|
5232| 0
|
[ESP8266/ESP32] FireBeetle 2 ESP32-S3+自制工业机器人无线控制手柄(二)--软件篇 |
|
接上文,为了设计一个工业机器人无线控制器,硬件部分已经准备完毕。接下来是软件部分。整体思路是使用FireBeetle 2 ESP32-S3作为主控,采集MPU6050陀螺仪数据,然后通过websocket的通讯方式,将采集的数据发送给PC上位机。上位机再将数据分发给不同类型机器人,控制其运动。同时FireBeetle 2 ESP32-S3再将采集的数据,通过IIC的屏幕,显示在小屏幕上。 系统框架图如下: 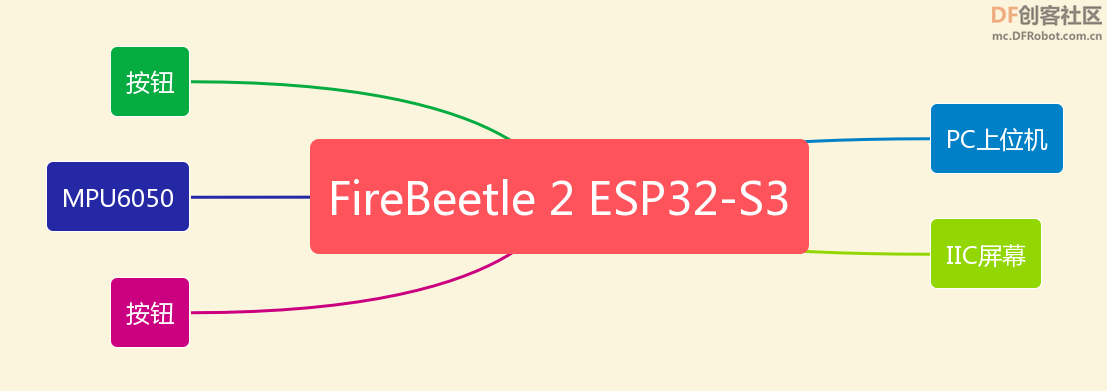 首先,设计采集MPU6050传感器数据的模块和屏幕显示模块。使用Adafruit_MPU6050库和Adafruit_SSD1306库,代码如下: #include <Adafruit_MPU6050.h> #include <Adafruit_SSD1306.h> #include <Adafruit_Sensor.h> Adafruit_MPU6050 mpu; Adafruit_SSD1306 display = Adafruit_SSD1306(128, 32, &Wire); int X; int Y; int Z; int Rx; int Ry; int Rz; int tempAcc = 5; int tempAng = 60; void setup() { Serial.begin(115200); // while (!Serial); Serial.println("MPU6050 OLED demo"); if (!mpu.begin()) { Serial.println("Sensor init failed"); while (1) yield(); } Serial.println("Found a MPU-6050 sensor"); // SSD1306_SWITCHCAPVCC = generate display voltage from 3.3V internally if (!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Address 0x3C for 128x32 Serial.println(F("SSD1306 allocation failed")); for (;;) ; // Don't proceed, loop forever } display.display(); delay(500); // Pause for 2 seconds display.setTextSize(1); display.setTextColor(WHITE); display.setRotation(0); } void loop() { sensors_event_t a, g, temp; mpu.getEvent(&a, &g, &temp); display.clearDisplay(); display.setCursor(0, 0); Serial.print("Accelerometer "); Serial.print("X: "); X = a.acceleration.x; if (abs(X) >= tempAcc) { X = a.acceleration.x; } else { X = 0; } Serial.print(X); Serial.print(" "); Serial.print("Y: "); Y = a.acceleration.y; if (abs(Y) >= tempAcc) { Y = a.acceleration.y; } else { Y = 0; } Serial.print(Y); Serial.print(" "); Serial.print("Z: "); Z = a.acceleration.z - 9; if (abs(Z) >= tempAcc) { Z = a.acceleration.z - 9; } else { Z = 0; } Serial.print(Z); Serial.println(" m/s^2"); display.println("Accelerometer - m/s^2"); display.print("X:"); display.print(X); display.print(", "); display.print("Y:"); display.print(Y); display.print(", "); display.print("Z:"); display.print(Z); display.println(""); Serial.print("Gyroscope "); Serial.print("RX: "); Rx = int(g.gyro.x) * (180.0 / PI); if (abs(Rx) >= tempAng) { Rx = int(g.gyro.x) * (180.0 / PI); } else { Rx = 0; } Serial.print(Rx); Serial.print(" "); Serial.print("RY: "); Ry = int(g.gyro.y) * (180.0 / PI); if (abs(Ry) >= tempAng) { Ry = int(g.gyro.y) * (180.0 / PI); } else { Ry = 0; } Serial.print(Ry); Serial.print(" "); Serial.print("RZ: "); Rz = int(g.gyro.z) * (180.0 / PI); if (abs(Rz) >= tempAng) { Rz = int(g.gyro.z) * (180.0 / PI); } else { Rz = 0; } Serial.print(Rz); Serial.println(" rps"); display.println("Gyroscope - dps"); display.print("Rx: "); display.print(Rx); display.print(", "); display.print("Ry: "); display.print(Ry); display.print(", "); display.print("Rz: "); display.print(Rz); display.println(""); display.display(); delay(100); } 代码主要通过修改MPU6050的官方例程,这些都有官方程序可以参考,没什么可多说的,唯一不同的是,我的MPU6050读取的数据漂移很厉害,而且传感器很灵敏,为了降低灵敏度,并过滤掉漂移的数据,我设计了将采集的数据只保留了整数部分。然后,再过滤掉采集的加速度数据的绝对值小于temacc和采集的陀螺仪数据的绝对值小于temang的数据,这样就会过滤掉因为灵敏和漂移产生的无效数据。如下图: 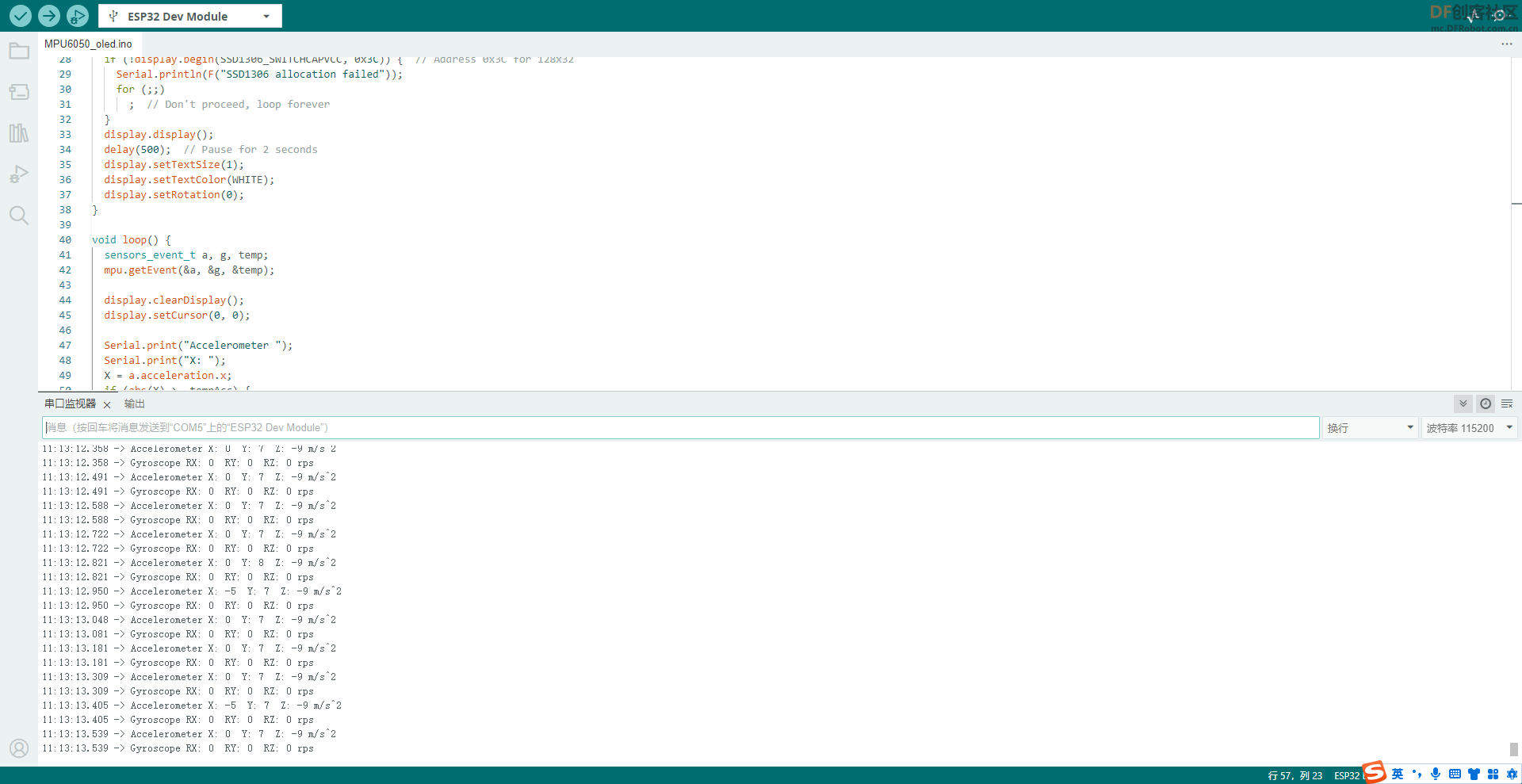   接下来实现websocket传输数据到上位机,同样使用官方库#include <WebSocketsServer_Generic.h>, 测试代码如下: /**************************************************************************************************************************** ESP32_WebSocketServer.ino For ESP32 Based on and modified from WebSockets libarary https://github.com/Links2004/ArduinoWebSockets to support other boards such as SAMD21, SAMD51, Adafruit's nRF52 boards, etc. Built by Khoi Hoang https://github.com/khoih-prog/WebSockets_Generic Licensed under MIT license Originally Created on: 22.05.2015 Original Author: Markus Sattler *****************************************************************************************************************************/ #if !defined(ESP32) #error This code is intended to run only on the ESP32 boards ! Please check your Tools->Board setting. #endif #define _WEBSOCKETS_LOGLEVEL_ 2 #include <WiFi.h> #include <WiFiMulti.h> #include <WiFiClientSecure.h> #include <WebSocketsServer_Generic.h> #define WS_PORT 8080 WiFiMulti WiFiMulti; WebSocketsServer webSocket = WebSocketsServer(WS_PORT); void hexdump(const void *mem, const uint32_t& len, const uint8_t& cols = 16) { const uint8_t* src = (const uint8_t*) mem; Serial.printf("\n[HEXDUMP] Address: 0x%08X len: 0x%X (%d)", (ptrdiff_t)src, len, len); for (uint32_t i = 0; i < len; i++) { if (i % cols == 0) { Serial.printf("\n[0x%08X] 0x%08X: ", (ptrdiff_t)src, i); } Serial.printf("%02X ", *src); src++; } Serial.printf("\n"); } String messageFromServer = String("Message from Server on ") + String(ARDUINO_BOARD); void webSocketEvent(const uint8_t& num, const WStype_t& type, uint8_t * payload, const size_t& length) { switch (type) { case WStype_DISCONNECTED: Serial.printf("[%u] Disconnected!