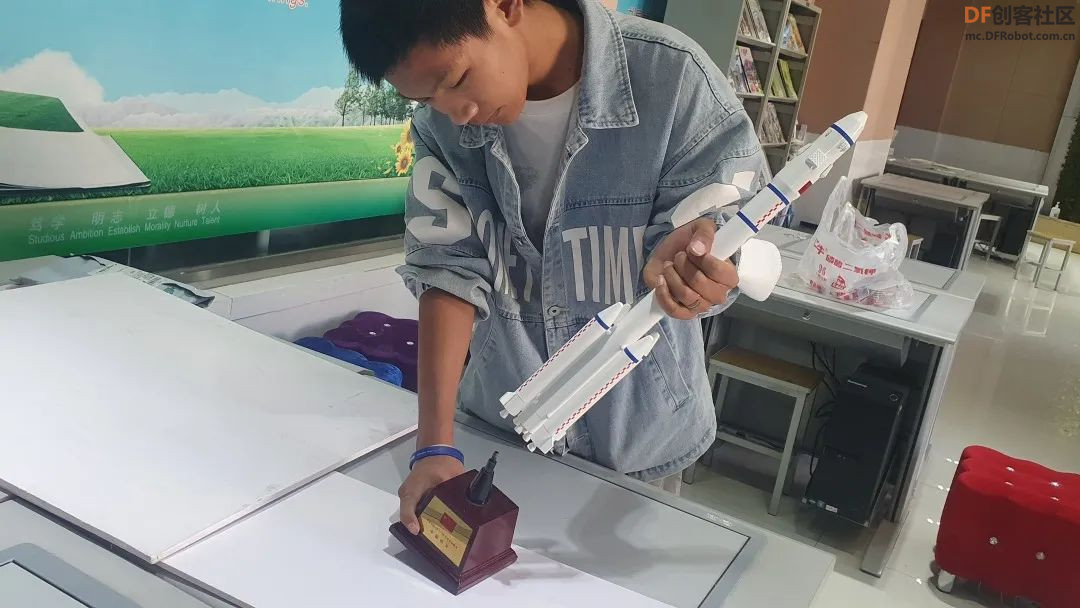
底座直接拧下来
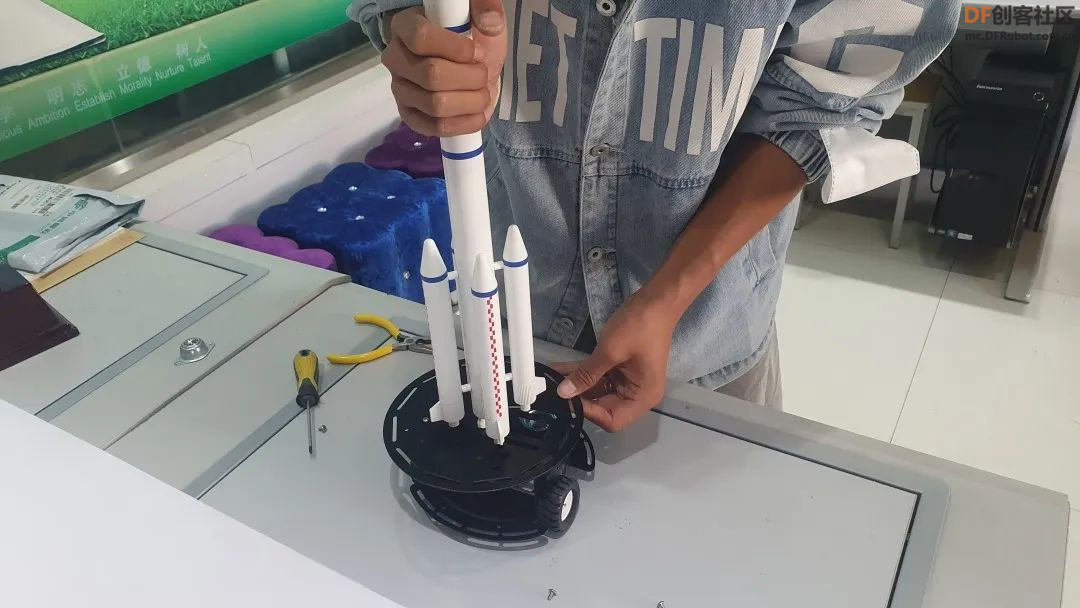
小车平台刚好做移动支架
去掉电机,找两个轮子安上
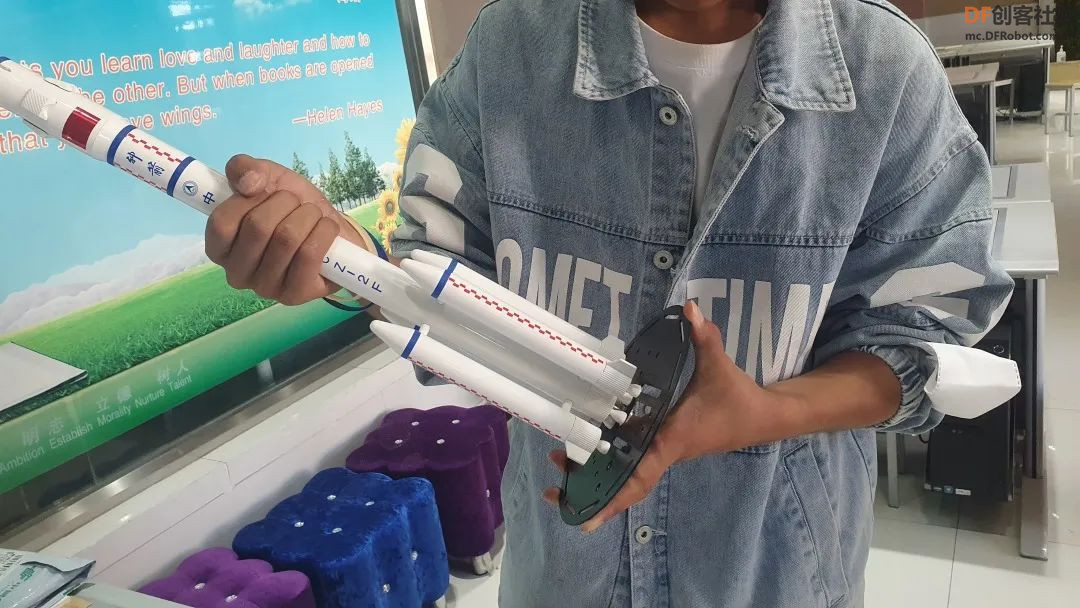
尺寸刚刚好
严丝合缝
完美!
其实最开始打算是用泡沫材料做一个火箭模型,当然这是小菜一碟,为了节省工夫,直接把现有的成品