|
5480| 1
|
[ESP8266/ESP32] FireBeetle 2 ESP32-S3+自制工业机器人无线控制手柄 |
|
本帖最后由 纪泓丞 于 2023-9-4 17:39 编辑 非常感谢DFRobot让我最近有幸试用了FireBeetle 2 ESP32-S3,这是一款基于ESP32-S3-WROOM-1-N16R8模组设计的主控板。该主控板采用了ESP32-S3芯片,具备强大的神经网络运算能力和信号处理能力,非常适用于图像识别、语音识别等项目。首先,我对FireBeetle 2 ESP32-S3的内存容量印象深刻。它搭载了16MB Flash和8MB PSRAM,这使得我可以存储更多的代码和数据,从而提升了项目的灵活性和扩展性。FireBeetle 2 ESP32-S3还配备了摄像头接口,方便连接摄像头。与此同时,它还具备独立的摄像头供电电路,有效减少了其他信号对摄像头的干扰。开发板附带的OV2640摄像头拥有200万像素和68°视场角,最高支持1600*1200分辨率,为我提供了高质量的图像采集能力。 此外,FireBeetle 2 ESP32-S3还具备GDI屏幕接口,解决了我在使用屏幕时的接线问题。它还集成了电源管理功能,支持锂电池充电和硬件开关机,方便我在实际应用中进行电源管理。在通信方面,FireBeetle 2 ESP32-S3支持Wi-Fi和Bluetooth 5 (LE)双模通讯,大大降低了设备配网的难度。同时,它还支持蓝牙Mesh和乐鑫Wi-Fi Mesh协议,实现了更高的通信稳定性和更大的覆盖面积。此外,FireBeetle 2 ESP32-S3还支持Matter协议,可用于开发符合智能家居行业统一标准的设备,在物联网场景中具有广泛的应用前景。 基于以上信息,刚好最近在做机械臂的项目,于是我就想利用这块主控,加上现在手上的资源,做一个机械臂的无线控制器。 项目需求: 1. 利用FireBeetle 2 ESP32-S3作为下位机主控实时反馈传感器的数据给PC上位机 2. 下位机要实时采集姿态传感器的数据 3. 下位机上要有一个屏幕能显示采集的数据 4. 设计一个手柄,能承载这些硬件 5. 加上电池,实现无线控制、 6. 