\n", num); break; case WStype_CONNECTED: { IPAddress ip = webSocket.remoteIP(num); Serial.printf("[%u] Connected from %d.%d.%d.%d url: %s\n", num, ip[0], ip[1], ip[2], ip[3], payload); // send message to client webSocket.sendTXT(num, "Connected"); } break; case WStype_TEXT: Serial.printf("[%u] get Text: %s\n", num, payload); // send message to client webSocket.sendTXT(num, messageFromServer); // send data to all connected clients // webSocket.broadcastTXT(num, messageFromServer); break; case WStype_BIN: Serial.printf("[%u] get binary length: %u\n", num, length); hexdump(payload, length); // send message to client webSocket.sendBIN(num, payload, length); break; case WStype_ERROR: case WStype_FRAGMENT_TEXT_START: case WStype_FRAGMENT_BIN_START: case WStype_FRAGMENT: case WStype_FRAGMENT_FIN: break; default: break; } } void setup() { // Serial.begin(921600); Serial.begin(115200); while (!Serial); delay(200); Serial.print("\nStarting ESP32_WebSocketServer on "); Serial.println(ARDUINO_BOARD); Serial.println(WEBSOCKETS_GENERIC_VERSION); //Serial.setDebugOutput(true); WiFiMulti.addAP("HUAWEI_simo", "simo0309..."); //WiFi.disconnect(); while (WiFiMulti.run() != WL_CONNECTED) { Serial.print("."); delay(100); } Serial.println(); webSocket.begin(); webSocket.onEvent(webSocketEvent); // server address, port and URL Serial.print("WebSockets Server started @ IP address: "); Serial.print(WiFi.localIP()); Serial.print(", port: "); Serial.println(WS_PORT); } void loop() { webSocket.loop(); } 官方代码,基本上只需要更改自家WIFI的SSID和密码就行了,FireBeetle 2 ESP32-S3作为服务器,PC上位机作为客户端。 上位机我采用Qt编写,使用了QT的<QWebSocket>类。使用时,别忘记了在PRO文件中加上QT+=websockets。 上位机代码如下: WeSocketClient.h文件: #ifndef WESOCKETCLIENT_H #define WESOCKETCLIENT_H #pragma execution_character_set("utf-8") //允许中文 #include <QObject> #include <QWebSocket> class WeSocketClient : public QObject { Q_OBJECT public: explicit WeSocketClient(QObject *parent = nullptr); ~WeSocketClient(); bool connectedstate = false; void sendMessage(const QString &message);//发送信息函数 void open(); void close(); void flush(); QString message; private slots: void onConnected();//连接槽函数 void onDisconnected();//断开连接槽函数 void onTextMessageReceived(const QString &message);//接收信息槽函数 private: QWebSocket m_webSocket; signals: void SendConnectedState(bool state); void SendReceiveMsg(const QString &message); }; #endif // WESOCKETCLIENT_H WeSocketClient.cpp文件: #include "./include/WeSocketClient.h" #pragma execution_character_set("utf-8") //允许中文 WeSocketClient::WeSocketClient(QObject *parent) : QObject{parent} { connect(&m_webSocket, &QWebSocket::connected, this, &WeSocketClient::onConnected); connect(&m_webSocket, &QWebSocket::disconnected, this, &WeSocketClient::onDisconnected); } void WeSocketClient::sendMessage(const QString &message) { if(connectedstate) m_webSocket.sendTextMessage(message); } void WeSocketClient::open() { m_webSocket.open(QUrl(tr("ws://192.168.100.147:8080"))); } void WeSocketClient::close() { m_webSocket.close(); connectedstate = false; } void WeSocketClient::flush() { m_webSocket.flush(); connectedstate = false; } void WeSocketClient::onConnected() { connectedstate = true; emit SendConnectedState(true); qDebug() <<"jhc"; connect(&m_webSocket, &QWebSocket::textMessageReceived, this, &WeSocketClient::onTextMessageReceived); } void WeSocketClient::onDisconnected() { connectedstate = false; emit SendConnectedState(false); disconnect(&m_webSocket, &QWebSocket::textMessageReceived, this, &WeSocketClient::onTextMessageReceived); } void WeSocketClient::onTextMessageReceived(const QString &message) { this->message = message; //std::cout<<message<<std::endl; qDebug() <<message; emit SendReceiveMsg(message); } WeSocketClient::~WeSocketClient() { } 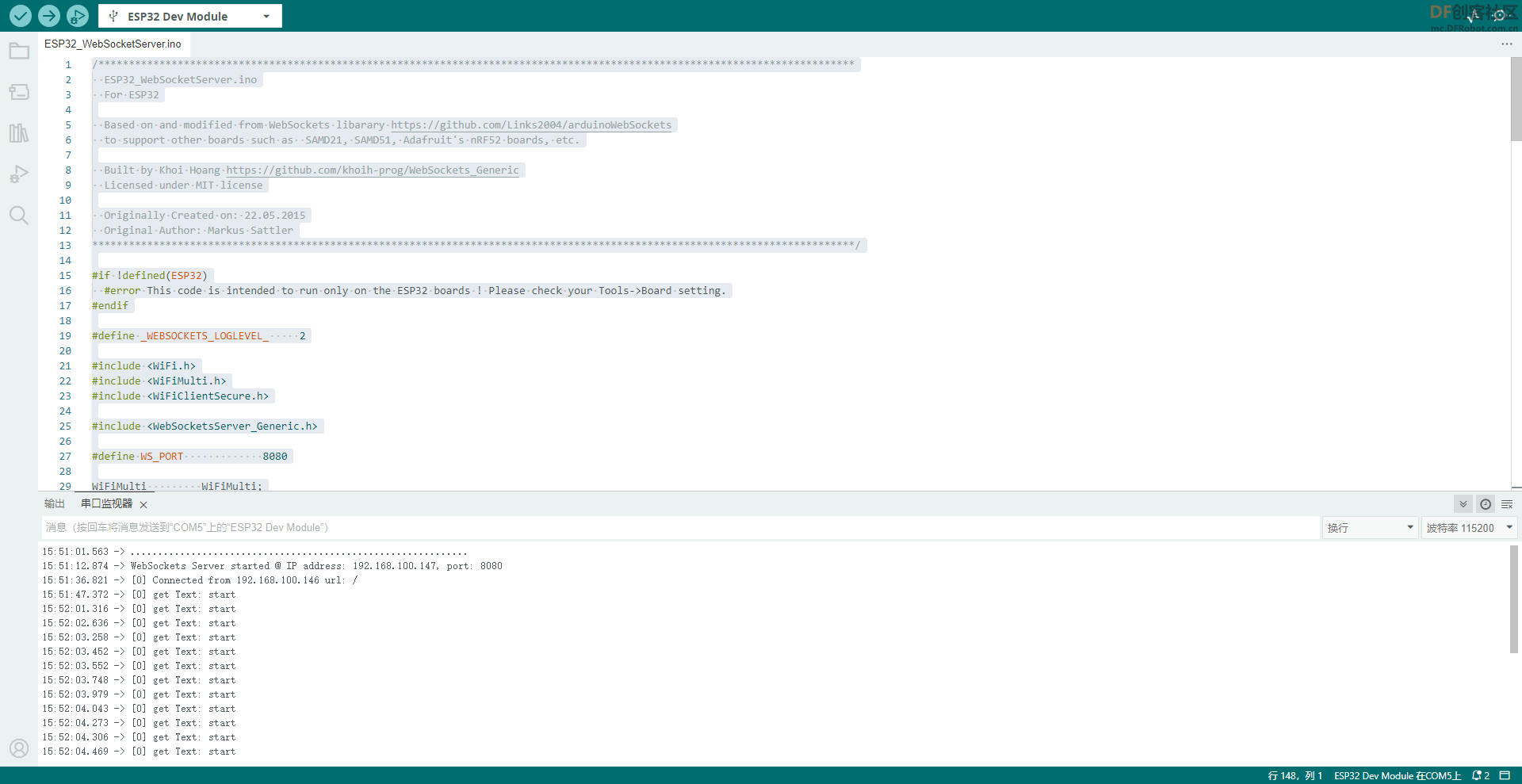  上位机是我做的一个综合性的程序,将这个功能加入到其中了,只展示无线控制器这部分,通讯测试没有问题,就开始把websocket程序和前面的mpu6050和屏幕的代码整合到一起了,将我需要的mpu数据发送给上位机。 代码如下: #include <Adafruit_MPU6050.h> #include <Adafruit_SSD1306.h> #include <Adafruit_Sensor.h> #define _WEBSOCKETS_LOGLEVEL_ 2 #include <WiFi.h> #include <WiFiMulti.h> #include <WiFiClientSecure.h> #include <WebSocketsServer_Generic.h> #define WS_PORT 8080 WiFiMulti WiFiMulti; WebSocketsServer webSocket = WebSocketsServer(WS_PORT); Adafruit_MPU6050 mpu; Adafruit_SSD1306 display = Adafruit_SSD1306(128, 32, &Wire); int X; int Y; int Z; int Rx; int Ry; int Rz; int tempAcc = 5; int tempAng = 60; uint8_t numc = 0; bool connectsate = false; void hexdump(const void* mem, const uint32_t& len, const uint8_t& cols = 16) { const uint8_t* src = (const uint8_t*)mem; Serial.printf("\n[HEXDUMP] Address: 0x%08X len: 