模型稍加改造,做到了旧物利用,展厅其实有两个火箭就足够了,放多了浪费。管理员把火箭借给我们,真是大意了,很可能就肉包子打狗,有去无回了。
接下来把镜头切换到伙伴那里。
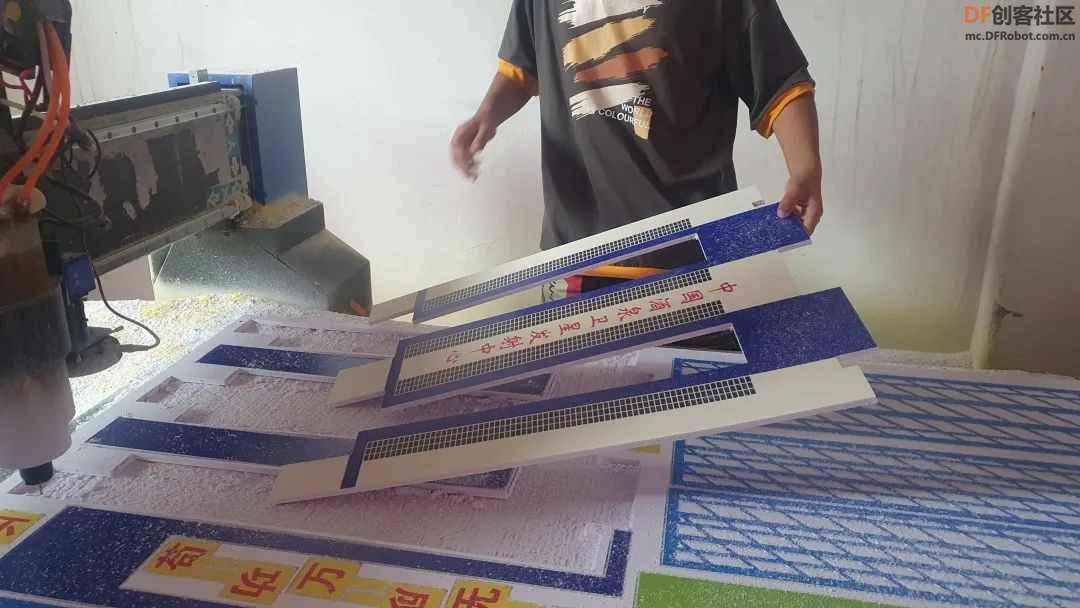
直接在板材上打印,太方便了,刚打印完墨水就干了。
接下来是切割。
原来是利钻头高速旋转切开的,长见识了。机器长了眼睛,比手工裁的精准多了。
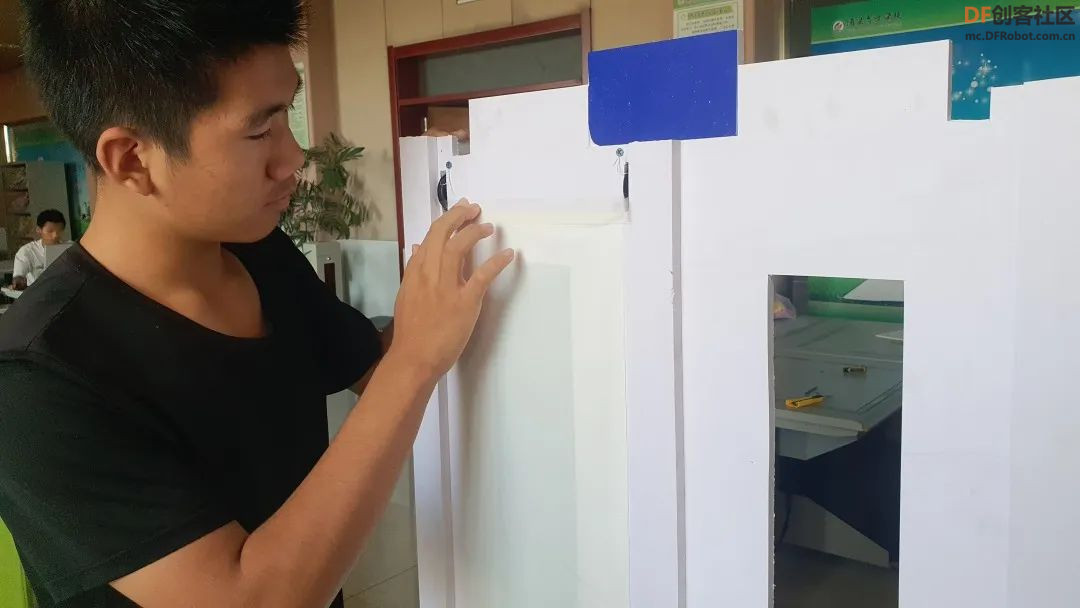