设计几个按钮,可以实现初始化陀螺仪,控制收发数据等 根据以上的项目需求和FireBeetle 2 ESP32-S3的特性,对硬件做出选型 硬件选型: 1. 姿态传感器选择mpu6050。MPU6050是一款集成了三轴陀螺仪和三轴加速度计的传感器模块。它由InvenSense公司开发,采用了现代MEMS技术,提供了精确的运动跟踪和姿态感知功能。MPU6050内部集成了三轴陀螺仪和三轴加速度计,它们通过测量物体的旋转和加速度来提供准确的运动数据。陀螺仪可以测量物体绕着三个轴(X、Y、Z)的旋转速度,而加速度计可以测量物体在三个轴上的线性加速度。MPU6050具有高精度和快速响应的特点,可以在非常短的时间内提供准确的运动数据。它的测量范围广泛,陀螺仪的量程可达±250、±500、±1000和±2000度/秒,加速度计的量程可达±2、±4、±8和±16g。MPU6050通过I2C总线与微控制器或其他设备进行通信。它可以直接与Arduino等开发板连接,并通过简单的代码进行配置和读取数据。在使用MPU6050时,可以通过读取陀螺仪和加速度计的数据,结合相关算法,实现姿态感知、角度测量、运动跟踪等功能。由于其小巧的尺寸和易于使用的特点,MPU6050广泛应用于航空航天、机器人、智能手持设备、运动追踪器等领域。它为开发者提供了一种简单而有效的方式来获取物体的运动信息,并在各种应用中实现精确的姿态感知和运动控制。 屏幕选择一款0.96英寸的oled显示模块。0.96英寸的OLED显示模块是一种小尺寸的显示设备,它采用了OLED(Organic Light Emitting Diode)技术,能够提供高对比度和鲜艳的图像显示。该OLED显示模块的尺寸为0.96英寸,分辨率为128x64像素,这意味着它能够在有限的空间内显示相对较多的信息。这种高分辨率的显示能力使得它非常适合用于小型设备或者需要显示有限信息的应用。 该OLED显示模块采用I2C接口,这是一种常见的串行通信协议,能够方便地与微控制器或其他设备进行通信。使用I2C接口,可以通过简单的命令和数据传输来控制和更新OLED显示内容,从而实现各种图形、文字和动画的显示效果。 OLED显示模块具有自发光的特点,每个像素点都是独立发光的,因此不需要背光灯,能够实现更高的对比度和更广的视角。