0x%X (%d)", (ptrdiff_t)src, len, len); for (uint32_t i = 0; i < len; i++) { if (i % cols == 0) { Serial.printf("\n[0x%08X] 0x%08X: ", (ptrdiff_t)src, i); } Serial.printf("%02X ", *src); src++; } Serial.printf("\n"); } String messageFromServer; void webSocketEvent(const uint8_t& num, const WStype_t& type, uint8_t* payload, const size_t& length) { switch (type) { case WStype_DISCONNECTED: Serial.printf("[%u] Disconnected!\n", num); connectsate = false; numc = num; break; case WStype_CONNECTED: { IPAddress ip = webSocket.remoteIP(num); Serial.printf("[%u] Connected from %d.%d.%d.%d url: %s\n", num, ip[0], ip[1], ip[2], ip[3], payload); // send message to client webSocket.sendTXT(num, "Connected"); } break; case WStype_TEXT: Serial.printf("[%u] get Text: %s\n", num, payload); // send message to client connectsate = true; // send data to all connected clients // webSocket.broadcastTXT(num, messageFromServer); break; case WStype_BIN: Serial.printf("[%u] get binary length: %u\n", num, length); hexdump(payload, length); // send message to client webSocket.sendBIN(num, payload, length); break; case WStype_ERROR: case WStype_FRAGMENT_TEXT_START: case WStype_FRAGMENT_BIN_START: case WStype_FRAGMENT: case WStype_FRAGMENT_FIN: break; default: break; } } void setup() { Serial.begin(115200); // while (!Serial); Serial.println("MPU6050 OLED demo"); if (!mpu.begin()) { Serial.println("Sensor init failed"); while (1) yield(); } Serial.println("Found a MPU-6050 sensor"); // SSD1306_SWITCHCAPVCC = generate display voltage from 3.3V internally if (!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Address 0x3C for 128x32 Serial.println(F("SSD1306 allocation failed")); for (;;) ; // Don't proceed, loop forever } display.display(); delay(500); // Pause for 2 seconds display.setTextSize(1); display.setTextColor(WHITE); display.setRotation(0); //--------------websocket--------------------------------------------------- Serial.print("\nStarting ESP32_WebSocketServer on "); Serial.println(ARDUINO_BOARD); Serial.println(WEBSOCKETS_GENERIC_VERSION); display.clearDisplay(); display.println(ARDUINO_BOARD); display.println(WEBSOCKETS_GENERIC_VERSION); //Serial.setDebugOutput(true); WiFiMulti.addAP("HUAWEI_simo", "simo0309..."); //WiFi.disconnect(); while (WiFiMulti.run() != WL_CONNECTED) { Serial.print("."); display.clearDisplay(); display.print("."); delay(100); } Serial.println(); webSocket.begin(); webSocket.onEvent(webSocketEvent); // server address, port and URL Serial.print("WebSockets Server started @ IP address: "); Serial.print(WiFi.localIP()); display.clearDisplay(); display.println(WiFi.localIP()); Serial.print(", port: "); display.println(WS_PORT); Serial.println(WS_PORT); } void loop() { sensors_event_t a, g, temp; mpu.getEvent(&a, &g, &temp); display.clearDisplay(); display.setCursor(0, 0); Serial.print("Accelerometer "); Serial.print("X: "); X = a.acceleration.x; if (abs(X) >= tempAcc) { X = a.acceleration.x; } else { X = 0; } Serial.print(X); Serial.print(" "); Serial.print("Y: "); Y = a.acceleration.y; if (abs(Y) >= tempAcc) { Y = a.acceleration.y; } else { Y = 0; } Serial.print(Y); Serial.print(" "); Serial.print("Z: "); Z = a.acceleration.z - 9; if (abs(Z) >= tempAcc) { Z = a.acceleration.z - 9; } else { Z = 0; } Serial.print(Z); Serial.println(" m/s^2"); display.println("Accelerometer - m/s^2"); display.print("X:"); display.print(X); display.print(", "); display.print("Y:"); display.print(Y); display.print(", "); display.print("Z:"); display.print(Z); display.println(""); Serial.print("Gyroscope "); Serial.print("RX: "); Rx = int(g.gyro.x) * (180.0 / PI); if (abs(Rx) >= tempAng) { Rx = int(g.gyro.x) * (180.0 / PI); } else { Rx = 0; } Serial.print(Rx); Serial.print(" "); Serial.print("RY: "); Ry = int(g.gyro.y) * (180.0 / PI); if (abs(Ry) >= tempAng) { Ry = int(g.gyro.y) * (180.0 / PI); } else { Ry = 0; } Serial.print(Ry); Serial.print(" "); Serial.print("RZ: "); Rz = int(g.gyro.z) * (180.0 / PI); if (abs(Rz) >= tempAng) { Rz = int(g.gyro.z) * (180.0 / PI); } else { Rz = 0; } Serial.print(Rz); Serial.println(" rps"); display.println("Gyroscope - dps"); display.print("Rx: "); display.print(Rx); display.print(", "); display.print("Ry: "); display.print(Ry); display.print(", "); display.print("Rz: "); display.print(Rz); display.println(""); display.display(); messageFromServer = String(X) + "," + String(Y) + "," + String(Z) + "," + String(Rx) + "," + String(Ry) + "," + String(Rz); if (connectsate) { webSocket.sendTXT(numc, messageFromServer); } webSocket.loop(); delay(100); } 主循环中加了,如果接收到客户端发送的字符,就可以循环发送陀螺仪的数据到上位机。   由于上位机控制机械臂是公司项目,不方便公开,所以暂时不展示了。后面如果有机会,再开源。 下面是视频展示 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