步骤3:外观组装及硬件连接
拉回来就迫不及待开始组装
三秒胶贴这种板材,真是绝配
几分钟,火箭发射架就有形了
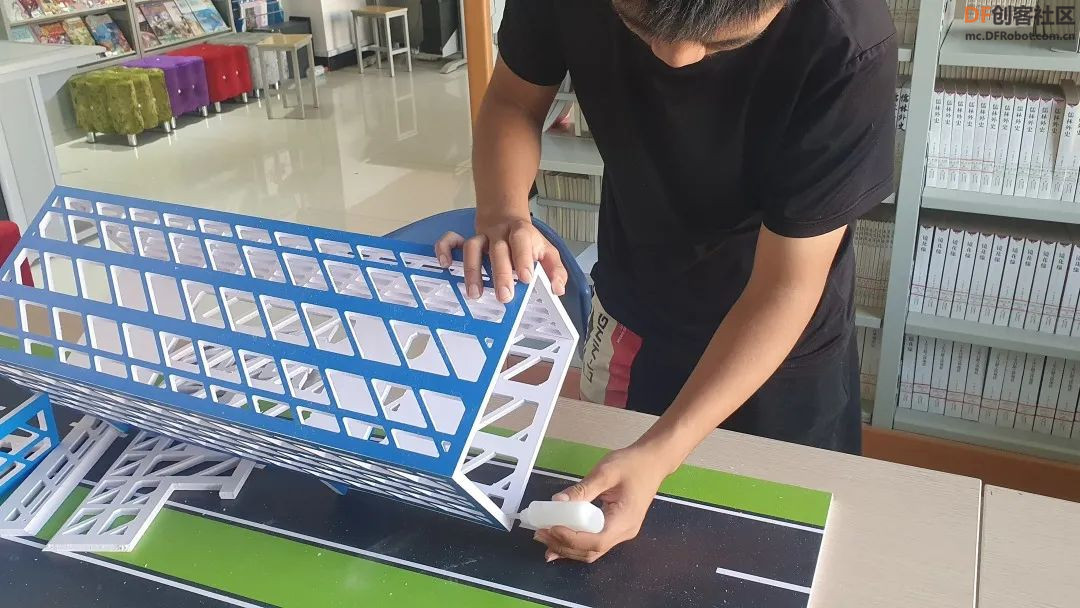
下面是垂直总装厂房组装
这里需要用到物理课上学过的滑轮,打电话给物理刘老师,刚好在学校,直接去物理实验室淘了一堆。
配合美工刀和三秒胶,你可以做出任何结构。
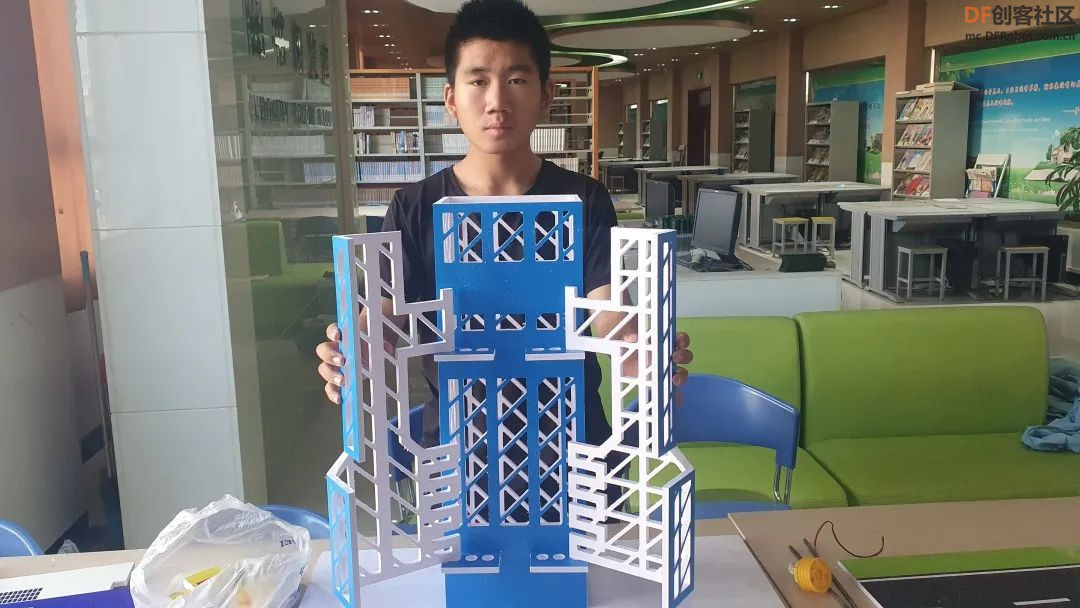