这使得显示效果清晰、亮度均匀,并且对于室外或者低光环境下的可读性也非常好。 由于其小巧、高对比度和低功耗的特点,0.96英寸的OLED显示模块被广泛应用于智能手表、可穿戴设备、便携式仪器、物联网设备等各种小型电子产品中。它能够提供清晰、鲜艳的显示效果,为用户提供良好的用户体验。同时,由于其采用了I2C接口,使用和控制也相对简单,方便开发者快速集成到自己的项目中。 2. 屏幕选择一款0.96英寸的oled显示模块。0.96英寸的OLED显示模块是一种小尺寸的显示设备,它采用了OLED(Organic Light Emitting Diode)技术,能够提供高对比度和鲜艳的图像显示。该OLED显示模块的尺寸为0.96英寸,分辨率为128x64像素,这意味着它能够在有限的空间内显示相对较多的信息。这种高分辨率的显示能力使得它非常适合用于小型设备或者需要显示有限信息的应用。该OLED显示模块采用I2C接口,这是一种常见的串行通信协议,能够方便地与微控制器或其他设备进行通信。使用I2C接口,可以通过简单的命令和数据传输来控制和更新OLED显示内容,从而实现各种图形、文字和动画的显示效果。OLED显示模块具有自发光的特点,每个像素点都是独立发光的,因此不需要背光灯,能够实现更高的对比度和更广的视角。这使得显示效果清晰、亮度均匀,并且对于室外或者低光环境下的可读性也非常好。由于其小巧、高对比度和低功耗的特点,0.96英寸的OLED显示模块被广泛应用于智能手表、可穿戴设备、便携式仪器、物联网设备等各种小型电子产品中。它能够提供清晰、鲜艳的显示效果,为用户提供良好的用户体验。同时,由于其采用了I2C接口,使用和控制也相对简单,方便开发者快速集成到自己的项目中。 3. 电池选用一块500ma的锂电池,电压3.7v 4. 导线,拨动开关,按钮 硬件选型如下图: 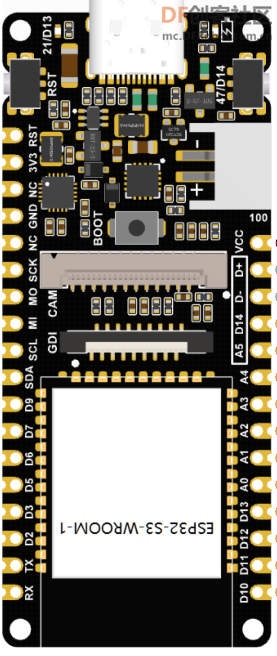 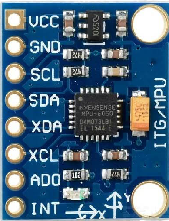     硬件选型好后,就根据硬件尺寸和需求开始设计外壳了。我本次采用fusion 360设计外壳。总体风格模仿了一些手柄的外观。顶部加上显示屏,侧面是一些按键和开关。主控USB接口放在底部。 其实设计的过程中,是打版了好几次,才迭代到这个最终版本的 一直在修改 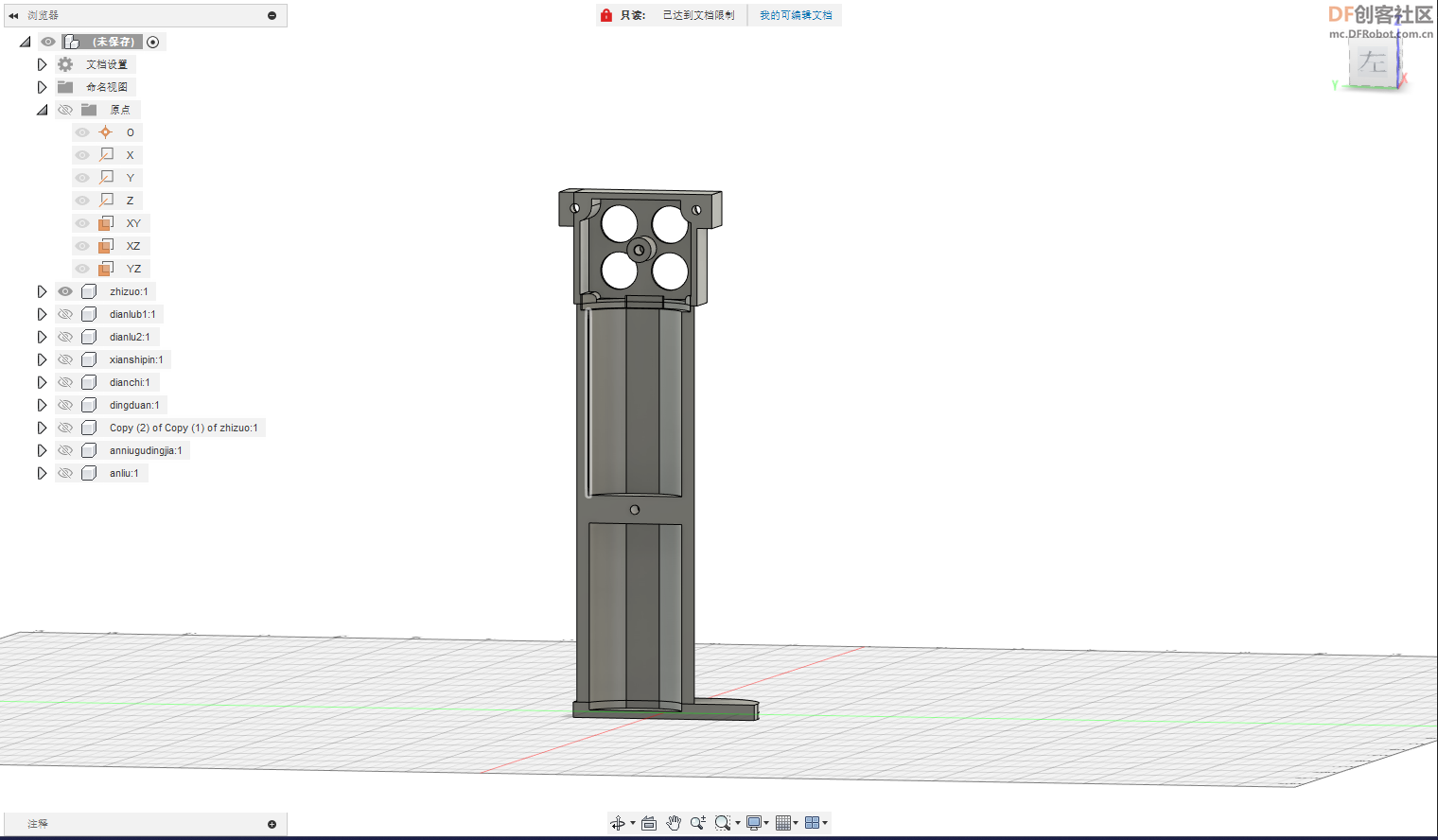 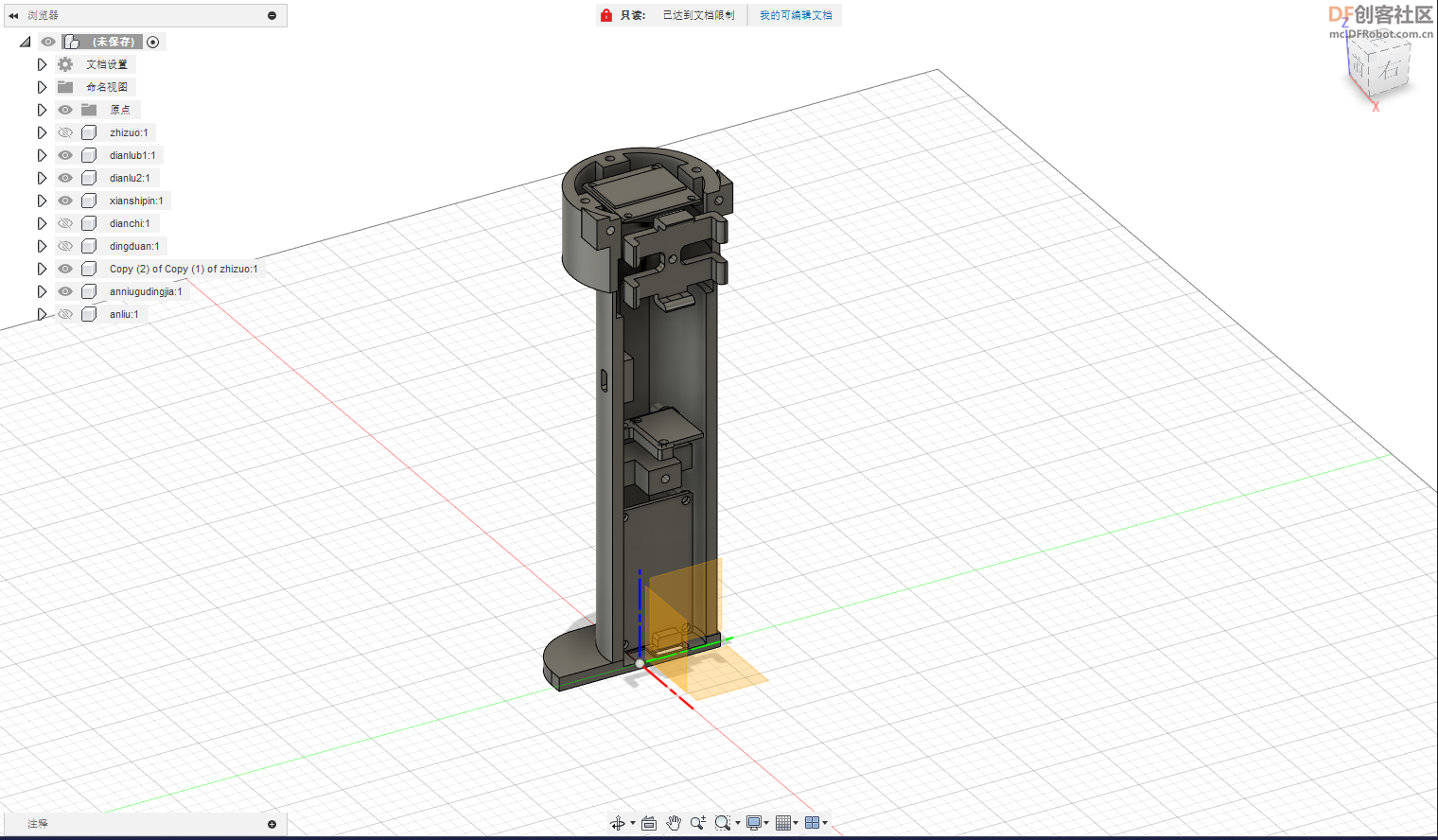  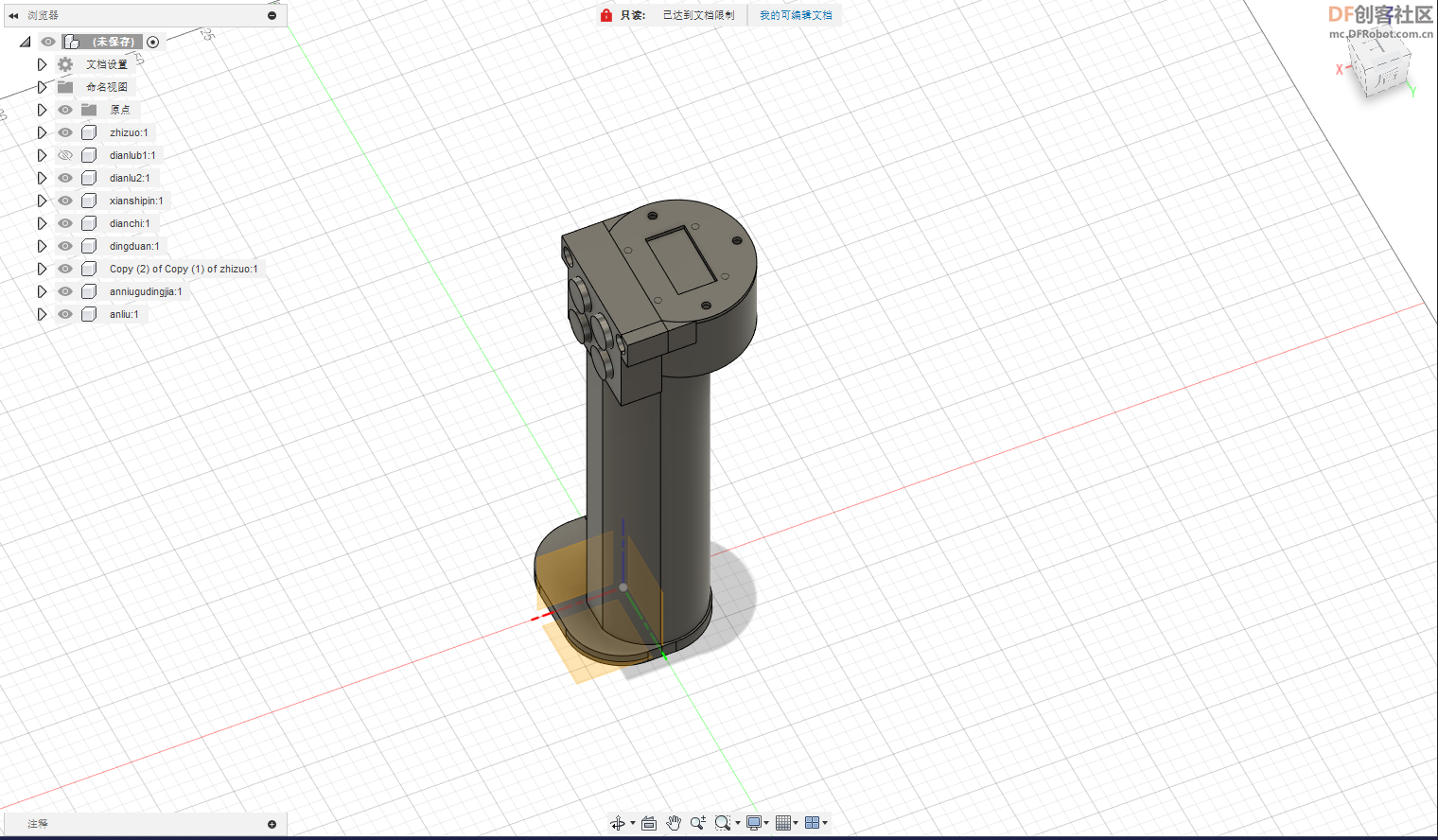 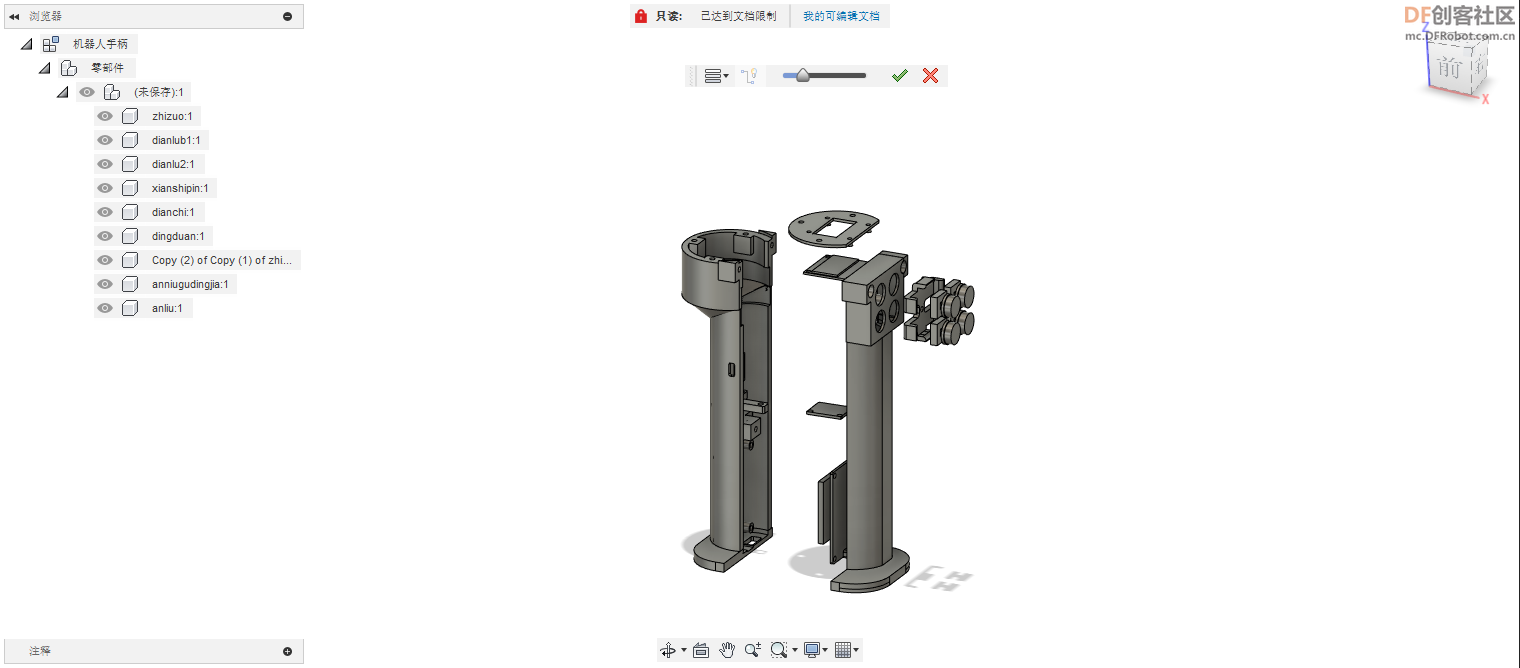 设计好外壳,就可以3D打印啦。。。。 导入打印机 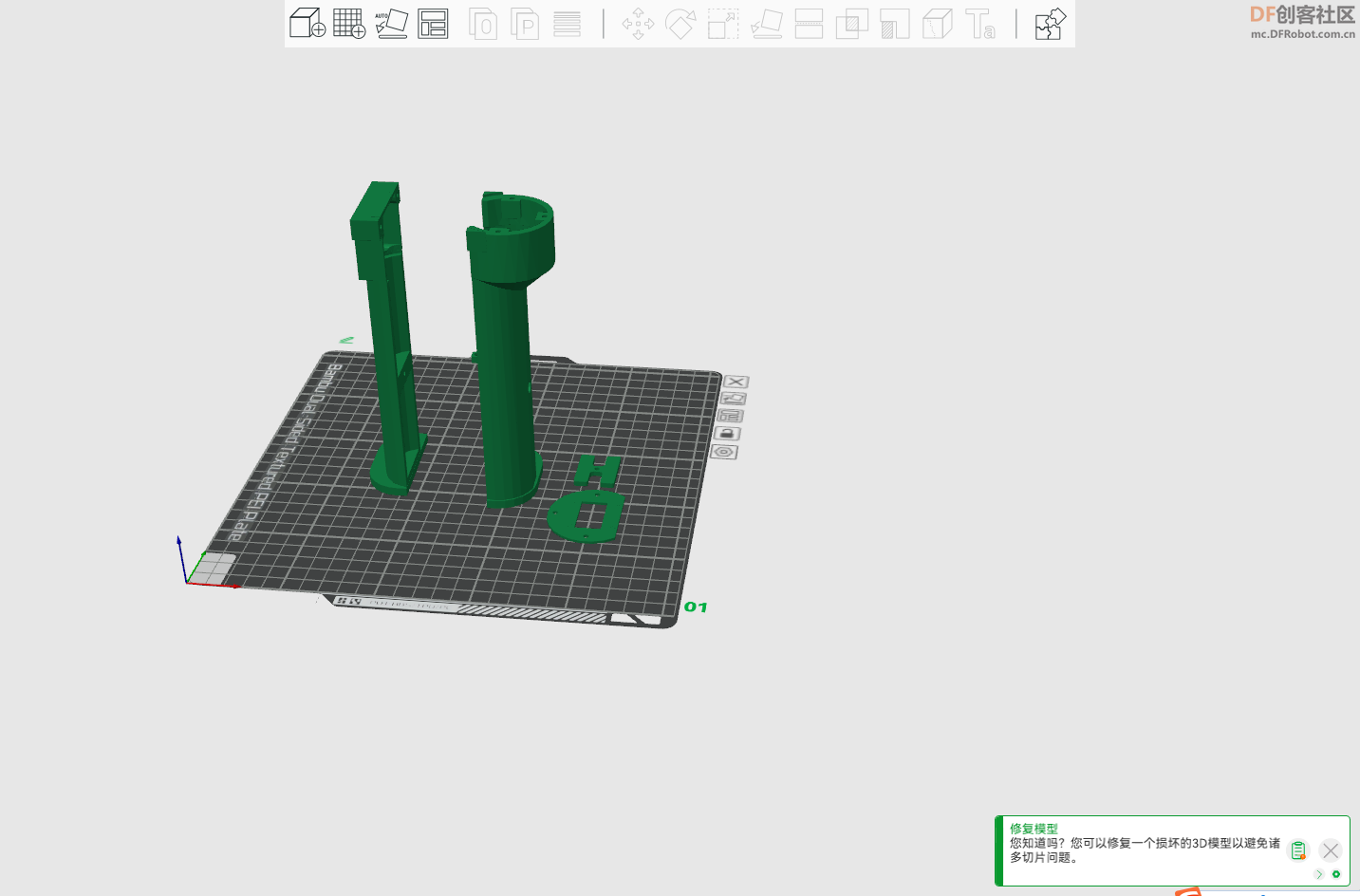 开始打印 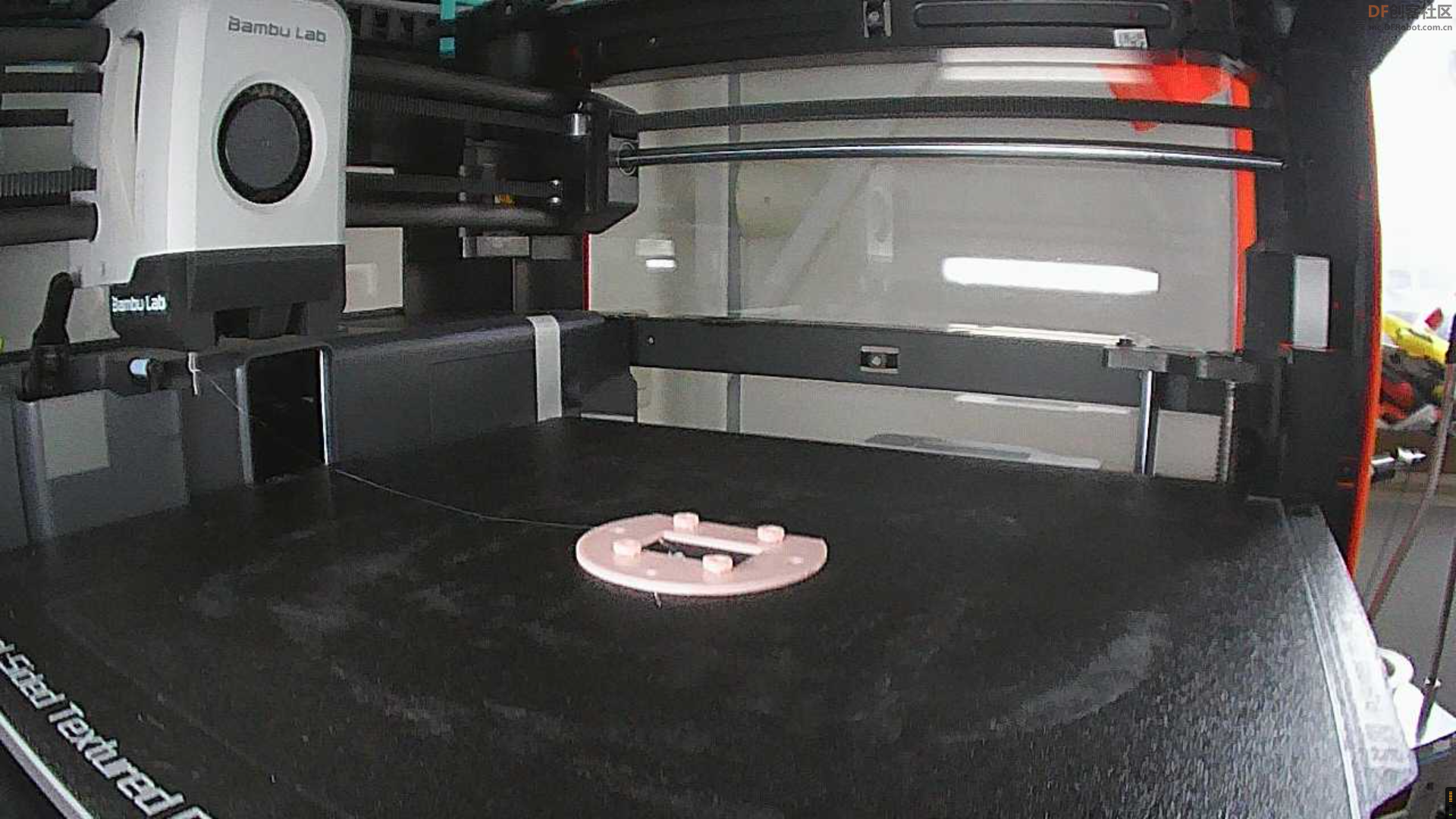  打印成品,两种颜色不是我的设计 我是不会承认,橙色的耗材没有了。。 整体采用PETG材料,耐高温,有韧性   打印件和硬件一起来张全家福 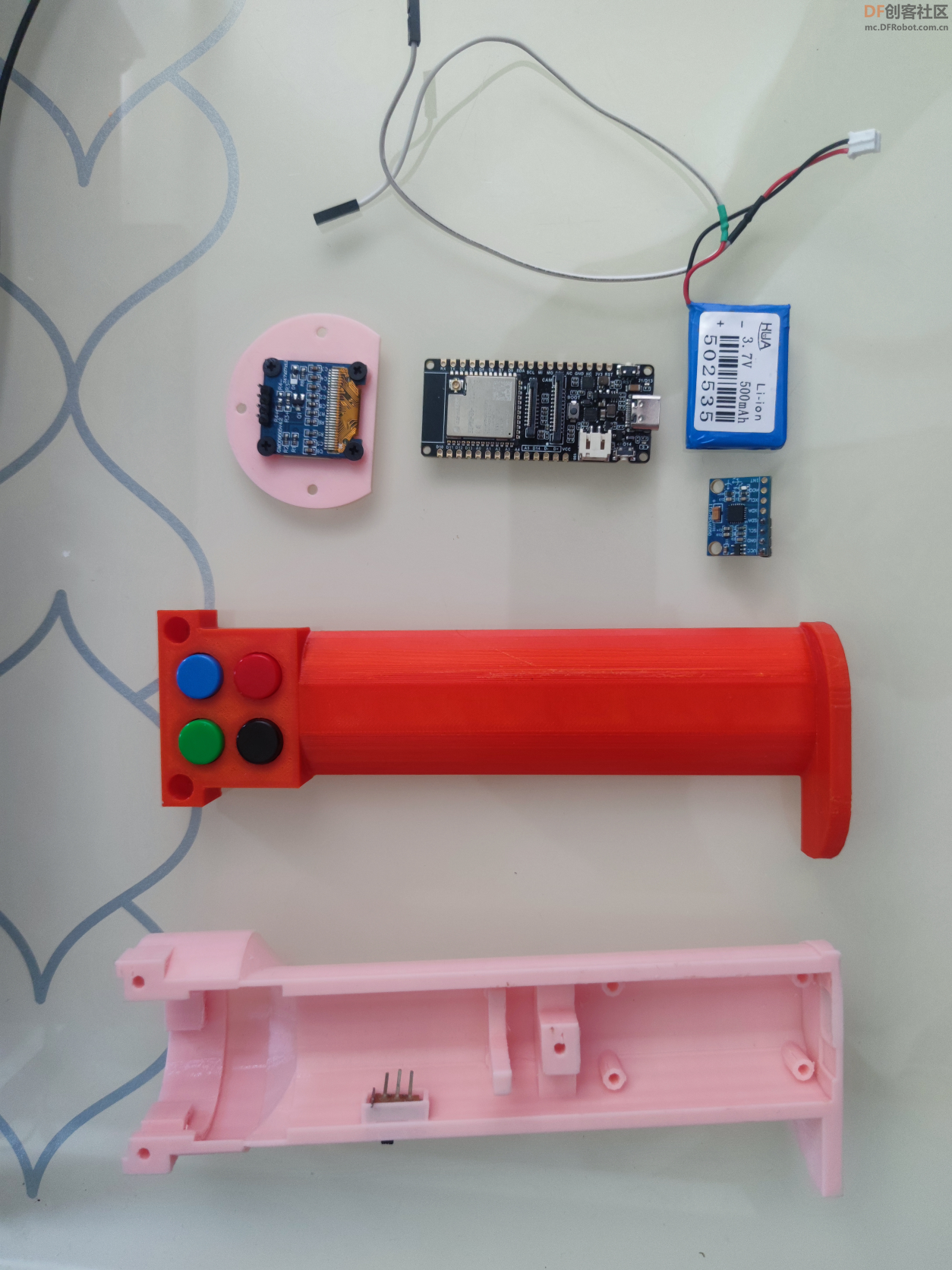 这猛男粉的配色大家觉得怎么样?狗头。。。 