外观结构和所有电子元器件都安装到位,整体外观颜值还不错。
步骤3:程序编写与调试
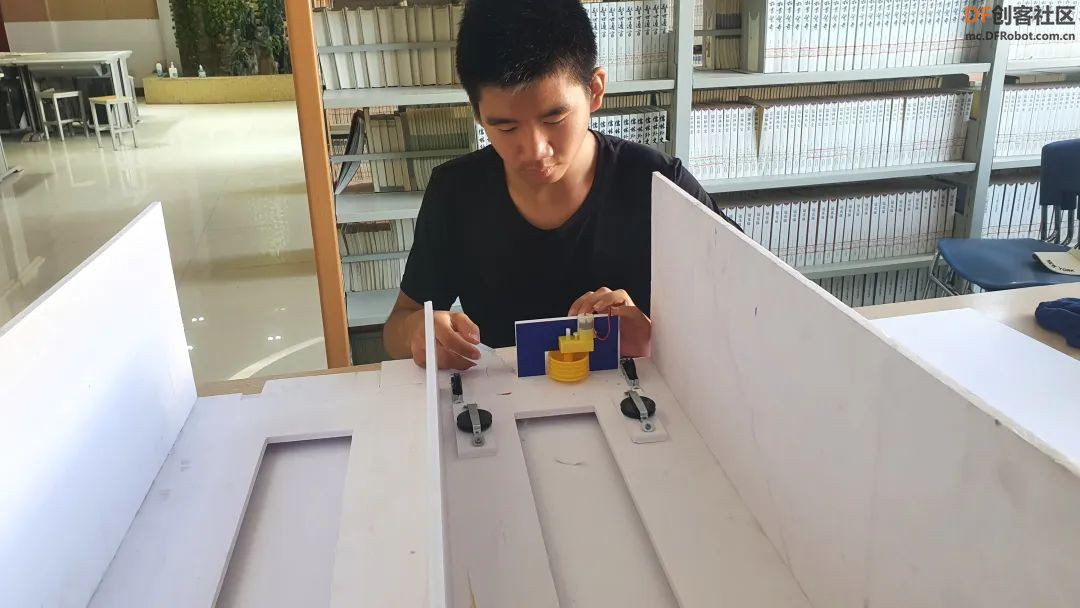
根据最开始讨论的大致思路,在伙伴做外观的同时,我就已经调试好了程序。
同伴做结构时把相关元器件就固定到了相应位置,简单调试后。基本功能可以实现了。
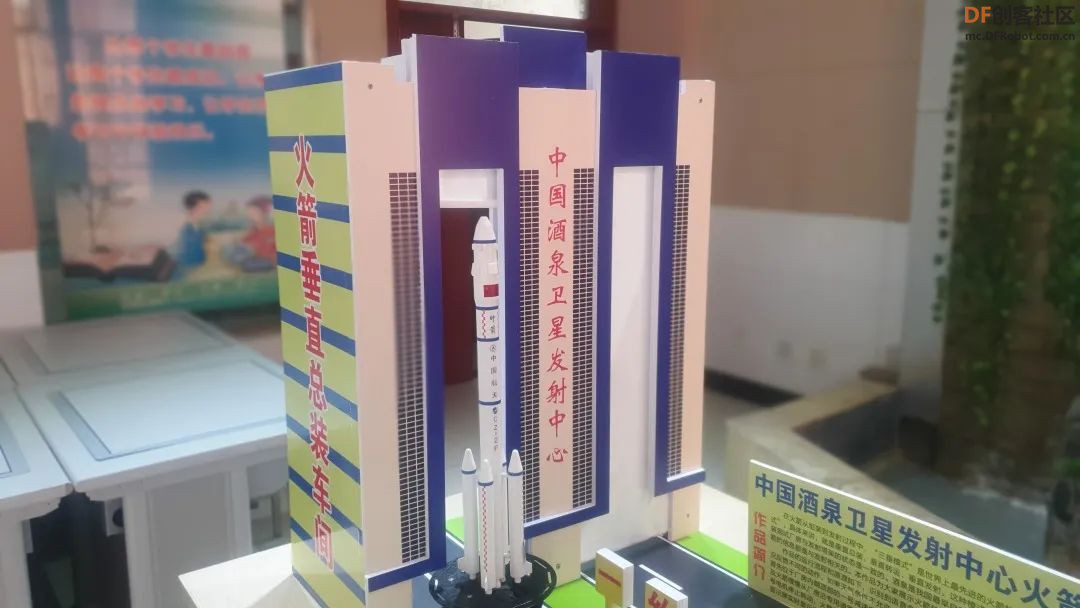
步骤5:成品展示
总装厂房特写
发射架特写
张开臂膀的发射架
从后面来一张
右方45度特写
硬件清单
Micro:bit主控板 x1
Micro:bit I/O扩展板 x1
人工智能视觉传感器 x1
RGB灯带 x1
舵机 x2
语音识别模块 x1
语音合成模块 x1
OLED显示屏 x1
数字按钮 x1
模拟角度传感器 x1
温湿度传感器 x1
桌面机器人平台 x1
USB数据线 x1
连接线 x100
代码:
- /*!