接线来就是硬件焊接组装啦。。 附上硬件接线图 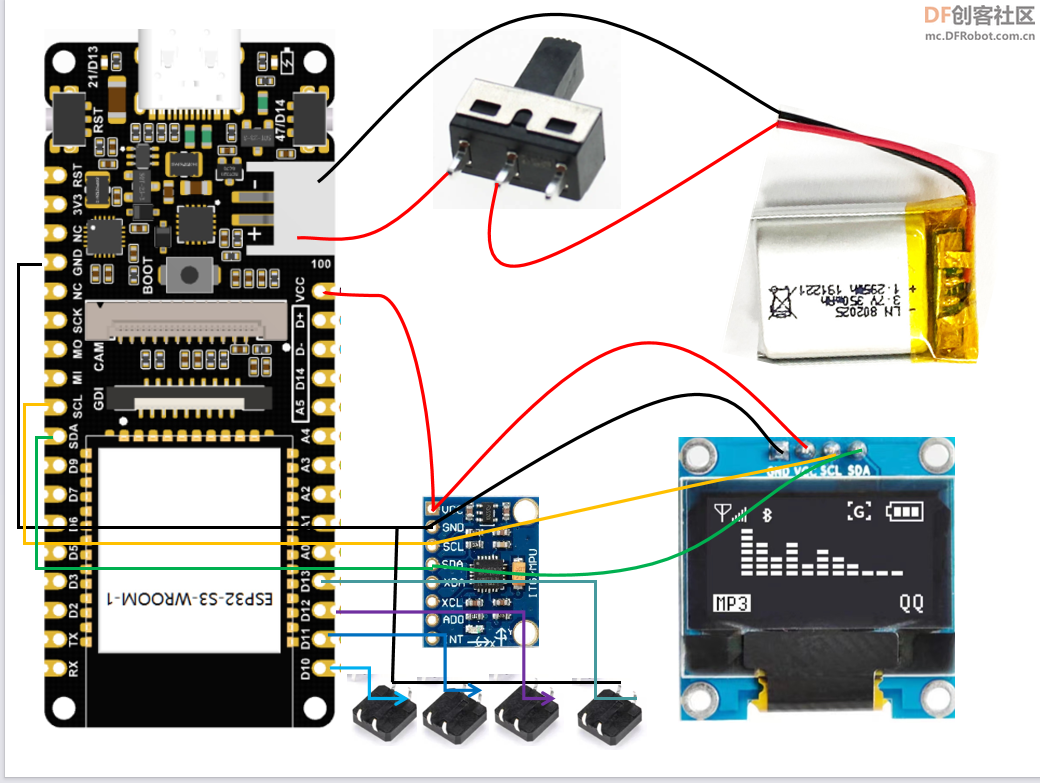 有了接线图,就开始接线 组装啦,m3*6的螺丝6颗,组装外壳 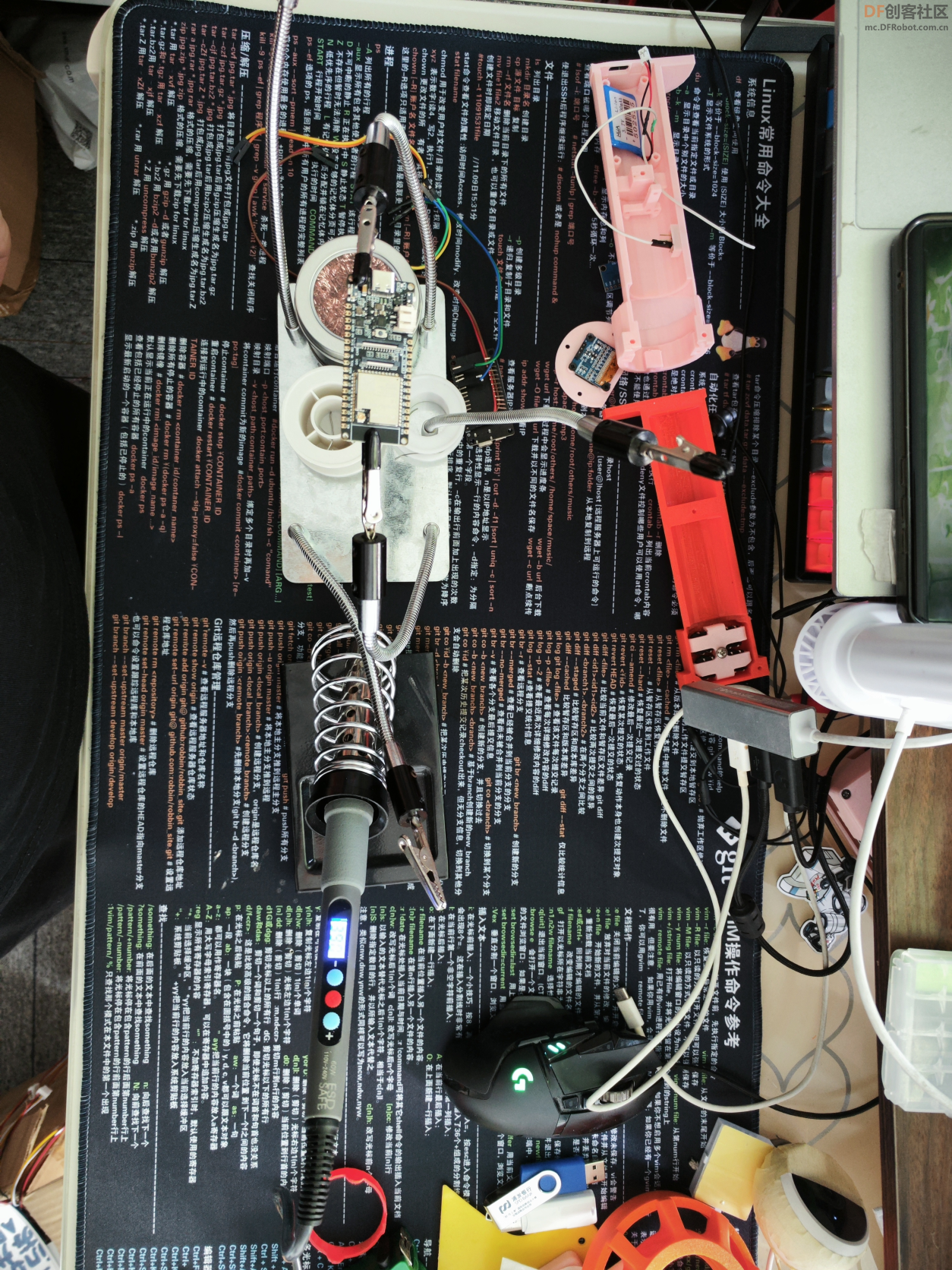 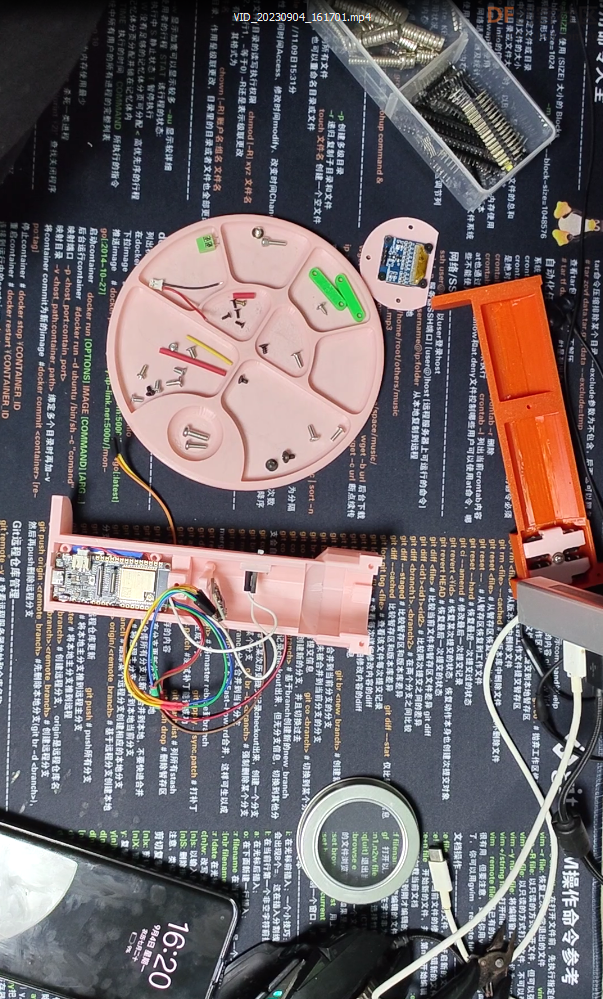 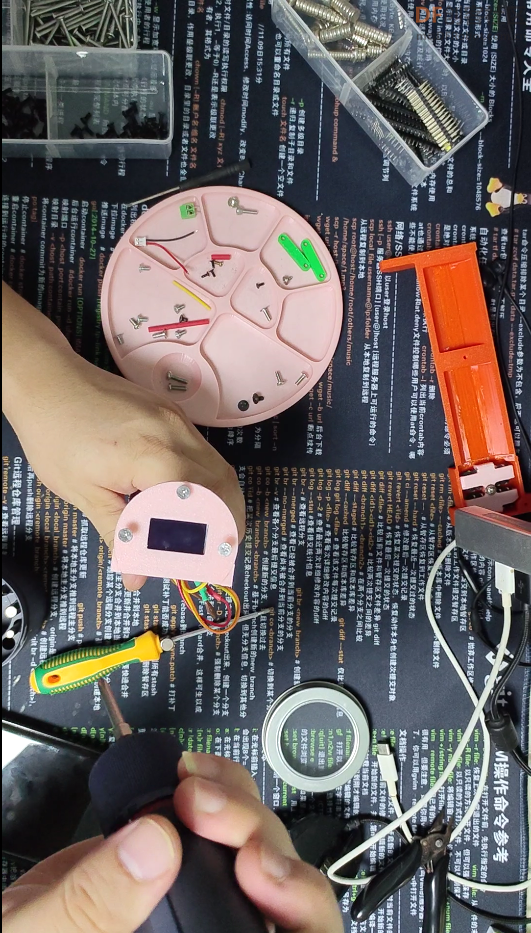  装好啦! 看看成品,闪亮登场,噔噔蹬蹬。。。。。。。 粉橙组合,这配色。。。。额,不是我的创意搭配,完全是因为橙色耗材没有了 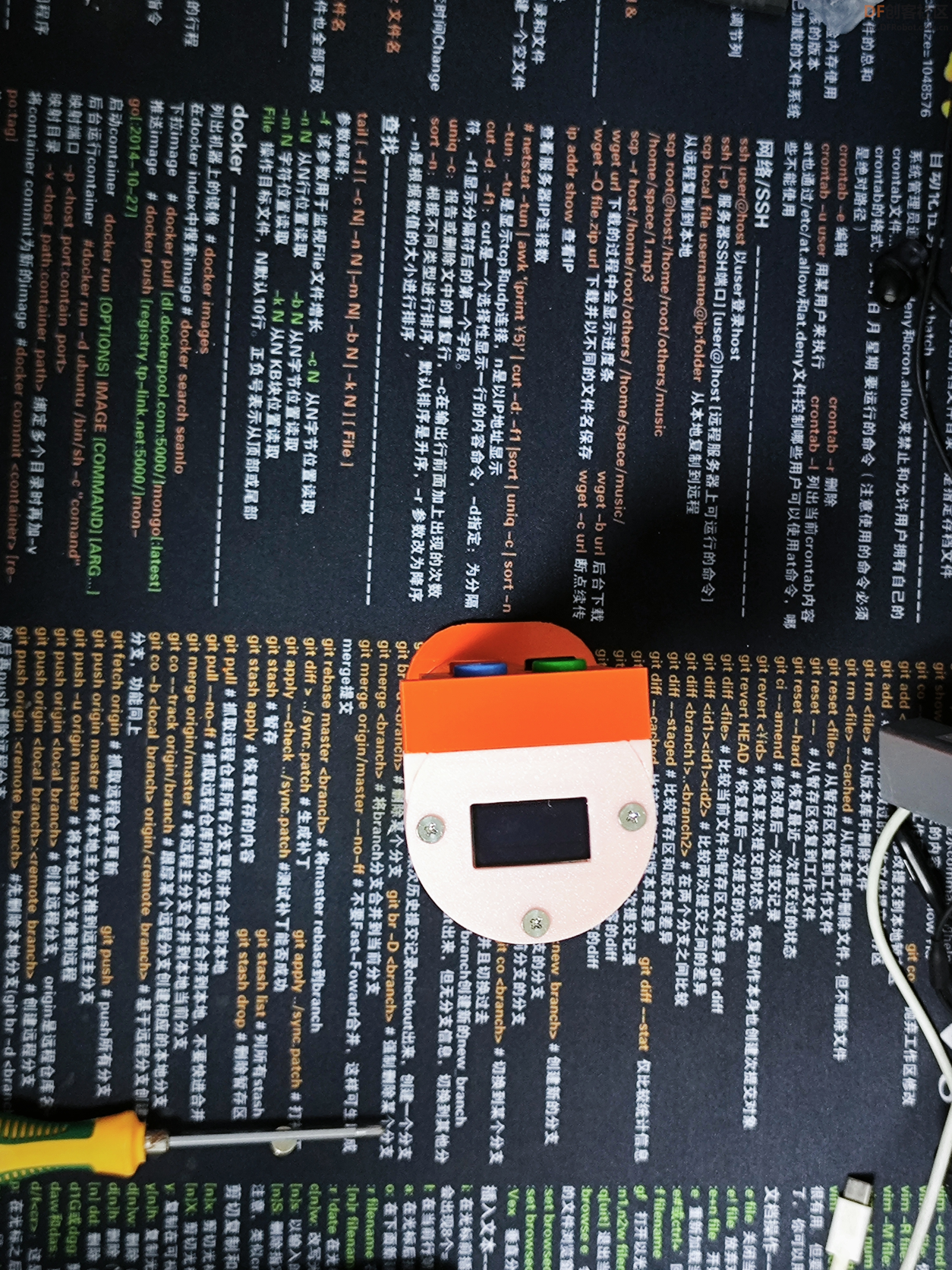   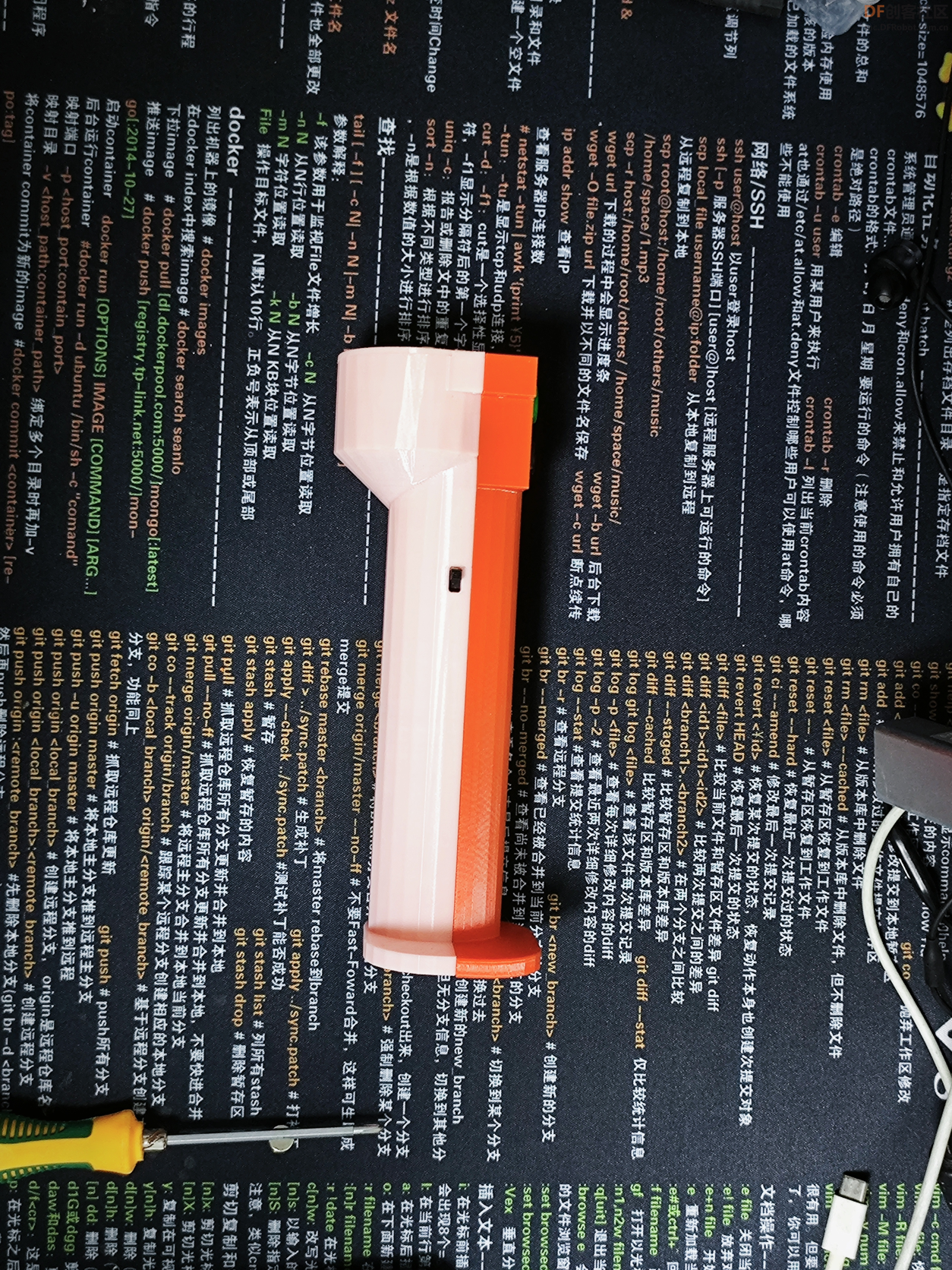  好啦,硬件部分到此结束,接下来就是给它注入灵魂啦,请继续关注我的下一篇博客,开始撸代码啦 !!!! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