- * MindPlus
- * microbit
- *
- */
- #include <DFRobot_DHT.h>
- #include <IOBOX_Motor.h>
- #include <DFRobot_Task.h>
- #include <DFRobot_ASR_M.h>
- #include <DFRobot_Servo.h>
- #include <DFRobot_HuskyLens.h>
- #include <DFRobot_SSD1306_I2C.h>
- #include <DFRobot_SpeechSynthesis_M.h>
-
- // 动态变量
- volatile float mind_n_FengLi, mind_n_ZuoDuoJi, mind_n_YouDuoJi;
- newTask(loop1)
- // 静态常量
- const chCode chBuf[] = {
- {0x6e29,0xe6b8a9,0xCEC2,{0x00,0x00,0x23,0xf8,0x12,0x08,0x12,0x08,0x83,0xf8,0x42,0x08,0x42,0x08,0x13,0xf8,0x10,0x00,0x27,0xfc,0xe4,0xa4,0x24,0xa4,0x24,0xa4,0x24,0xa4,0x2f,0xfe,0x00,0x00}},
- {0x5ea6,0xe5baa6,0xB6C8,{0x01,0x00,0x00,0x80,0x3f,0xfe,0x22,0x20,0x22,0x20,0x3f,0xfc,0x22,0x20,0x22,0x20,0x23,0xe0,0x20,0x00,0x2f,0xf0,0x24,0x10,0x42,0x20,0x41,0xc0,0x86,0x30,0x38,0x0e}},
- {0xff1a,0xefbc9a,0xA3BA,{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x00,0x30,0x00,0x00,0x00,0x30,0x00,0x30,0x00,0x00,0x00,0x00,0x00}},
- {0x6e7f,0xe6b9bf,0xCAAA,{0x00,0x00,0x27,0xf8,0x14,0x08,0x14,0x08,0x87,0xf8,0x44,0x08,0x44,0x08,0x17,0xf8,0x11,0x20,0x21,0x20,0xe9,0x24,0x25,0x28,0x23,0x30,0x21,0x20,0x2f,0xfe,0x00,0x00}},
- {0x98ce,0xe9a38e,0xB7E7,{0x00,0x00,0x3f,0xf0,0x20,0x10,0x20,0x10,0x28,0x50,0x24,0x50,0x22,0x90,0x22,0x90,0x21,0x10,0x21,0x10,0x22,0x90,0x22,0x92,0x24,0x4a,0x48,0x4a,0x40,0x06,0x80,0x02}},
- {0x529b,0xe58a9b,0xC1A6,{0x02,0x00,0x02,0x00,0x02,0x00,0x02,0x00,0x7f,0xf8,0x02,0x08,0x02,0x08,0x02,0x08,0x02,0x08,0x04,0x08,0x04,0x08,0x08,0x08,0x08,0x08,0x10,0x88,0x20,0x50,0x40,0x20}},
- {0x4e00,0xe4b880,0xD2BB,{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xff,0xfe,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}},
- {0x7ea7,0xe7baa7,0xBCB6,{0x10,0x00,0x13,0xfc,0x20,0x84,0x20,0x88,0x48,0x88,0xf8,0x90,0x10,0x9c,0x20,0x84,0x41,0x44,0xf9,0x44,0x41,0x28,0x01,0x28,0x1a,0x10,0xe2,0x28,0x44,0x44,0x01,0x82}}
- };
- // 创建对象
- DFRobot_HuskyLens huskylens;
- DFRobot_SSD1306_I2C oled12864;
- DFRobot_SpeechSynthesis_I2C sstts;
- DFRobot_ASR asr;
- DFRobot_DHT dht11_16;
- Servo servo_12;
- Servo servo_13;
- IOBOX_Motor motor_ib;
-
-
- // 主程序开始
- void setup() {
- dht11_16.begin(16, DHT11);
- oled12864.setChCode(chBuf);
- servo_12.attach(12);
- servo_13.attach(13);
- huskylens.beginSoftwareSerialUntilSuccess(14, 13);
- huskylens.writeAlgorithm(ALGORITHM_TAG_RECOGNITION);
- oled12864.begin(0x3c);
- sstts.begin(sstts.eV1);
- sstts.setVolume(10);
- sstts.setSpeed(5);
- sstts.setSoundType(sstts.eMale1);
- sstts.setTone(5);
- asr.begin(LOOP, MIC);
- asr.addCommand("huo jian zhuan yun kai shi", 1);
- asr.start();
- mind_n_FengLi = 1;
- oled12864.setCursorLine(2);
- oled12864.printLine((String("温度:") + String(dht11_16.getTemperature())));
- // 实时显示温湿度
- oled12864.setCursorLine(3);
- oled12864.printLine((String("湿度:") + String(dht11_16.getHumidity())));
- oled12864.setCursorLine(4);
- oled12864.printLine((String("风力:") + String("一级")));
- }
- void loop() {
- // 通过旋钮开关控制摇臂开合
- servo_12.angle(abs((map((analogRead(0)), 0, 1023, 175, 70))));
- servo_13.angle(abs((map((analogRead(0)), 0, 1023, 10, 100))));
- // 接收指令
- if (((asr.read()==1) || ((digitalRead(8))==1))) {
- sstts.speak("收到命令,正在检测天气状况,请稍等");
- delay(3000);
- // 判断条件,是否能够进行转运
- if ((mind_n_FengLi<=3)) {
- // 播报实时天气情况
- sstts.speak((String((String((String("温度:") + String(dht11_16.getTemperature()))) + String((String("湿度:") + String(dht11_16.getHumidity()))))) + String("风力一级,天气状况良好,火箭转运启动中")));
- delay(5500);
- sstts.speak("正在开启厂房大门,预计需要20秒");
- // 开启厂房大门
- motor_ib.motorRun(motor_ib.M1, motor_ib.CW, 45);
- delay(18000);
- motor_ib.motorStop(motor_ib.M1);
- sstts.speak("大门已开启,火箭即将移动");
- delay(2000);
- sstts.speak("火箭开始转运,预计需要三分钟");
- // 牵引火箭转运,直到识别到二维码后停止·
- while (!(huskylens.readBlockCenterParameterDirect().ID==1)) {
- motor_ib.motorRun(motor_ib.M2, motor_ib.CW, 45);
- yield();
- }
- motor_ib.motorStop(motor_ib.M2);
- sstts.speak("火箭已转运到指定位置,发射架摇臂即将启动");
- delay(3500);
- taskStart(loop1);
- }
- else {
- sstts.speak("当前天气状况不适合火箭转运,请另行选择转运时间");
- delay(5500);
- }
- }
- }
-
-
- // 子线程1程序开始
- void loop1::setup() {
- servo_12.attach(12);
- servo_13.attach(13);
- mind_n_ZuoDuoJi = 70;
- mind_n_YouDuoJi = 100;
- sstts.speak("发射架摇臂正在转动");
- for (int index = 0; index < 245; index++) {
- delay(45);
- servo_12.angle(abs(mind_n_ZuoDuoJi));
- mind_n_ZuoDuoJi += 0.44;
- servo_13.angle(abs(mind_n_YouDuoJi));
- mind_n_YouDuoJi -= 0.4;
- yield();
- }
- sstts.speak("发射架摇臂已转动到目标位置,火箭转运过程完毕,感谢观看");
- }
- void loop1::loop() {
-
- }
视频
以下是最终作品解说视频
步骤6:作品总结及反思
本次作品制作过程中,遇到了以下几个问题:
1.舵机转动速度太快,带到发射架摇臂时有点吃力,我们设置了一个角度变量,用循环次数配合等待时间控制舵机转动速度,完美解决这个问题。
2.硬件清单里没有风速传感器,所以程序里面的风速是直接指定数值
3.解说员的普通话水平还有待提升
附件下载:
附件包含的文件如下:
接线图、元件清单、程序截图、sb3源程序
 中国酒泉卫星发射中心火箭转运模型.zip 中国酒泉卫星发射中心火箭转运模型.zip
|




































 沪公网安备31011502402448
沪公网安备31011502402448

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 666666
666666
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






